") 一種基于雙路飛行時(shí)間測(cè)距方法來(lái)減小時(shí)鐘偏移誤差的解決方案
一種基于雙路飛行時(shí)間測(cè)距方法來(lái)減小時(shí)鐘偏移誤差的解決方案
摘要:
針對(duì)超寬帶室內(nèi)定位系統(tǒng)中的測(cè)量誤差較大問(wèn)題,提出了一種基于雙路飛行時(shí)間測(cè)距方法來(lái)減小時(shí)鐘偏移誤差的解決方案。本方案針對(duì)靜態(tài)和動(dòng)態(tài)的待測(cè)節(jié)點(diǎn)的運(yùn)動(dòng)特性,通過(guò)對(duì)待測(cè)節(jié)點(diǎn)的運(yùn)動(dòng)狀態(tài)檢測(cè),提出了一種聯(lián)合算法,其中,靜態(tài)定位采用了最小二乘估算法來(lái)得出節(jié)點(diǎn)坐標(biāo),并通過(guò)MATLAB仿真顯示該節(jié)點(diǎn)坐標(biāo)位置;對(duì)于動(dòng)態(tài)跟蹤問(wèn)題,由于物體遮擋和運(yùn)動(dòng)軌跡等因素導(dǎo)致最小二乘法無(wú)法準(zhǔn)確估計(jì)節(jié)點(diǎn)位置,針對(duì)這一問(wèn)題,利用擴(kuò)展卡爾曼濾波算法跟蹤預(yù)測(cè)待測(cè)節(jié)點(diǎn)位置,從而改善定位效果。仿真結(jié)果表明,靜態(tài)定位誤差可以控制在6%以內(nèi),對(duì)比靜態(tài)定位采樣,動(dòng)態(tài)跟蹤算法精度提高了20%。實(shí)驗(yàn)證明,該算法可靠有效,滿足室內(nèi)定位的基本需求。
0 引言
隨著現(xiàn)代科學(xué)技術(shù)的發(fā)展,通信和導(dǎo)航技術(shù)已經(jīng)在各個(gè)領(lǐng)域發(fā)揮巨大的作用,人們對(duì)位置服務(wù)的需求也越來(lái)越大[1]。在室外環(huán)境下,全球定位系統(tǒng)(Global Positioning System,GPS)是在室外定位采用的解決方案,定位精度一般為10 m以上[2]。在室內(nèi)環(huán)境下,GPS無(wú)法解決定位問(wèn)題,超寬帶(Ultra-Wide Band,UWB)技術(shù)作為室內(nèi)定位技術(shù)之一,有精度高、功耗低、抗干擾能力強(qiáng)等特點(diǎn),被廣泛應(yīng)用于室內(nèi)定位領(lǐng)域[3]。基于測(cè)距的定位方法有以下幾種:到達(dá)時(shí)間差法(Time Difference 0f Arrival,TDOA)、飛行時(shí)間法(Time Of Flight,TOF)、到達(dá)角度法(Angle Of Arrival,AOA)[4],測(cè)量節(jié)點(diǎn)間的距離或角度信息,然后使用三邊測(cè)量法、三角測(cè)量法或最小二乘法計(jì)算節(jié)點(diǎn)位置[5]。在以往的研究中,多通過(guò)優(yōu)化算法計(jì)算過(guò)程(例如Taylor算法、Fang算法、Chan算法[6])來(lái)提高定位的精度。本文通過(guò)運(yùn)動(dòng)檢測(cè)的方式來(lái)區(qū)分待測(cè)節(jié)點(diǎn)的運(yùn)動(dòng)狀態(tài),提出了一種聯(lián)合算法,采用雙路飛行時(shí)間的測(cè)距方法提高測(cè)距精度,最小二乘法(Least Square,LSE)來(lái)求解最佳節(jié)點(diǎn)位置,最后聯(lián)合擴(kuò)展卡爾曼濾波器(Extended Kalman Filter,EFK)來(lái)跟蹤節(jié)點(diǎn)的運(yùn)動(dòng)軌跡,并通過(guò)MATLAB仿真來(lái)驗(yàn)證算法的可靠性。
1 UWB測(cè)距原理
UWB系統(tǒng)發(fā)射的信號(hào)采用的是無(wú)載波窄脈沖,該窄脈沖的寬度一般僅為數(shù)個(gè)納秒甚至數(shù)十皮秒的數(shù)量級(jí),這使得UWB信號(hào)具有很寬的頻譜[7],可高達(dá)幾GHz,所以功率譜密度會(huì)很小,以上特征使得它與傳統(tǒng)連續(xù)無(wú)線電信號(hào)的系統(tǒng)不同[8]。UWB定位原理:首先測(cè)量基站與標(biāo)簽之間的距離,再由算法去求解標(biāo)簽的位置坐標(biāo)。本文利用雙路飛行時(shí)間法(Two Way-Time Of Flight,TW-TOF)進(jìn)行測(cè)距,并提出一種聯(lián)合算法求解標(biāo)簽位置。
1.1 飛行時(shí)間測(cè)距法
TOF測(cè)距方法需兩節(jié)點(diǎn)間的協(xié)作通信,記錄UWB信號(hào)在節(jié)點(diǎn)間的往返時(shí)間[9],其測(cè)距過(guò)程如圖1所示。
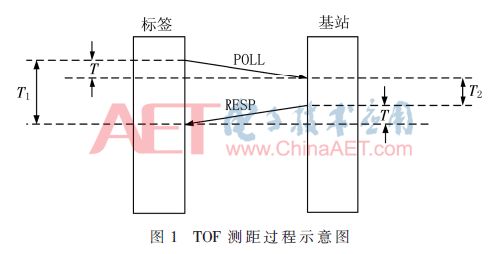
標(biāo)簽向基站發(fā)送一個(gè)輪詢信息POLL,當(dāng)標(biāo)簽收到時(shí),會(huì)立即回復(fù)一個(gè)確認(rèn)RESP來(lái)響應(yīng)這個(gè)數(shù)據(jù)包。標(biāo)簽記錄從發(fā)送數(shù)據(jù)包到接收確認(rèn)的時(shí)間T1;基站記錄了從收到數(shù)據(jù)包到回應(yīng)的時(shí)間T2,那么基站到標(biāo)簽的距離d就可以表示為:
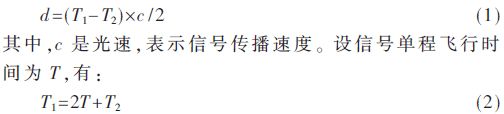
式(1)是理想狀態(tài)下的測(cè)距公式。在TOF測(cè)距中節(jié)點(diǎn)用各自的時(shí)鐘計(jì)時(shí),兩個(gè)節(jié)點(diǎn)的時(shí)鐘無(wú)法完全同步,導(dǎo)致兩節(jié)點(diǎn)間出現(xiàn)時(shí)鐘偏移,會(huì)造成比較嚴(yán)重的測(cè)距誤差。設(shè)基站的時(shí)鐘偏差為FA,標(biāo)簽的時(shí)鐘偏差為FB,那么可以得到信號(hào)傳輸時(shí)間誤差:
雖然可以選用高穩(wěn)定性的時(shí)鐘來(lái)減小這種誤差的影響,但價(jià)格都比較昂貴,會(huì)提高成本。
1.2 雙路飛行時(shí)間測(cè)距
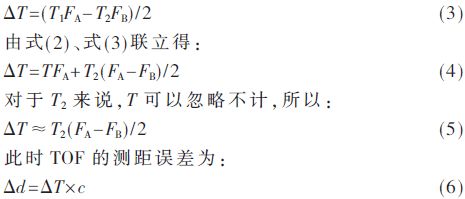
對(duì)于TOF測(cè)距法中節(jié)點(diǎn)間的時(shí)鐘偏移而使測(cè)距誤差增大的問(wèn)題,本文利用的雙路飛行時(shí)間測(cè)距法是在其基礎(chǔ)上進(jìn)行改進(jìn)的一種測(cè)距方法。其具體過(guò)程如圖2所示。
第一階段:與TOF測(cè)距法相同,得到兩個(gè)時(shí)間T1、T2。第二階段:標(biāo)簽接收到RESP后,再向基站發(fā)出一個(gè)FINAL消息,設(shè)從接收到RESP到發(fā)出FINAL的時(shí)間為T(mén)3。第三階段:基站接收到FINAL后,就可以得到從發(fā)出RESP到接收到FINAL消息所用時(shí)間T4。如果按照理想TOF測(cè)距法,基站和標(biāo)簽時(shí)鐘完全同步,T1=T4,T3=T2,可得:

但實(shí)際上節(jié)點(diǎn)之間的時(shí)鐘無(wú)法同步,所以利用TW-TOF的測(cè)距方法可以更好地控制測(cè)距帶來(lái)的誤差,從而提高定位精度。根據(jù)上述得到的幾個(gè)時(shí)間,由式(8)可以求出UWB信號(hào)的單程飛行時(shí)間T。

由此看出,TW-TOF測(cè)距大大降低了時(shí)鐘頻率偏差引起的測(cè)距誤差。如果選用低頻偏的晶體如±10×10-6Hz,可進(jìn)一步降低測(cè)距理論誤差至±0.2 m。
2 最小二乘法靜態(tài)定位
2.1 最小二乘法
經(jīng)過(guò)TW-TOF測(cè)距得到各個(gè)基站與標(biāo)簽的距離di,同時(shí)各個(gè)基站A0、A1、A2、A3的坐標(biāo)是已知的(Xi,Yi),那么就可以得到方程組:
其中:
2.2 最小二乘法靜態(tài)定位仿真
本次仿真使用的仿真軟件為MATLAB 2014b,計(jì)算機(jī)配置如下:系統(tǒng)環(huán)境為Windows 7 64位,CPU采用Intel CoreTMi3-3220,CPU頻率為3.30 GHz,內(nèi)存為DDR3 8 GB。4個(gè)參與定位的基站坐標(biāo)分別為(0,0)、(0,100)、(100,0)、(100,100),標(biāo)簽的真實(shí)坐標(biāo)為(44,37),最小二乘法得到的仿真結(jié)果用圓圈來(lái)表示,在測(cè)試中加入了隨機(jī)測(cè)距誤差。算法仿真運(yùn)行100次以后的結(jié)果如圖3所示。
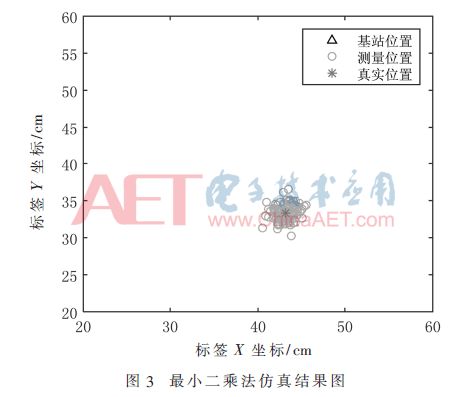
由圖3中的仿真結(jié)果可以看到,最小二乘法得到的定位結(jié)果基本上分布在標(biāo)簽的真實(shí)坐標(biāo)周圍,說(shuō)明此定位算法有效。為了更加直觀地評(píng)價(jià)算法的表現(xiàn),使用均方根誤差(Root Mean Square Error,RMSE)來(lái)分析定位誤差,如式(15)所示:
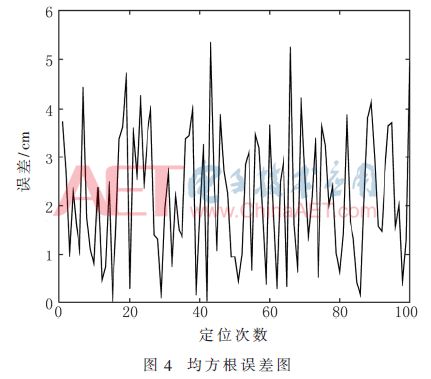
由圖4可以看出,利用最小二乘法來(lái)進(jìn)行待測(cè)節(jié)點(diǎn)的靜態(tài)定位,定位結(jié)果誤差控制在6%以內(nèi),精確度符合預(yù)期結(jié)果,說(shuō)明此算法是有效的。
3 擴(kuò)展卡爾曼濾波動(dòng)態(tài)定位
最小二乘法可以估測(cè)到靜態(tài)節(jié)點(diǎn)的位置,但是對(duì)于移動(dòng)的標(biāo)簽,在實(shí)際測(cè)量中由于物體或人體造成多徑傳播和非視距誤差,會(huì)導(dǎo)致定位誤差較大。卡爾曼濾波器利用上一時(shí)刻的位置信息和這一時(shí)刻的觀測(cè)信息對(duì)位置進(jìn)行估計(jì)[10]。
3.1 擴(kuò)展卡爾曼濾波器
傳統(tǒng)卡爾曼濾波器只能在線性高斯模型中使用,而運(yùn)動(dòng)標(biāo)簽定位問(wèn)題的模型是非線性的,那么可以使用擴(kuò)展卡爾曼濾波器,用非線性函數(shù)的局部線性特征來(lái)近似非線性。其過(guò)程包括兩個(gè)階段:預(yù)測(cè)和更新[11]。
上式兩個(gè)方程分別是對(duì)k時(shí)刻狀態(tài)向量和估計(jì)誤差的協(xié)方差的預(yù)測(cè),Q(k)是系統(tǒng)誤差的協(xié)方差。由于h(s(k))是非線性函數(shù),在使用能解決非線性問(wèn)題的擴(kuò)展卡爾曼濾波時(shí),使用泰勒級(jí)數(shù)展開(kāi)來(lái)簡(jiǎn)化表達(dá)式。在k-1時(shí)刻向k時(shí)刻轉(zhuǎn)換時(shí),H(k)是h(s(k))的雅克比矩陣,即求導(dǎo)化簡(jiǎn)后得:
設(shè)ω(k)和v(k)的協(xié)方差陣分別為Q(k)和R(k),都為對(duì)角矩陣,列數(shù)為2,維數(shù)是基站個(gè)數(shù),對(duì)角線上各元素取值在仿真中分別設(shè)為定位坐標(biāo)最大誤差的一半和其相應(yīng)的測(cè)量方差。
3.2 動(dòng)態(tài)定位仿真
為了體現(xiàn)擴(kuò)展卡爾曼濾波在動(dòng)態(tài)定位中的特性,在仿真中把它與靜態(tài)定位算法經(jīng)過(guò)時(shí)間采樣后的結(jié)果進(jìn)行對(duì)比,用MATLAB進(jìn)行仿真,設(shè)置4個(gè)基站,分布在(0,0)、(0,1000)、(1000,0)、(1000,1000)處,本文測(cè)試的動(dòng)態(tài)過(guò)程是從(0,500)處開(kāi)始,來(lái)測(cè)試對(duì)動(dòng)態(tài)節(jié)點(diǎn)的跟蹤效果。時(shí)間采樣周期為0.1 s,根據(jù)擴(kuò)展卡爾曼濾波器原理,只需知道初值即可,仿真結(jié)果如圖5所示。
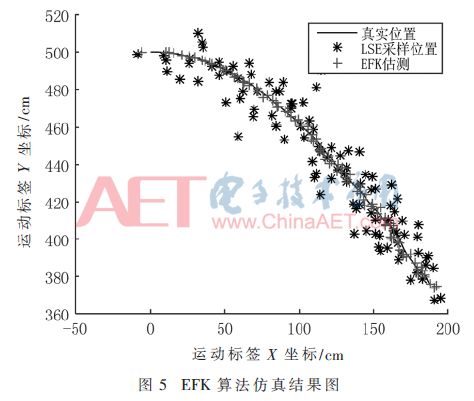
由圖5中可見(jiàn),最小二乘法靜態(tài)采樣測(cè)量出的位置和經(jīng)過(guò)EFK估測(cè)后形成的軌跡相比,經(jīng)過(guò)EKF估測(cè)后的移動(dòng)節(jié)點(diǎn)的坐標(biāo)更接近真實(shí)的運(yùn)動(dòng)軌跡,說(shuō)明了擴(kuò)展卡爾曼濾波能更好地對(duì)運(yùn)動(dòng)中的標(biāo)簽進(jìn)行位置估計(jì)。接下來(lái)為了更直觀地顯示擴(kuò)展卡爾曼濾波的動(dòng)態(tài)定位效果,對(duì)比分析仿真結(jié)果的 RMSE,結(jié)果如圖6所示。
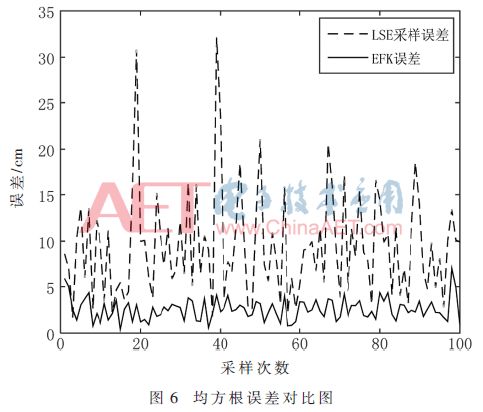
圖6中靜態(tài)算法采樣后的RMSE為波動(dòng)較大的虛線,經(jīng)過(guò)EFK算法估測(cè)后的RMSE為波動(dòng)較小的實(shí)線,誤差從25%以內(nèi)穩(wěn)定到了5%左右,比較直觀地體現(xiàn)出了擴(kuò)展卡爾曼濾波算法的有效性。
4 系統(tǒng)工作流程
4.1 運(yùn)動(dòng)狀態(tài)檢測(cè)
聯(lián)合算法的應(yīng)用需要了解標(biāo)簽的運(yùn)動(dòng)狀態(tài),所以設(shè)計(jì)了運(yùn)動(dòng)狀態(tài)檢測(cè)方法。設(shè)(xt,yt)為t時(shí)刻最小二乘法靜態(tài)定位采樣所得的位置,假設(shè)系統(tǒng)最大誤差為σ,那么就可以通過(guò)以下的公式來(lái)檢測(cè)運(yùn)動(dòng)狀態(tài):

式中,k是每個(gè)測(cè)量序列的時(shí)刻,開(kāi)始定位后每個(gè)測(cè)量時(shí)刻都與t時(shí)刻的位置比較。當(dāng)式(24)成立時(shí),檢測(cè)到標(biāo)簽的運(yùn)動(dòng)狀態(tài)為靜止,相反,當(dāng)式(25)成立時(shí),也就是說(shuō)在t+k時(shí)刻與t時(shí)刻的距離超過(guò)了最大誤差一定的倍數(shù),那么就判斷標(biāo)簽是運(yùn)動(dòng)的。經(jīng)過(guò)多次仿真,最后仿真中所取的最大誤差為σ=0.2 m,誤差系數(shù)λ=2。為了防止標(biāo)簽在臨界狀態(tài)下頻繁波動(dòng)的情況,定義一個(gè)變量N來(lái)記錄檢測(cè)次數(shù),只有當(dāng)N》3時(shí),也就是連續(xù)3次檢測(cè)為運(yùn)動(dòng)時(shí),才能真正判定為運(yùn)動(dòng)狀態(tài)。用此時(shí)刻的最小二乘靜態(tài)定位的結(jié)果作為擴(kuò)展卡爾曼濾波算法的初值,來(lái)繼續(xù)對(duì)標(biāo)簽進(jìn)行動(dòng)態(tài)跟蹤定位。
4.2 聯(lián)合算法工作流程
由上文所述的聯(lián)合算法的推導(dǎo)和仿真,最小二乘法聯(lián)合擴(kuò)展卡爾曼濾波定位算法的運(yùn)算流程如圖7所示。

5 結(jié)論
本文介紹了雙路飛行時(shí)間(TW-TOF)測(cè)距法,能夠降低時(shí)鐘偏移所帶來(lái)的測(cè)距誤差,并提出了一種最小二乘靜態(tài)定位聯(lián)合擴(kuò)展卡爾曼濾波動(dòng)態(tài)定位算法。對(duì)于靜態(tài)定位采用了最小二乘估算法進(jìn)行對(duì)待測(cè)節(jié)點(diǎn)定位,仿真結(jié)果表明,此算法的定位誤差能控制在6%以內(nèi);對(duì)移動(dòng)的待測(cè)節(jié)點(diǎn)進(jìn)行動(dòng)態(tài)定位時(shí),采用了擴(kuò)展卡爾曼濾波器,對(duì)運(yùn)動(dòng)軌跡進(jìn)行預(yù)測(cè)跟蹤,并通過(guò)MATLAB仿真對(duì)比表明,相對(duì)于靜態(tài)定位采樣,擴(kuò)展卡爾曼濾波算法的誤差降低了20%,定位效果更好。接下來(lái)還可以通過(guò)增加基站數(shù)量和合理的基站分布位置來(lái)提高定位精度。在算法上也有優(yōu)化的可能,把非線性問(wèn)題轉(zhuǎn)化為線性問(wèn)題的過(guò)程中,泰勒展開(kāi)式中取更多的項(xiàng),通過(guò)提高算法復(fù)雜度來(lái)提高精度。
參考文獻(xiàn)
[1] 董家志。基于UWB的室內(nèi)定位與跟蹤算法的研究[D]。成都:電子科技大學(xué),2015.
[2] 盧靖宇,余文濤,趙新,等。基于超寬帶的移動(dòng)機(jī)器人室內(nèi)定位系統(tǒng)設(shè)計(jì)[J]。電子技術(shù)應(yīng)用,2017,43(5):25-28.
[3] MATTEO R,SAMUEL V D,V,HEIDI S,et al.Analysis of the scalability of UWB indoor localization solutions for high user densities[J].Sensors,2018,18(6):1875-1880.
[4] 孫鳳,施偉斌,黃靈鳳。基于無(wú)線傳感器網(wǎng)絡(luò)的室內(nèi)定位技術(shù)的研究[J]。電子技術(shù)應(yīng)用,2013,39(10):80-83.
[5] MCELROY C,NEIRYNCK D,MCLAUGHLIN M.Comparison of wireless clock synchronization algorithms for indoor location systems[C].Proceedings of 2014 IEEE International Conference on Communications Workshops.Sydney.IEEE,2014:157-162.
[6] LI X,HE D,JIANG L,et al.A method indoor multi-path IR-UWB location based on multi-task compressive sensing[C].Fourth International Conference on Ubiquitous Positioning.IEEE,2017:64-68.
[7] HEWISH M.Ultra-wideband technology opens up new horizons[J].Janes International Defense Review Idr,1999,2:20-22.
[8] 梁久禎。無(wú)線定位系統(tǒng)[M]。北京:電子工業(yè)出版社,2013.
[9] 魯旭陽(yáng)。基于TOF的WSN節(jié)點(diǎn)定位技術(shù)研究[D]。鄭州:解放軍信息工程大學(xué),2012.
[10] 嵇茂祥.UWB室內(nèi)定位系統(tǒng)研究與實(shí)現(xiàn)[D]。上海:華東師范大學(xué),2017.
[11] 師延山,李道本,范躍祖。無(wú)線定位擴(kuò)展卡爾曼濾波算法的優(yōu)化[J]。北京航空航天大學(xué)學(xué)報(bào),2003,29(4):308-311.
-
算法
+關(guān)注
關(guān)注
23文章
4620瀏覽量
93049 -
UWB
+關(guān)注
關(guān)注
32文章
1101瀏覽量
61237 -
無(wú)線電
+關(guān)注
關(guān)注
60文章
2144瀏覽量
116597
原文標(biāo)題:【學(xué)術(shù)論文】基于超寬帶室內(nèi)定位聯(lián)合算法的研究
文章出處:【微信號(hào):ChinaAET,微信公眾號(hào):電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
重磅新品 | 美芯晟發(fā)布全集成直接飛行時(shí)間(dToF)傳感器MT3801

一種面向飛行試驗(yàn)的數(shù)據(jù)融合框架

集成時(shí)間數(shù)字轉(zhuǎn)換器簡(jiǎn)化了飛行時(shí)間測(cè)距應(yīng)用的設(shè)計(jì)

飛行時(shí)間和激光雷達(dá) - 光學(xué)前端設(shè)計(jì)應(yīng)用說(shuō)明

艾邁斯歐司朗發(fā)布新一代單區(qū)直接飛行時(shí)間(dToF)傳感器TMF8806
激光測(cè)距傳感器輸出什么信號(hào)
時(shí)鐘抖動(dòng)和時(shí)鐘偏移的區(qū)別
OPT8241 3D飛行時(shí)間傳感器數(shù)據(jù)表
TDC7201適用于激光雷達(dá)、測(cè)距儀和ADAS中飛行時(shí)間應(yīng)用的時(shí)間-數(shù)字轉(zhuǎn)換器數(shù)據(jù)表
減小系統(tǒng)穩(wěn)態(tài)誤差的方法有哪些?
直接飛行時(shí)間(dToF) SiPM LiDAR 平臺(tái)SECO-測(cè)距儀-GEVK數(shù)據(jù)手冊(cè)

讓單片機(jī)電子時(shí)鐘走時(shí)更精確的方法
多區(qū)飛行時(shí)間(ToF)傳感器的特點(diǎn)

混合ToF彌補(bǔ)單一ToF不足實(shí)現(xiàn)全面深度傳感
飛行時(shí)間傳感器:技術(shù)原理與多元應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論