") 如何使用Raspberry Pi 2將舊的RC汽車轉(zhuǎn)換為可在WiFi或Internet上工作
如何使用Raspberry Pi 2將舊的RC汽車轉(zhuǎn)換為可在WiFi或Internet上工作
第1步:我們需要的組件
舊遙控車
Raspberry Pi 2板
Raspberry Pi 2盒
散熱器x 2
Micro SDHC卡
Edimax無(wú)線適配器
L298N電動(dòng)機(jī)驅(qū)動(dòng)控制器雙H橋
每個(gè)Mini Y5 6000mAH電池組
跳線x 16
HDMI電纜(可選)
HDMI監(jiān)視器(可選)
電阻x 2
LED的x 4
步驟2:連接Pi和組件
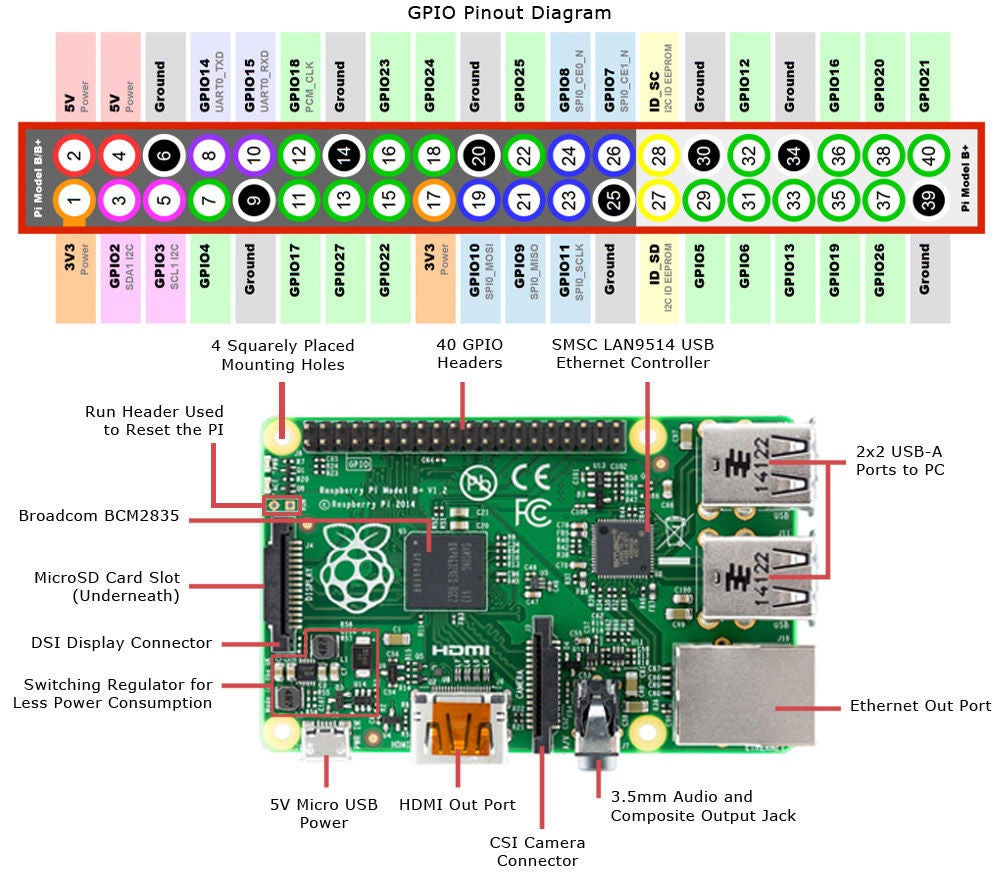
《為了正確完成接線,我們需要了解Raspberry Pi 2 GPIO引腳,該引腳用于將各種組件連接到Pi。這些引腳將信號(hào)發(fā)送到連接的組件,這些組件可以打開(kāi)燈以驅(qū)動(dòng)電動(dòng)機(jī)或從溫度或接近傳感器讀取數(shù)據(jù)。
綠色突出顯示的是17個(gè)基本GPIO引腳,這就是我們將在項(xiàng)目中使用的東西。這些引腳可以配置為輸入或輸出模式。
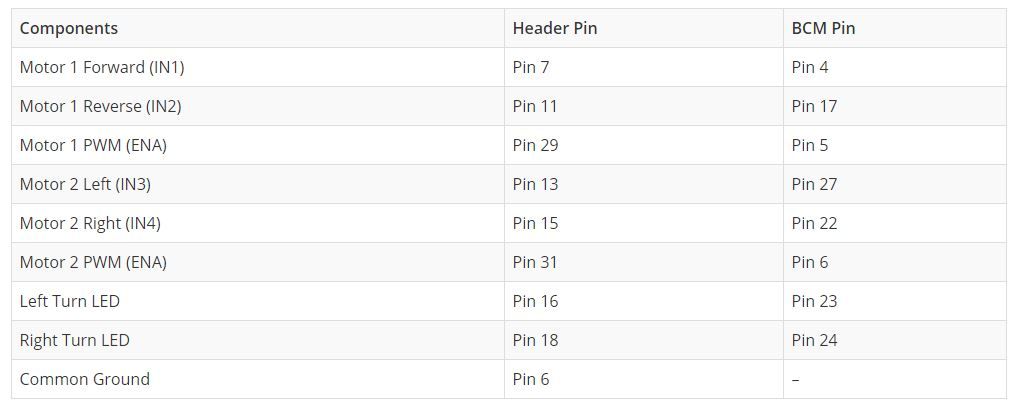
我連接了2組LED的陽(yáng)極(+ ve),用于左右轉(zhuǎn)向信號(hào),每個(gè)LED都有一個(gè)330Ω電阻。電阻有助于將流過(guò)LED的電流保持在正確的水平,否則您可能會(huì)很快燒壞LED。
步驟3:連接Pi和L298N電機(jī)驅(qū)動(dòng)控制器
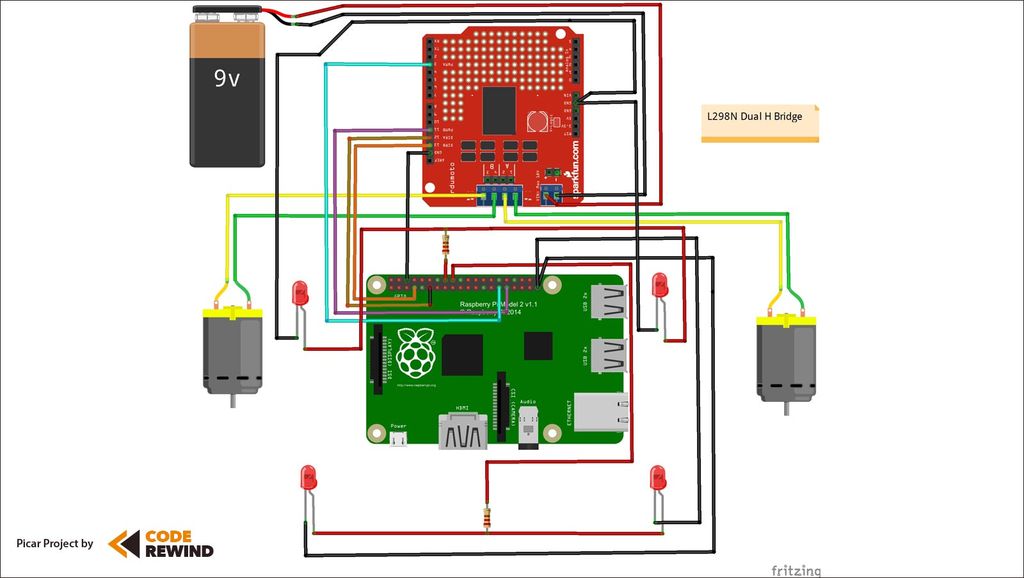
如果查看上述布線,您會(huì)注意到我將9V電源連接到L298N Dual H橋,這將進(jìn)一步為9V電動(dòng)機(jī)供電。現(xiàn)在,您可能會(huì)問(wèn)為什么我需要這個(gè)附加組件來(lái)為電動(dòng)機(jī)供電。我可以將電機(jī)連接到Raspberry Pi GPIO引腳嗎?答案是肯定的。我們之所以依賴電動(dòng)機(jī)驅(qū)動(dòng)控制器,是因?yàn)樗梢蕴幚韮膳_(tái)最高35V的電動(dòng)機(jī)。 Raspberry Pi僅發(fā)送最大3.3V作為其高信號(hào)。它不僅提供足夠的功率,而且如我之前所述控制方向和速度。
L298N電機(jī)驅(qū)動(dòng)控制器雙H橋是我的Raspberry Pi WiFi RC Car的關(guān)鍵組件,它為所有電機(jī)供電并發(fā)送信號(hào)控制電動(dòng)機(jī)的方向和速度。該控制器可通過(guò)PWM(脈沖寬度調(diào)制)信號(hào)驅(qū)動(dòng)2個(gè)電機(jī)。 PWM本身就是一個(gè)廣泛的話題,因此我們?cè)谶@里不做介紹。可以將其視為一種控制所需功率的技術(shù)。
步驟4:所需軟件
Raspbian Wheezy(這是Linux OS的味道)– http://bit.ly/1KWbtrE
WiringPi(用于查看所有GPIO)– http://bit.ly/1DIFwkR
WebIOPi(用于開(kāi)發(fā)Web應(yīng)用程序)– http://bit.ly/1GsnctO
編織的IoT套件(用于從任何地方控制設(shè)備)– http://bit.ly/1TQ5UlR
Fritzing –(用于創(chuàng)建接線圖)– http://bit.ly/1jOBcTZ
PiCar腳本(這是我的自定義腳本和UI文件)– http://bit。 ly/1jKk87n
步驟5:安裝必備軟件
格式SD卡并使用Noobs或直接安裝Raspbian Wheezy – https://www.raspberrypi.org/help/noobs-setup/
使用Rob Seder的腳本更新Raspberry Pi
安裝WiFi適配器并連接到無(wú)線設(shè)備網(wǎng)絡(luò)
現(xiàn)在使用以下命令安裝WiringPi
sudo apt-get install git-core
sudo git clone git://git.drogon.net/wiringPi
cd wiringPi
sudo git pull origin
sudo 。/build
要使用WiringPi幫助您進(jìn)行正確的GPIO連接,請(qǐng)鍵入以下命令 》
gpio -v
gpio readall
要安裝WebIOPi,請(qǐng)輸入以下命令
$ sudo wget http://sourceforge.net/projects/webiopi/files/Web.。.
$ sudo tar xv*** WebIOPi-x.y.z.tar.gz
$ cd WebIOPi-x.y.z
$ sudo 。/setup.sh
步驟6:配置WebIOPi和編織
所需的基本配置是通過(guò)使用以下命令在HTTP部分下編輯配置文件來(lái)告訴我們自定義python腳本將駐留在何處。
$ sudo nano /etc/webiopi/config
//Edit this section of the config, mainly the doc-root and welcome-file attributes.
[HTTP]
enabled = true
port = 8000
doc-root = /home/pi/picar
welcome-file = index.html
以詳細(xì)輸出和默認(rèn)配置文件啟動(dòng)webiopi服務(wù)。建議在開(kāi)發(fā)和調(diào)試腳本時(shí)使用。
$ sudo webiopi -d -c /etc/webiopi/config
您還可以啟動(dòng)/停止后臺(tái)服務(wù),配置將從/etc/webiopi/config加載。
$ sudo /etc/init.d/webiopi start
$ sudo /etc/init.d/webiopi stop
//To check if the service is running or not
$ sudo /etc/init.d/webiopi status
構(gòu)建完項(xiàng)目后,應(yīng)在Pi啟動(dòng)時(shí)將此服務(wù)設(shè)置為自動(dòng)啟動(dòng)。要在啟動(dòng)時(shí)管理服務(wù),請(qǐng)使用以下命令。
//To setup your system to start webiopi at boot:
$ sudo update-rc.d webiopi defaults
//To remove webiopi start from boot:
$ sudo update-rc.d webiopi remove
步驟7:構(gòu)建用戶界面

要通過(guò)本地網(wǎng)絡(luò)訪問(wèn)pi,請(qǐng)打開(kāi)瀏覽器,然后從網(wǎng)絡(luò)中的任何設(shè)備導(dǎo)航到 http://ipAddressOfPi:8000/。確保在URL中鍵入Pi的IP地址。默認(rèn)用戶“ webiopi ”和密碼為“ raspberry ”。
UI幾乎是一個(gè)基本的HTML頁(yè)面,其圖像映射了方向和停止命令連接到onmousedown事件。然后將這些事件映射到webiopi框架公開(kāi)的python宏。
步驟8:結(jié)論
我希望您喜歡本教程,并希望嘗試建立一些有趣的東西。讓我知道您對(duì)這個(gè)項(xiàng)目的看法。我進(jìn)一步計(jì)劃在此項(xiàng)目中添加以下功能。
添加遙測(cè)支持–包括讀取溫度,電動(dòng)機(jī)速度,實(shí)時(shí)電池狀態(tài)
電池電量不足通知
集成Pi攝像頭模塊
消除UI滯后并提高響應(yīng)速度
允許設(shè)備加速度計(jì)
責(zé)任編輯:wv
-
Internet
+關(guān)注
關(guān)注
0文章
400瀏覽量
36846 -
WIFI
+關(guān)注
關(guān)注
81文章
5297瀏覽量
203604 -
遙控車
+關(guān)注
關(guān)注
9文章
81瀏覽量
23713 -
樹(shù)莓派
+關(guān)注
關(guān)注
116文章
1707瀏覽量
105611
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Raspberry Pi樹(shù)莓派新手指南
Banana Pi BPI-CanMV-K230D-Zero :AIoT 應(yīng)用的 Kendryte K230D RISC-V
新品來(lái)襲!Raspberry Pi Compute Module 5
Raspberry Pi Pico 2 W 發(fā)布
Raspberry Pi Pico 2
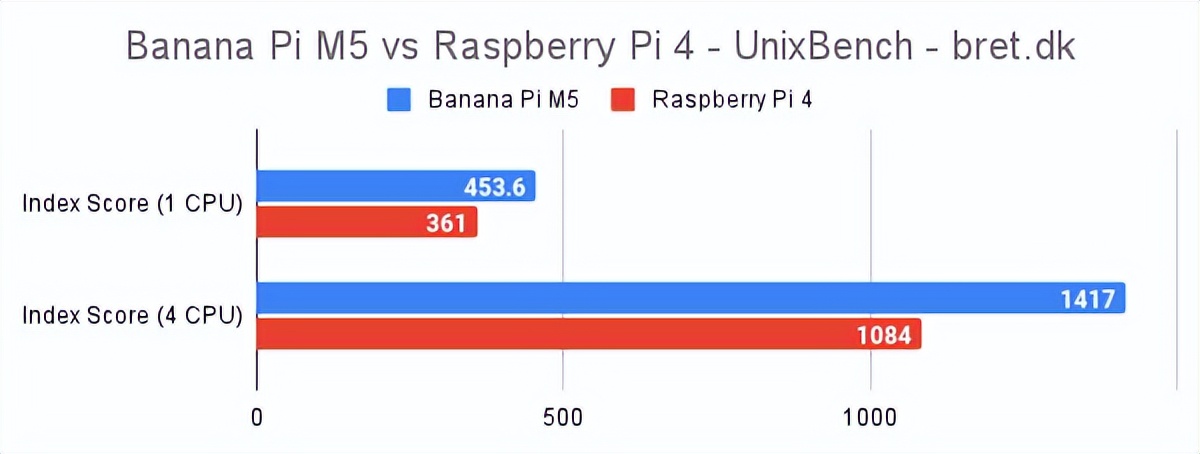
Banana Pi M5 與 Raspberry Pi 4 – 基準(zhǔn)測(cè)試
e絡(luò)盟開(kāi)售Raspberry Pi新款產(chǎn)品
e絡(luò)盟開(kāi)售Raspberry Pi AI 攝像頭
e絡(luò)盟發(fā)售功能強(qiáng)大的入門(mén)級(jí) Raspberry Pi 5 2GB

pwm轉(zhuǎn)換為模擬電壓rc電路是什么原理
名單公布!樹(shù)莓派5(Raspberry Pi 5)開(kāi)發(fā)板免費(fèi)試用!!!
如何將CYKIT-028 TFT模塊與Raspberry Pi和ESP32微控制器結(jié)合使用?
5分鐘內(nèi)將Raspberry Pi Pico變成簡(jiǎn)單的示波器+波形發(fā)生器

如何將VCO輸出TTL信號(hào)轉(zhuǎn)換為具有固定幅度的正弦波?
用于室內(nèi)植物或圣誕樹(shù)的 Raspberry Pi Pico 水監(jiān)控器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論