") 如何利用英創(chuàng)ARM9嵌入式主板快速構建雙CAN接口的方案
如何利用英創(chuàng)ARM9嵌入式主板快速構建雙CAN接口的方案
CAN(Controller Area Network)即控制器局域網(wǎng),由于具有高性能、高可靠性以及簡單的網(wǎng)絡結構,在工業(yè)系統(tǒng)中越來越受到人們的重視,并迅速成為了目前國際上應用最廣泛的現(xiàn)場總線之一。
英創(chuàng)提供的EM9000系列ARM9嵌入式主板,包括EM9000、EM9260、EM9360等多種型號,都預裝了正版WinCE操作系統(tǒng),且?guī)в袠藴蔆AN通訊接口。與板上其他標準通訊接口一樣,英創(chuàng)公司為所有EM9000系列嵌入式主板的CAN接口配置了標準的WinCE流式驅(qū)動程序,應用程序可以通過打開文件的進行讀寫的標準方式實現(xiàn)對CAN總線接口的數(shù)據(jù)通訊。本文側(cè)重于介紹CAN通訊接口,下面以EM9000嵌入式主板為例,介紹如何利用英創(chuàng)的ARM9嵌入式主板快速構建雙CAN接口的方案。
硬件組成
英創(chuàng)提供的系列ARM9嵌入式主板,除EM9160嵌入式主板外,所有的ARM9主板上均可直接支持一個CAN接口。ETA701是英創(chuàng)公司提供的基于ISA總線擴展的一個CAN模塊,可以通過ISA總線外接一個ETA701模塊,即可構成一個雙CAN系統(tǒng)。
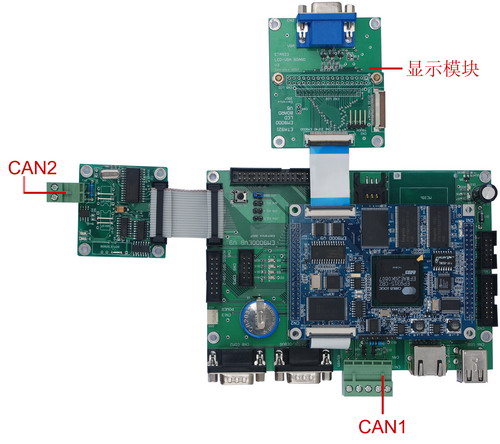
EM9000嵌入式主板和ETA701模塊提供的CAN均采用了PHILIPS半導體公司的SJA1000T CAN總線控制器,SJA1000是一款獨立的控制器,主要用于汽車和一般工業(yè)環(huán)境中的控制器局域網(wǎng)絡(CAN)芯片。它是PHILIPS半導體PCA82C200 CAN控制器(BasicCAN)的替代產(chǎn)品,而且它增加了一種新的工作模式(PeliCAN),這種模式支持具有很多新特性的CAN 2.0B協(xié)議。
EM9000嵌入式主板和ETA701模塊的CAN通訊接口可提供高達1Mbps的數(shù)據(jù)傳輸速率,當采用5Kbps的的數(shù)據(jù)傳輸速率時其通訊距離最高可達到10KM。硬件的錯誤檢定特性也增強了CAN的抗電磁干擾能力,這給數(shù)據(jù)的遠程可靠傳輸提供了有利保證。
在EM9000嵌入式主板和ETA701模塊的CAN通訊接口根據(jù)用戶的需要分為兩種:一種帶光電隔離,一種不帶光電隔離。帶光電隔離CAN總線通訊模塊的CAN收發(fā)器端的所有信號和電源與其它部分完全隔離,可承受至少1Kv(有效值)的電壓沖擊。
CAN接口驅(qū)動函數(shù)
一、CAN報文的幀格式
在CAN2.0B中存在兩種不同的幀格式,其主要的區(qū)別在于標識符的長度,具有11位標識符的幀稱為標準幀,而包括有29位標識符的幀稱為擴展幀。下面分別介紹數(shù)據(jù)幀的格式。
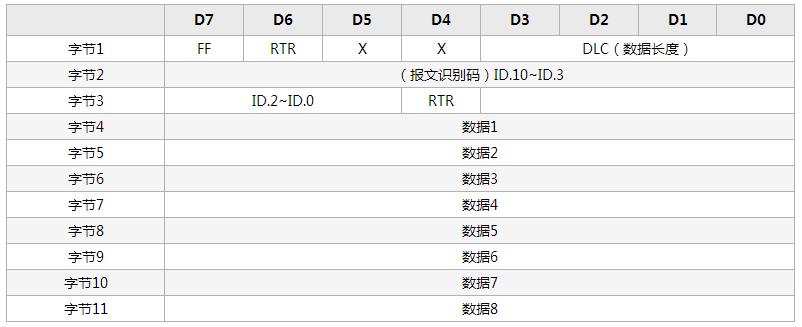
1、CAN2.0B標準幀
CAN標準幀信息為11個字節(jié),包括兩部分:信息和數(shù)據(jù)部分。前3個字節(jié)為信息部分,如圖所示:
注:
1、字節(jié)1為幀信息。D7位表示幀格式,在標準幀中,F(xiàn)F=0;D6位表示幀的類型,RTR=0表示為數(shù)據(jù)幀,RTR=1表示為遠程幀,在一般的數(shù)據(jù)通訊中,只使用數(shù)據(jù)幀;DLC表示數(shù)據(jù)幀實際的數(shù)據(jù)長度。
2、字節(jié)2、字節(jié)3為報文識別碼,11位有效。
3、字節(jié)4~字節(jié)11為數(shù)據(jù)幀的實際數(shù)據(jù),遠程幀時無效。
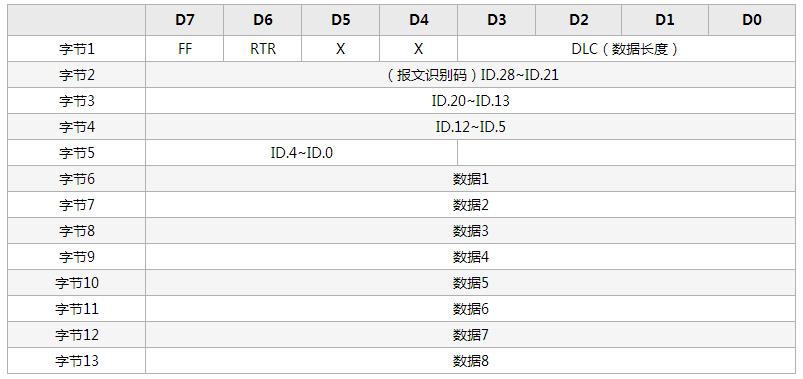
2、CAN2.0B擴展幀
CAN標準幀信息為13個字節(jié),包括兩部分:信息和數(shù)據(jù)部分。前5個字節(jié)為信息部分,如圖所示:
注:
1、字節(jié)1為幀信息。D7位表示幀格式,在擴展幀中,F(xiàn)F=1;D6位表示幀的類型,RTR=0表示為數(shù)據(jù)幀,RTR=1表示為遠程幀;DLC表示數(shù)據(jù)幀實際的數(shù)據(jù)長度。
2、字節(jié)2~字節(jié)5為報文識別碼,29位有效。
3、字節(jié)6~字節(jié)13為數(shù)據(jù)幀的實際數(shù)據(jù),遠程幀時無效。
二、啟動CAN通訊接口
英創(chuàng)公司提供的CAN通訊接口的驅(qū)動程序采用的是WinCE下流式驅(qū)動程序(Stream Device Driver),并在此驅(qū)動程序的基礎上為客戶封裝了一套簡單實用的API函數(shù)。各個函數(shù)的定義在can_api.h文件下,在該頭文件中對于各個API函數(shù)均有相應的中文說明。
作為流式接口函數(shù)通常和文件系統(tǒng)的API函數(shù)(如CreateFile)緊密匹配的,因此在使用英創(chuàng)提供的CAN接口的API函數(shù)時,首先需要調(diào)用CreateFile(…)來獲取CAN接口設備的句柄handle,如使用CAN1通訊口,可以調(diào)用以下函數(shù):
m_hCAN=CreateFile(_T(“CAN1:”), GENERIC_READ|GENERIC_WRITE, 0,NULL, OPEN_EXISTING, 0, NULL);
對于CAN2通訊接口,只需將其中的名稱換成 _T(“CAN2:”)即可。在創(chuàng)建CAN設備得到有效的handle之后,就可以調(diào)用can_api.h中定義的相應函數(shù)來啟動CAN設備接口。
BOOL CAN_StartChip (HANDLE hDevice);
至此CAN通訊接口進入工作模式。
三、設置CAN通訊接口參數(shù)
在進行CAN數(shù)據(jù)通訊之前,需要設置和CAN通訊相關的一些參數(shù),包括CAN通訊的波特率設置以及對接收過濾器的設置。
BOOL CAN_SetBaudRate(HANDLE hDevice, BYTE *index);
// 用于設置CAN通訊的波特率,波特率的設置范圍包括:10kbps~1Mbps。具體的定義請參見can_api.h文件中的注釋說明
通過配置接收過濾器,CAN通訊接口可以實現(xiàn)只接收標識符也接收過濾器預設值相一致的報文。接收過濾器由接收碼寄存器ACRn和接收屏蔽碼寄存器AMRn來定義的,還可以選擇兩種不同的過濾器模式,單過濾器模式或者雙過濾器模式。關于ACR、AMR中各位的定義,請參見SJA1000的數(shù)據(jù)手冊,這里就不再贅述。在英創(chuàng)提供的API函數(shù)中,用戶可以調(diào)用以下函數(shù)來實現(xiàn)接收過濾器的設置:
BOOL CAN_SetGlobalAcceptanceFilter( HANDLE hDevice, BYTE *AcceptanceFilter, BYTE size)
四、CAN通訊接口的數(shù)據(jù)收發(fā)
在英創(chuàng)公司提供的雙CAN方案中,CAN通訊的數(shù)據(jù)收發(fā)均采用的中斷方式,驅(qū)動程序中已自動完成了數(shù)據(jù)的收發(fā),以及內(nèi)部定義的CAN接收緩沖區(qū)和發(fā)送緩沖區(qū)的管理。對于用戶開發(fā)應用程序來說,只需要調(diào)用英創(chuàng)公司提供的CAN通訊API函數(shù)中的收發(fā)函數(shù)即可。下圖為CAN驅(qū)動程序的數(shù)據(jù)流和事件的關系圖。
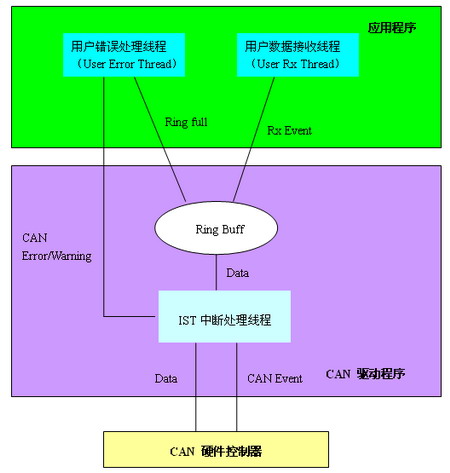
在進行CAN通訊應用程序的開發(fā)時,對于CAN通訊數(shù)據(jù)接收線程可以采用兩種方式:一種可以采用定時查詢,即定時調(diào)用函數(shù)CAN_GetNextReceivedFrame( …)檢測是否有接收到CAN報文數(shù)據(jù);一種可以利用操作系統(tǒng)的消息機制,采用事件響應的方式,一旦硬件接收的數(shù)據(jù)報文,底層的驅(qū)動接收程序會自動讀取報文,同時發(fā)送一個接收事件。作為應用程序的接收線程在等待到該事件后,調(diào)用CAN_GetNextReceivedFrame(…)即可進行CAN數(shù)據(jù)報文的讀取。需要注意的是函數(shù)CAN_GetNextReceivedFrame每執(zhí)行一次,只是讀取了一幀CAN數(shù)據(jù)報文,如果在應用程序中需要將最新的數(shù)據(jù)全部讀出,只需反復調(diào)用該函數(shù),直到該函數(shù)的返回值為FALSE。
接收線程部分代碼:
DWORD CEM9000_CAN::ReadThreadFunc( LPVOID lparam )
{
CEM9000_CAN *ceCAN = (CEM9000_CAN*)lparam;
BOOL bResult;
while( 1 )
{
if(WaitForSingleObject(ceCAN->m_hReadCloseEvent,0 )==WAIT_OBJECT_0 )
{
break;
}
// 等待接收事件觸發(fā),使用以下代碼
WaitForSingleObject( ceCAN->m_hRxEvent, INFINITE );
// 若采用定時查詢,則調(diào)用Sleep(..)即可,Sleep的時間由應用程序確定
// Sleep( 50 );
ceCAN->m_nRxCounter = 0;
for( ; ; )
{
// 讀取已接收的所有數(shù)據(jù)幀
bResult=CAN_GetNextReceivedFrame(ceCAN->m_hCAN,
&ceCAN->RxMFrame[ceCAN->m_nRxCounter] );
if( !bResult )
{
break;
}
ceCAN->m_nRxCounter++;
}
if(ceCAN->m_nRxCounter>0 )
{
// 調(diào)用回調(diào)函數(shù),進行必要的數(shù)據(jù)處理
ceCAN->OnRead( ceCAN->m_pCANOwner );
}
}
return 0;
}
CAN數(shù)據(jù)報文的發(fā)送比較簡單,應用程序直接調(diào)用函數(shù)CAN_SendFrame(…)即可。
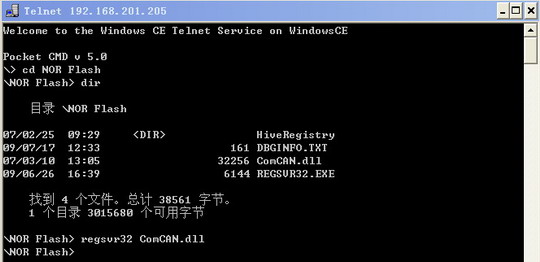
英創(chuàng)公司針對CAN總線的應用提供圖形化的測試程序,用戶可以直接利用該程序進行CAN接口通訊基本收發(fā)測試。EM9000下的測試界面如下圖所示:
-
arm9
+關注
關注
2文章
290瀏覽量
55021 -
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35295 -
CAN接口
+關注
關注
3文章
77瀏覽量
25648
發(fā)布評論請先 登錄
相關推薦
英創(chuàng)嵌入式主板的無線通訊解決方案

英創(chuàng)信息技術VS2005調(diào)試ARM9核心板簡介

英創(chuàng)信息技術9260系列嵌入式主板調(diào)試淺談
英創(chuàng)信息技術ARM9工控主板WinCE應用程序遠程控制應用
英創(chuàng)信息技術ARM9工控主板內(nèi)嵌AD概述
英創(chuàng)信息技術ARM9主板上運行案例解析
英創(chuàng)信息技術CAN接口COM組件在C#語言領域應用
英創(chuàng)信息技術ARM9工控板遠程抓拍圖像應用介紹
英創(chuàng)信息技術ARM9主板進行連接調(diào)試的兩種方法
英創(chuàng)信息技術基于英創(chuàng)主板快速構建整機應用方案簡介
ARM9嵌入式系統(tǒng)復習重點






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論