 PLC模擬量的控制特點_PLC模擬量的分類
PLC模擬量的控制特點_PLC模擬量的分類
PLC模擬量的控制特點
1、誤差
模擬量在時間上、取值上是連續的。
對模擬量按一定時間間隔取值,稱為采樣。采樣后得到的值即為離散量。顯然,離散量在時間上是離散的,即只在采樣的瞬間代表當時的模擬量值,其他時刻的模擬量的值不代表。但取值上是連續的。
用數值來逼近離散量,即求與實際的離散量最接近的數字量,稱為量化。量化后的離散量稱為數字量。數字量在時間與取值上都是離散的。
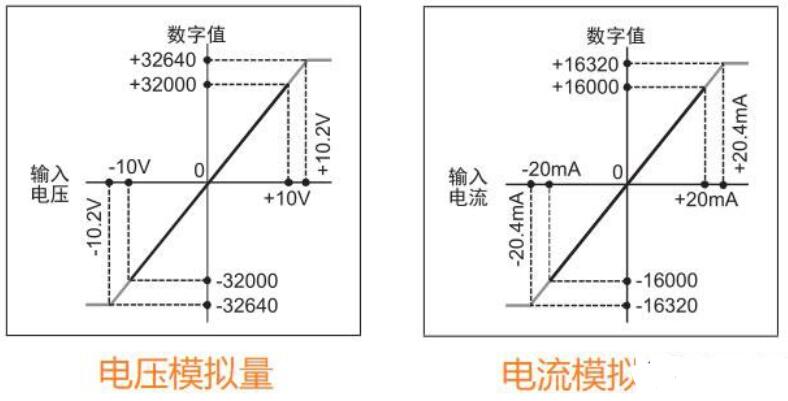
PLC只能處理數字量,而要用它控制模擬量,必須先要對這些模擬量進行采樣與量化。
正是要量化,所以量化后的值總是與模擬量的原值存在誤差,但這個誤差是可控的。辦法靠選用合適的輸入、輸出模塊的位數。如用8位輸入模塊,其量化的值只能是0到255(16進制FF)之間的整數。故其分辨率為256分之一。如果選的位數多,分辨率高精度也高。單位數多,模塊也貴。高過16位時還要用雙字指令處理,但這也將增加資源開銷和處理時間。
誤差可得到控制是一個最重要的優點,只是這里也有一個合理的“度”,應在保證精度的要求下,力求減小位數。
2、斷續
正是要采樣,所以是斷續的。只是在PLCI/O刷新時,輸入模塊才把實際值讀入PLC;輸出模塊或輸出點才把控制信號輸給系統,并控制系統。只有在這時,才相當于它的采樣開關合上,系統是閉合的。但這個閉合時間是很短暫的。而較長的時間是用在PLC運行程序、對采集到的數據進行處理。而這期間系統閉環是斷開的。可見,PLC模擬量控制系統是典型的采樣控制系統。
為了保證采樣信號能較少失真地恢復為原來的連續信號,根據采樣定理,采樣頻率一般應大于或等于系統頻率的兩倍。最大頻率是系統幅頻特性上幅值為零時的頻率。
3、時延
實際系統本身的慣性及動作傳遞也有個過程,有一定時延。用PLC進行控制,采樣、信息處理及控制輸出也有個過程,更有時延。在實施一個新一輪的控制作用后,不能指望立即就會有所反應。所以,不能因為一時不能得到所期望的反應,就一味地改變控制作用。那樣,很可能使系統出現不穩定。再如,用PID控制,其運算間隔不應太短,如無特殊措施,其間隔起碼要大于程序的掃描周期等。
PLC模擬量的分類
1、按模擬量控制方法分,有單回路反饋控制、串級控制等。
2、按控制方式分,有開環控制系統、閉環控制系統及復合控制系統。
3、按元件類型分,有機械系統、電氣系統、機電系統、液壓系統及氣動系統。
4、按系統功能分,有溫度控制系統、壓力控制系統、流量控制系統、位置控制系統及速度控制系統。
5、按系統性能分,有線性系統和非線性系統、定常系統和時變系統。
6、按輸出量分,有定值控制系統(調節器),隨動系統及程序控制系統。
7、按模擬量的輸入方法分,有模擬量輸入單元(AI)、脈沖輸入(PI)。
8、按控制模擬量輸出的方法分,有模擬量輸出單元(AO)、開關量的ON/OFF(DO)輸出、脈沖量(不同脈寬)輸出(PO)。
-
plc
+關注
關注
5022文章
13449瀏覽量
467325 -
PLC模擬量
+關注
關注
0文章
13瀏覽量
8543
發布評論請先 登錄
相關推薦
PLC如何讀取模擬量的數據







 工商網監
工商網監
評論