 51單片機的數制和指令系統的講解及制作一個單片機最小系統的概述
51單片機的數制和指令系統的講解及制作一個單片機最小系統的概述
在講指令系統前我們先來復習一下數制的概念。
1.十進制(Decimal)
基數是10,它有10個數字符號,即0,l,2,3,4,5,6,7,8,9。其中最大數碼是基數減1,即9,最小數碼是0。
2.二進制(Binary)
基數是2,它只有兩個數字符號,即0和1。這就是說,如果在給定的數中,除0和1外還有其它數,例如 1012,它就決不會是一個二進制數。
3、十六進制(Hexadecilnal)
基數是16,它有16個數字符號,除了十進制中的10個數可用外,還使用了6個英文字母。它的16個數字依次是0,l,2,3,4,5,6,7,8,9,A,B,C,D,E,F。其中A至F分別代表十進制數的10至15,最大的數字也是基數減1。
4、二進制數與十六進制數的相互轉換。
(1)、二進制轉換為十六進制:
整數部分,從低位開始,小數部分,從高位開始,每四位一組(不夠四位的補0),轉換為對應的十六進制數。
例:(1 0001 0011.1100 0111)2=(113.C7)H
(2)、十六進制轉換為二進制:
將十六進制數的每一位分別轉換為對應的四位二進制數。
例:(3E9D)H=(11 1110 1001 1101)B
例:( 2ABE)H= 0010 1010 1011 1110B
以后我們在單片機編程方面采用十六進制,這個請大家注意了!
MCS-51系列單片機的指令系統共有111條指令,其中49條是單字節指令,45條是雙字節指令,17條是三字節指令。
MCS-51的指令系統共有33個功能,用匯編編程時只需要42個助記符就能指明這33個功能操作。
1、 指令格式:MCS-51匯編語言指令格式與其他微機的指令格式一樣,均由以下幾部分組成:[標號:]操作碼 [操作數][,操作數][;注釋]
標號:又稱為指令地址符號,地址的符號化,一般由1到6個字符組成,以字母開頭的字母數字串,與操作碼之間用冒號分開。
操作碼:是由助記符表示的字符串,它規定了指令的操作功能。
操作數:是指參加操作的數據和數據的地址。
注釋:是為該條指令作說明,以便于閱讀。
注意:[ ]中表示為可選項。操作數可以為1、2、3個,也可以沒有。
不同功能的指令,操作數作用不同,如:傳送指令多數有兩個操作數,寫在左面的是目的操作數(表示操作結果存放的單元地址),寫在右面的稱為源操作數(指出操作數的來源)。操作碼和操作數之間必須用空格分隔,操作數與操作數之間必須用逗號“,”分隔。帶方括號項可有可無,稱為可選項。操作碼是指令的核心不可缺少。
2、 指令分類
MCS-51的111條指令分為下面5類:
(1) 數據傳送類指令29條,分為片內RAM,片外RAM、程序存儲器的傳送指令,交換及堆棧操作指令。
(2) 算術運算類24條,分為加,帶進位加,減,乘,除,加1,減1指令。
(3) 邏輯運算類24條,分為邏輯與、或、異或、移位指令。
(4) 控制程序轉移類17條,分為無條件轉移與調用,條件轉移,空操作指令。
(5) 布爾變量操作類17條,分為數據傳送、位與、位或,位轉移指令。
3. 指令代碼:
(1) 數據傳送類
MOV 傳送數據
指令格式:MOV A,#DATA;將立即數DATA送到累加器A中。
例:
MOV P1,#11111110B;把立即數11111110B傳送到P1口。
MOVX 片外數據存儲器傳送數據
指令格式:MOVX A,@DPTR;將DPTR指向的地址單元中的內容傳送至A中。
例:MOV DPTR,#1000H;將地址1000H傳送到數據指針DPTR中。
MOVX A,@DPTR;將DPTR指向的地址單元(1110H)中的內容傳送至A中。
MOVC 程序存儲器傳送數據
指令格式: MOVC A,@A+DPTR;
例:MOV A,#00H
MOV DPTR,#1000H;將地址1000H傳送到數據指針DPTR中。
MOVC A,@A+DPTR;把累加器A的值和DPTR的值相加得到值作為地址,把這個程序存儲器的地址單元中的內容傳送到A中。
(2) 算術運算指令
ADD 不帶進位的加法類指令
指令格式:ADD A,#DATA;把立即數DATA和累加器A的內容相加得到的值存放到累加器A中。A+DATA→A
例:
SETB C;讓累加器C置1
MOV A,#01H;A=01H
ADD A,#01H;A=02H
ADDC 帶進位的加法類指令
指令格式:ADDC A,#DATA;把立即數DATA和累加器A的內容相加,再加上進位標志C得到的值存放到累加器A中。A+DATA+C→A
例:
SETB C; 把累加器C置1
MOV A,#01H ; A=01H
ADDC A,#01H; A+DATA+C→A ,A=03H
SUBB帶借位的減法類指令
指令格式:SUBB A,#DATA;把累加器A的內容減去立即數DATA再減去進位標志C得到的值存放到累加器A中。A-DATA-C→A
例:
SETB C; 讓累加器C置1
MOV A,#03H; A=03H
SUBB A,#01H; A=01H
INC加一指令
指令格式:INC A ;把A的內容加1再存儲到A中。
例:
MOV A,#01H;A=01H
INC A ;A=02H
DEC 減1指令
指令格式:DEC A ;把A的內容減1再存儲到A中。
例:
MOV A,#03H ;A=03H
DEC A ;A=02H
(3) 邏輯運算指令
CLR 清零指令
指令格式:CLR A ;把A的內容清零再存儲到A中,A=00H。
MOV A,#00000001B;A=00000001B
CLR A ;A=00000000B
CPL 按位取反
指令格式:CPL A ;把A的內容按位取反后再存儲到A中。
例:
MOV A,#00000001B;A=00000001B
CPL A ;A=11111110B
ANL 按位取與
指令格式:ANL A ;把A的內容按位取與后再存儲到A中。
例:
MOV A,#01000001B ; A=00000001B
ANL A,#01001111B ; A=01000001B
ORL 按位取或
指令格式:ORL A ;把A的內容按位取或后再存儲到A中。
例:
MOV A,#00000001B ;A=00000001B
ORL A,#10001111B ;A=10001111B
XRL 按位取異或,相同為0,不同為1。
指令格式:XRL A ;把A的內容按位取異或后再存儲到A中。
例:
MOV A,#00000001B;A=00000001B
XRL A,#00001111B ;A=00001110B
RL左移位指令
指令格式:RL A ;把A的內容按位左移后再存儲到A中。
例:
MOV A,#00000001B;A=00000001B
RL A ;A=00000010B
RL A ;A=00000100B
RL A;A=00001000B
RR右移位指令
指令格式:RR A ;把A的內容按位右移后再存儲到A中。
例:
MOV A,#00000001B ;A=10000000B
RR A ;A=01000000B
RR A ;A=00100000B
RR A ;A=00010000B
(4) 位操作指令
SETB 置1指令,只能對位操作,不可以對字節操作。
指令格式:SETB BIT ;對位BIT置1。
例:
SETB P1.0 ;P1.0=1
CLR 清零指令,可對位操作,也可對字節操作。
指令格式:CLR BIT ;對位BIT置0。
SETB C
MOV A,#11110000B
CLR C
CLR A
CPL 取反,可對位操作,也可對字節操作。
指令格式:CPL BIT ;對位BIT取反。
SETB C
MOV A,#11110000B
CPL C
CPL A
(5) 控制及轉移指令
LJMP 長跳轉指令
指令格式: LJMP 標號;程序將跳轉到標號處執行。
LCALL長調用子程序指令,常與RET配合使用。
指令格式: LCALL 標號;調用為標號的子程序去執行。
RET子程序返回指令。
DJNZ 條件轉移類指令(自減一指令)
指令格式: LOOP:DJNZ R7,LOOP
執行分兩步:
(1) 將R7的內容減一后再送到R7中。
(2) 判斷R7是不是等于0
如果是等于0,順序執行下面的程序。
如果不等于0,跳轉到標號為LOOP的地方去執行。
例:
MOV R7,#3;送循環次數。
CLR A;對A清零。
LOOP:INC A;對A加1。
DJNZ R7,LOOP;先讓R7自減1,后判斷是否等于0。
;不等于0跳轉,等于零往下執行。
END
運行上面的程序后累加器A的值是多少?
答案:A=03H
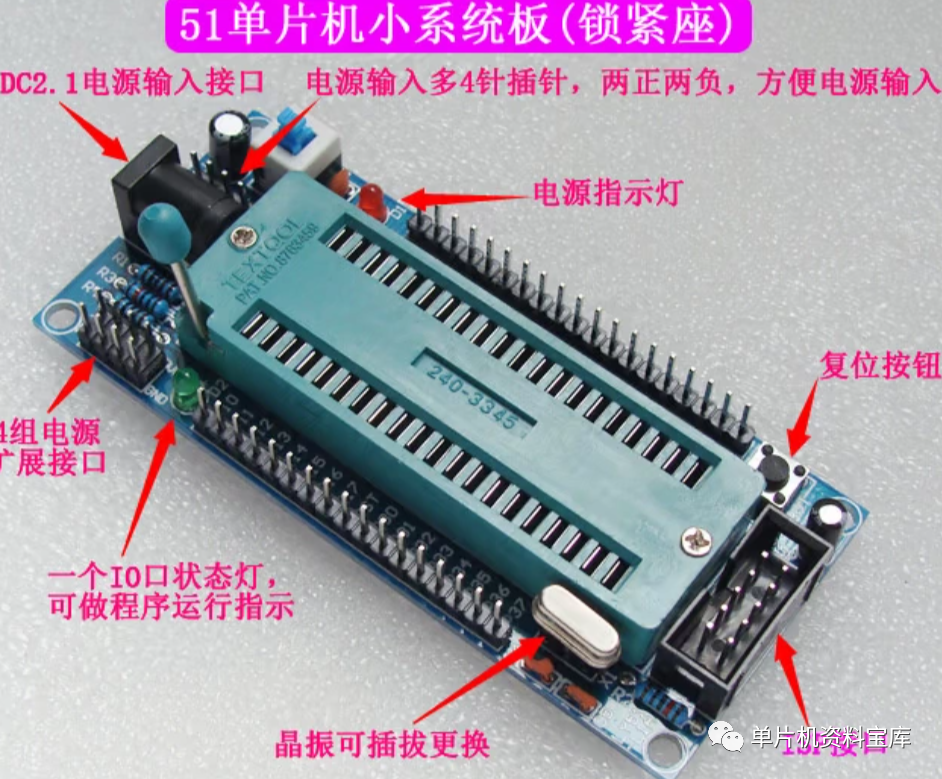
學完了指令系統現在我們來實戰一下,一個單片機最小系統的制作
單片機最小系統制作
一、確定任務
開發單片機最小系統
二、任務分析:
該系統具有的功能:
(1)具有2位LED數碼管顯示功能。
(2)具有八路發光二極管顯示各種流水燈。
(3)可以完成各種奏樂,報警等發聲音類實驗。
(4)具有復位功能。
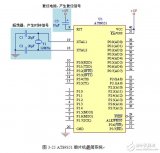
三、功能分析
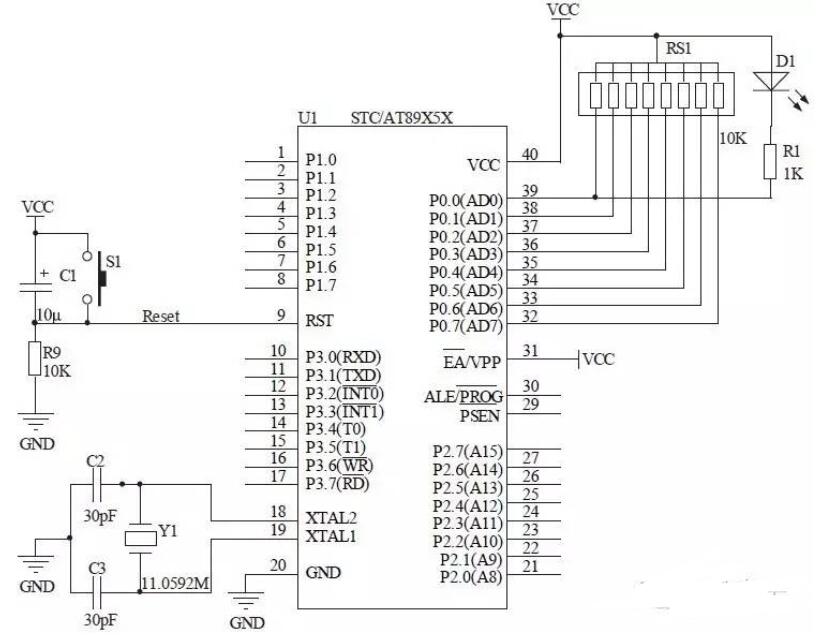
(1)兩位LED數碼管顯示功能,我們可以利用單片機的P0口接兩個數碼管來現這個功能;
(2)八路發光二極管顯示可以利用P1口接八個發光二極管實現這個功能;
(3)各種奏樂、報警等發聲功能可以采用P2.0這個引腳接一蜂鳴器來實現。
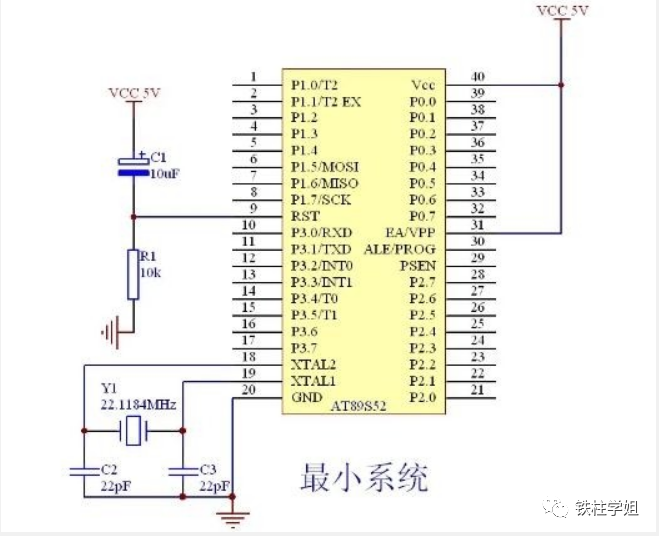
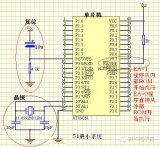
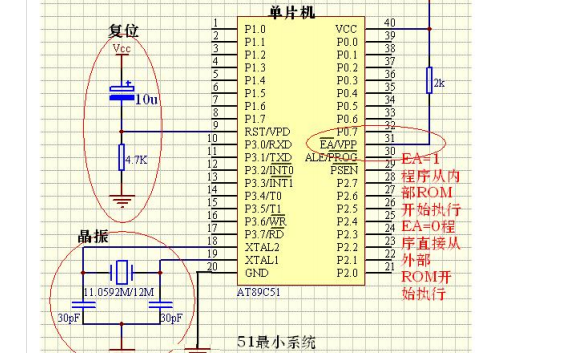
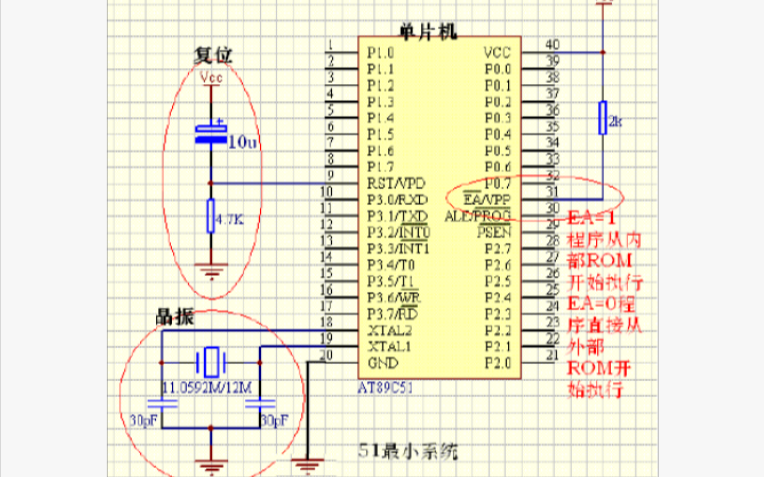
(4)利用單片機的第9腳可以設計成復位系統,我們采用按鍵復位;利用單片機的18、19腳可以設計成時鐘電路,我們利用單片機的內部振蕩方式設計的。
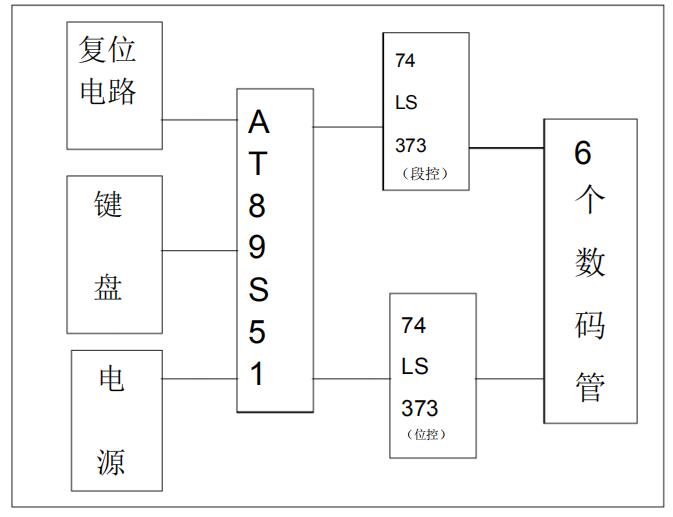
四、設計框圖
根據本系統的功能,和單片機的工作條件,我們設計出下面的電路圖。
六、元件清單的確定:
數碼管:共陰極2只(分立)
電解電容:10UF的一只
30PF的電容2只
220歐的電阻9只
4.7K的電阻一只
1.2K的電阻一只
4.7K的排阻一只,
12MHZ的晶振一只
有源5V蜂名器一只
AT89S51單片機一片
常開按鈕開關1只
緊鎖座一只(方便芯取下來的,綠色的)
發光二極管(5MM紅色)8只
萬能板電路版15*17CM
S8550三極管一只
4.5V電池盒一只,導線若干。
七、硬件電路的焊接
按照原理圖把上面的元件焊接好,詳細步驟省略。
八、相關程序編寫
針對上面的電路原理圖,設計出本系統的詳細功能:
(1)、第一個發光二極管點亮,同時數碼管顯示“1”。
(2)、第二個發光二極管點亮,同時數碼管顯示“2”。
(3)、依次類推到第八個發光二極管點亮,同時數碼管顯示“8”。
以上出現的是流水燈的效果
(4)、所有的發光二極管滅了,同時數碼管現實“0”。
(5)、數碼管顯示“1”。
(6)、數碼管顯示“2、……”直到“9、A、B、C、D、E、F、Y”。
(7)、蜂鳴器發出九聲報警聲后重復上面所有步驟。
(8)程序如下:
ORG 0000H;偽指令,定義下面的程序代碼(機器代碼)從地址為0000H的單元存放。
LJMP START;跳轉到標號為START的地方去執行。
ORG 0030H;偽指令,定義下面的程序代碼(機器代碼)從地址為0030H的單元存放。
START:MOV P1,#0FEH ;點亮第一個發光二極管。
CLR P2.7 ;送低電平到第一個數碼管,開啟數碼管。
CLR P2.6 ;送低電平到第二個數碼管,開啟數碼管。
MOV P0,#06H;讓數碼管顯示“1” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0FDH;點亮第二個發光二極管。
MOV P0,#5bH;讓數碼管顯示“2” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0FBH;點亮第三個發光二極管。
MOV P0,#4fH;讓數碼管顯示“3” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0F7H;點亮第四個發光二極管。
MOV P0,#66H;讓數碼管顯示“4” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0EFH;點亮第五個發光二極管。
MOV P0,#6dH;讓數碼管顯示“5” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0DFH;點亮第六個發光二極管。
MOV P0,#7dH;讓數碼管顯示“6” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#0BFH;點亮第七個發光二極管。
MOV P0,#07H;讓數碼管顯示“7” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#7FH;點亮第八個發光二極管。
MOV P0,#7fH;讓數碼管顯示“8” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P1,#00H;滅了所有的發光二極管。
MOV P0,#3FH;讓數碼管顯示“0” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#06H;讓數碼管顯示“1” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#5bH;讓數碼管顯示“2” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#4fH;讓數碼管顯示“3” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#66H;讓數碼管顯示“4” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#6dH;讓數碼管顯示“5” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7dH;讓數碼管顯示“6” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#07H;讓數碼管顯示“7” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“8” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#6fH;讓數碼管顯示“9” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“A” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“b” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“C” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“d” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“E” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“F” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV P0,#7fH;讓數碼管顯示“Y” 。
LCALL DELAY;調用延時子程序,起到延時的目的。
MOV R4,#9;送蜂鳴器的報警次數。
LOOP:SETB P2.0;不發聲
LCALL DELAY;調用延時子程序,起到延時的目的。
CLR P2.0;發聲。
LCALL DELAY;調用延時子程序,起到延時的目的。
DJNZ R4,LOOP;發聲九次后向下執行。
SETB P2.0;關閉發聲
LJMP START;跳轉到標號為START處執行,循環本程序。
DELAY:MOV R7,#200;這是延時子程序。
D1:MOV R6,#200
D2:MOV R5,#200
D3:DJNZ R5,D3
DJNZ R6,D2
DJNZ R7,D1
RET;延時子程序返回指令。
END;結束偽指令。
九、利用KEIL C51 軟件對上面的程序進行調試和編譯,產生*.HEX文件,以便用編程器寫入單片機芯片中。
十、編程器的使用:用編程器把電腦里生成的*.HEX文件寫到芯片中。
-
存儲器
+關注
關注
38文章
7484瀏覽量
163764 -
51單片機
+關注
關注
274文章
5702瀏覽量
123492 -
指令系統
+關注
關注
1文章
81瀏覽量
15642
發布評論請先 登錄
相關推薦
單片機最小系統






 工商網監
工商網監
評論