 一文讀懂室內定位技術
一文讀懂室內定位技術
目前Bluetooth AoA可以有兩種不同的應用場景,第一,室內位置定位;第二,無鑰匙進入,我們一一敘述,今天只講第一種。
1. 室內定位技術梳理
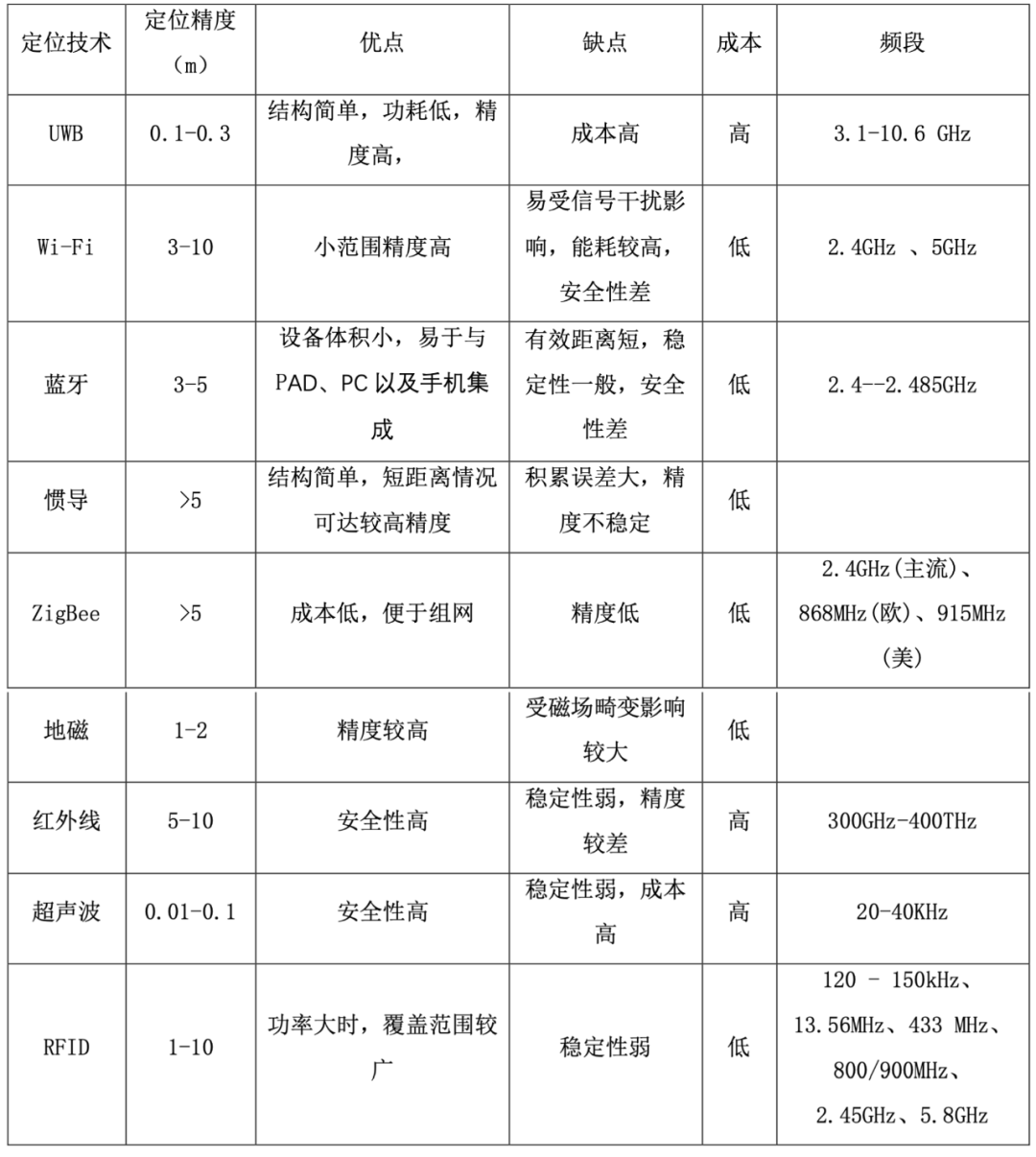
目前室內定位有采用UWB,Wifi,BLE信標和BLE AoA三種實現方式,UWB精度在0.1-1米范圍,Wifi,BLE信標誤差范圍較大在5-20m范圍,Quuppa作為第一家商用BLE AoA定位服務公司,可以精度范圍在0.1-1m范圍。(采用TI CC254x,Nordic5281x芯片)。

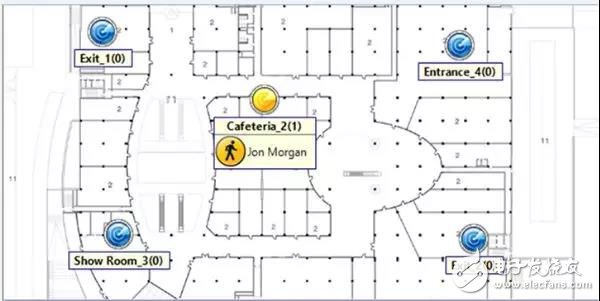
Quuppa測試數據
2. 室內定位原理分析
無論采用何種定位方式,室內定位系統需要建模實際場景,在室內區域部署接收機路由器,并在建模地圖中標記相應位置;手機或是信標模塊,作為beacon發射機,發送無線信號,部署在固定位置的接收機在接收到無線信號后即可判定該信標進入該區域范圍。
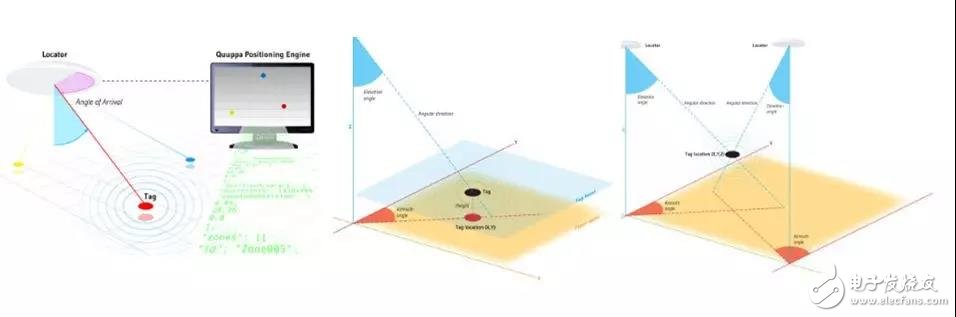
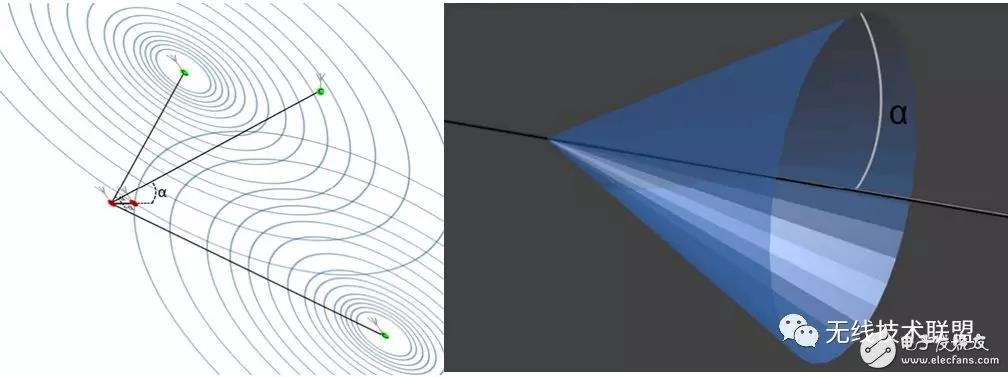
在確定區域范圍之后,可以通過多天線測量beacon信號到達角度,以及三角形定位法,即可計算出beacon設備精確位置。
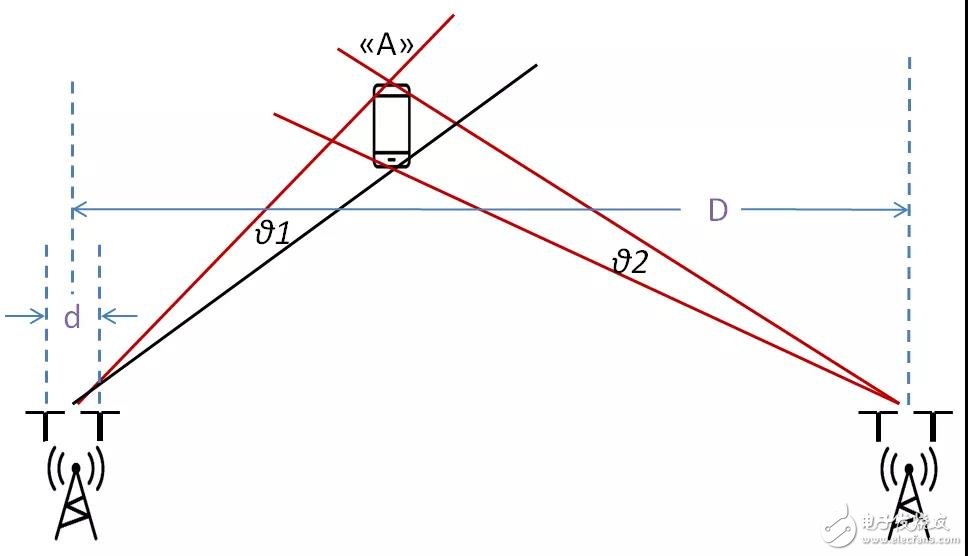
三角定位三角定位法顧名思義即通過兩組到達角度,確定beacon設備位置,如下圖所示,兩組天線即可測量到一個到達角度,兩個到達角度即可確定設備A位置。關鍵問題來了,d和D都是已知參數,如何求θ1,和θ2。
3. 到達角度AoA(Angle of Arrive)測量原理
工作頻率:藍牙信號在ISM (Industrial Scientific and Medical ) 2.40GHz到2.41GHz頻段工作,帶寬為2M hz,藍牙分為三個廣播信道,37,38,39,并且在藍牙5.x規范當中,Bluetooth LE部分的擴展廣播信道可以在0-39任意信道,也即位藍牙信標可以工作在任何藍牙頻道。(藍牙在工作時的工作頻率不一致,會影響藍牙的波長λ發生變化)。
相位:無線信號在空中傳播是連續的,RX接收機通常會接受該頻段范圍內0-2π整個無線信號的傳輸時間的信號并解調。
到達角度計算:假設目前有一固定頻率藍牙beacon信號在空曠區域進行傳播(忽略遇到障礙物以及空中其他2.4G信號干擾),如果兩接收機處于相同TX端相同半徑上,在某一時刻t,RX接收機接收到的相位差理應為0,但如量接收機處于半徑不一致的位置,在某一時刻t,RX接收機的相位是有一個差值。
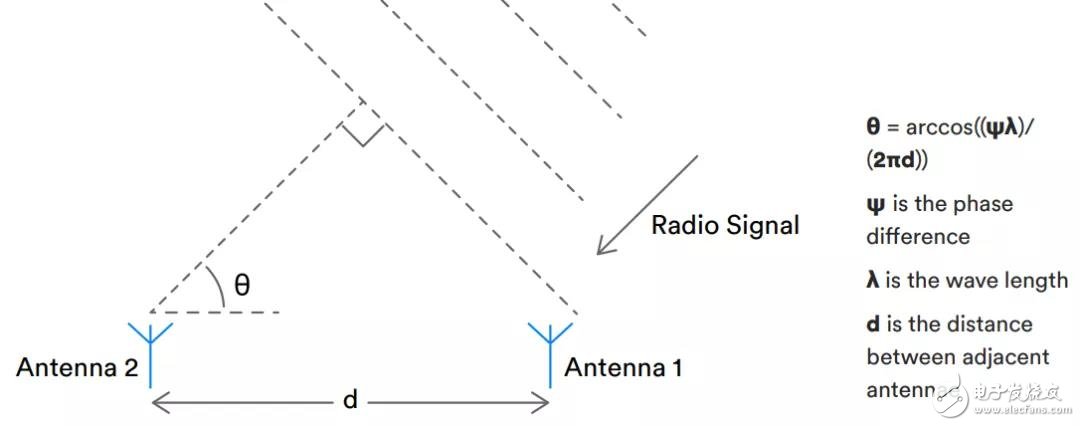
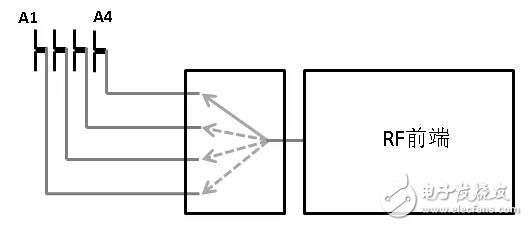
如果上面的這幅圖不好理解,我們換下面的示意圖來表示這幅,信號在傳輸過程中因天線位置不同,在某一個時間t上,采樣到該信號的相位有差異。
在已知兩天線位置d,beacon信號頻率(即波長),可以計算出beacon信號與天線A1,A2直接的相位差θ,在計算出不同位置的兩組θ,即可計算出beacon信號的位置。
AoA測量誤差
在2維平面為例,會存在兩個為a的角度,在現實三位坐標下,則會有一個以a為半徑的圓的軌跡線,AoA接收機只知道該beacon信號處于該圓圈軌跡上,但無法判斷它們處于哪個位置,這個時候就需要正交天線陣列來確認beacon點的位置坐標。
天線陣列的布置方式多種多樣,一為定位,二為最大化減少接收機部署的個數,常見天線整列部署如下所示。
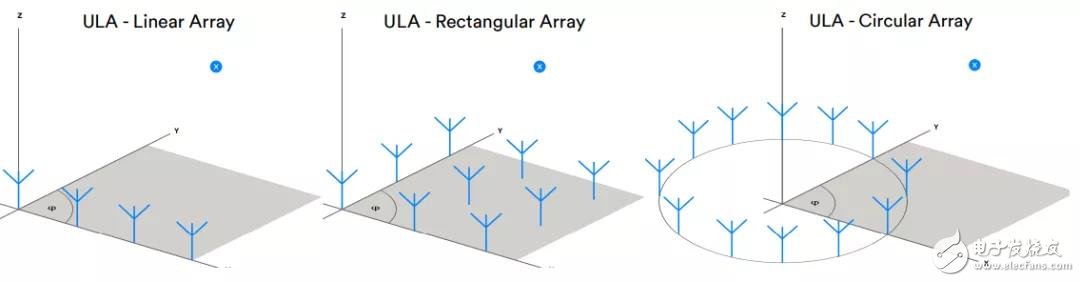
天線陣列舉例
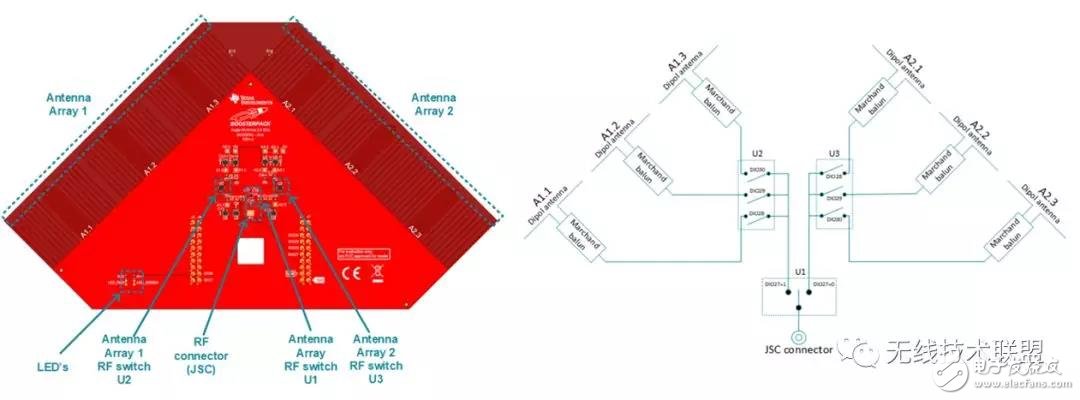
TI德州儀器EVM天線陣列
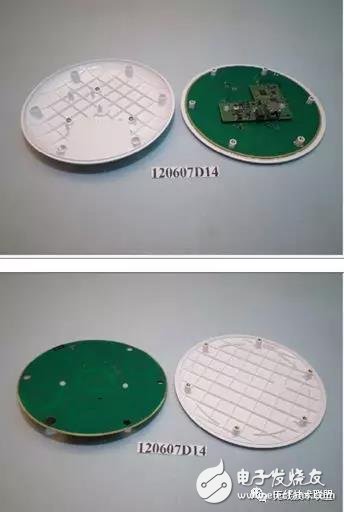
Quuppa接收機拆機天線陣列
4. Bluetooth 5.1 AoA軟件部署
藍牙聯盟在5.1協議中為AoA協議在邏輯鏈路層(LL)做了相應規范。
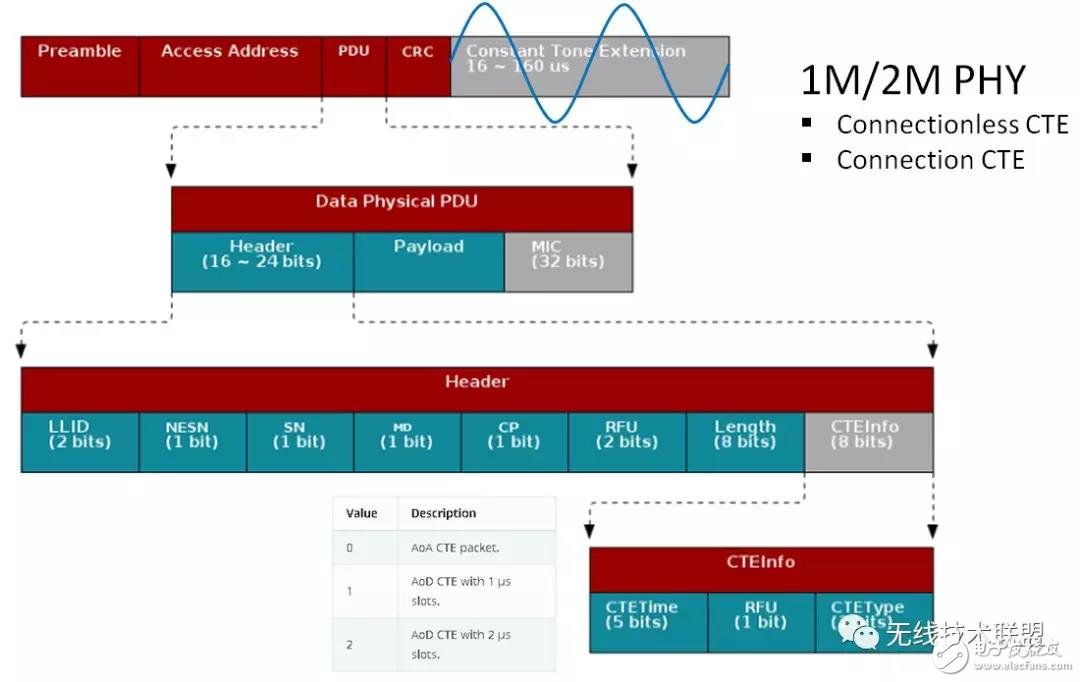
AoA/AoD可以在1M或者2M常規PHY下工作(不支持編碼PHY),支持廣播模式和連接模式兩種類型。數據傳輸格式做了如下要求:在PDU數據包中,規范了AoA/AoD規范,CTE是AoA/AoD數據包的擴展數據,持續時常16-160us,250khz信號調制在載波之上,無白化,無CRC效驗,該信號用于接收機RX在t時間采樣信號I/Q值,計算相位差使用。
5. AoA設計挑戰
信號反射干擾
上文討論是在理想情況下,空曠距離,無其他信號干擾,現實使用場景中RX接收機會接收到自己或者其他aoa becaon信號反射信號,該信號同樣攜帶CTE擴展數據包,但是屬于噪聲信號需要消除。
開關時間補償
一個RF內核控制多路RF天線,除信號在空氣介質傳輸的時間,RF開關切換時間需要考慮在內加以補償。
角度值誤差
測量必有誤差,該誤差范圍通常在3%-5%,需要靠算法降低誤差。
6. AoA角度測量芯片供應商
-
藍牙
+關注
關注
114文章
5830瀏覽量
170463 -
室內定位
+關注
關注
30文章
302瀏覽量
36534
發布評論請先 登錄
相關推薦
室內定位市場深度剖析, UWB定位技術或將成為主流
為什么UWB定位技術可用于室內定位?
基于UWB技術的室內定位方法簡述
室內定位技術有哪些_七大室內定位技術詳解
九種室內定位技術概覽 室內定位技術的原理和應用場景





 工商網監
工商網監
評論