


步驟1:所需的組件和連接
1。超聲波傳感器(hc-sr04)
2。 led
3.resistor(您希望與led一起使用)
4。 Arduino的
5。跳線
連接非常簡單,超聲波傳感器有4個引腳,分別是:trig,echo,vcc,gnd與arduino連接。
回聲引腳與arduino數字連接引腳5和傳感器的觸發引腳連接到Arduino的數字引腳13。 Vcc從arduino連接到5V,傳感器的gnd引腳連接到arduino的gnd引腳。
led的引腳連接到引腳2(led的+),而陰極的陰極(-) LED將通過低電阻接地。
步驟2:代碼和理解傳感器的工作
代碼非常簡單,可以檢測傳感器前方(眼睛側)是否存在物體)并發光,直到將物體從傳感器上移開(此處約50厘米)。
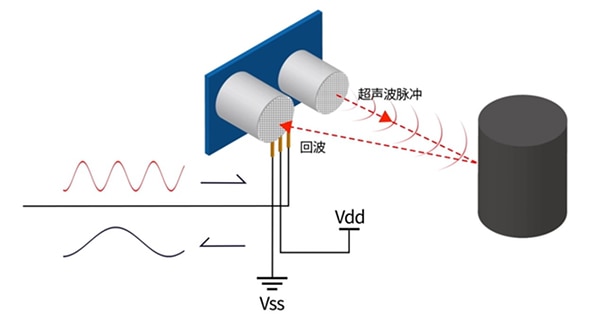
傳感器的工作原理是“回聲定位”,是的,它允許蝙蝠和鯨魚看見。使用arduino從傳感器觸發針產生波(脈沖),并且在將物體撞擊到回波針上之后,脈沖會返回到傳感器,如果檢測到物體,則該信號會傳輸數字(0,1),并且物體與物體之間的距離約為
在我們的程序中,持續時間為1ms的傳感器會產生觸發波,即脈沖寬度為1ms,這是通過使用pulseIn()函數獲取并保存在可變持續時間。脈沖以大約340m/s的聲速傳播,持續時間是波到達物體所需時間的兩倍(因為它回彈然后通過回波針記錄),因此距離將是持續時間*速度。
根據src-04的數據表,該距離是將持續時間除以29.1的一半,以執行代碼中給出的上述步驟,該步驟也取自codebender https://codebender.cc/sketch:242411# Ultrasonic%20w 。..
這是一個了解src-04傳感器工作的鏈接http://howtomechatronics.com/tutorials/arduino/ult 。..
責任編輯:wv
-
超聲波傳感器
+關注
關注
18文章
610瀏覽量
36951
發布評論請先 登錄
英飛凌推出新型超聲波傳感器,開拓全新應用領域
倍加福發布USi-industry超聲波傳感器系統
汽車超聲波傳感器 SNS409替代E524.09 (性能對比)






 工商網監
工商網監

評論