") H-橋式電機驅(qū)動器的工作原理及制作
H-橋式電機驅(qū)動器的工作原理及制作
步驟1:必需的硬件
為了能夠設(shè)計出這樣的電機驅(qū)動器,有很多不同的選擇,因此,我使用了以下方法組件:
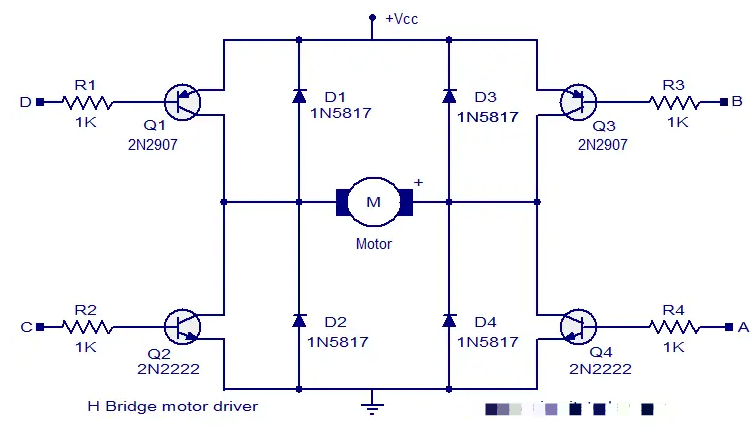
x4 BD135或BD137或BD139 BJT npn晶體管(大多數(shù)時間都可以使用任何npn晶體管)
x1 7805穩(wěn)壓器
x4二極管(
x1 74HC08 Quad NAND GATE邏輯芯片(您不必完全使用它,也可以使用晶體管來制造我們自己的NAND門)
》
x1 74LS14P非門(任何2個非門(逆變器)都可以)
x1 100nF電容器
x1 0.33uF電容器
x1 0.1設(shè)計完成后,還需要使用uF電容器
x1直流電動機(12v)
焊接線等。


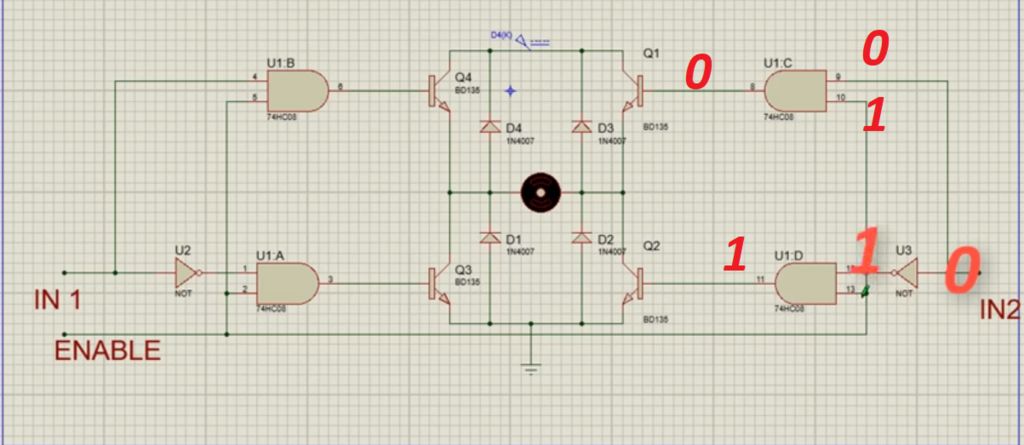
嗯,我們實際上有一個簡單的原理圖她即借助3個輸入引腳(IN1,IN2,ENABLE),我們將能夠雙向驅(qū)動電動機。在此原理圖中,無論其他輸入如何,都使用ENABLE引腳來使能我們的驅(qū)動器,如果ENABLE =邏輯LOW(0v),則由于AND門,電路將不會驅(qū)動電動機。這就是“與”門的任何低輸入都會給我們低輸出的原因。
注意:通過將PWM設(shè)為“啟用”,我們將能夠控制電動機的速度。
并且在照片中顯示了門真相表!
讓我們看看先說ENABLE = 0且IN1 = 1(5V),然后柵極輸出為= 1,第二個lbe = 0且Q4(在示意圖中)晶體管將處于ON狀態(tài),Q3將處于ON狀態(tài)。同樣,IN = 0,即U1:C并且gate的輸出為Logic 0。 U1:D相應(yīng)地為1,因此Q1晶體管將處于截止?fàn)顟B(tài),而Q2晶體管將處于導(dǎo)通狀態(tài)。根據(jù)這些邏輯,電動機將由處于一個導(dǎo)通狀態(tài)的兩個晶體管驅(qū)動。要沿其他方向行駛,可以將相反的邏輯應(yīng)用于輸入。
注意:如果有任何輸入(IN1和IN2)在同一時間應(yīng)用了相同的邏輯,例如(IN1 = 0,IN2 = 0或IN1 = 1,IN2 = 1不會驅(qū)動電動機,因此,這是Brakins情況)。
步驟3:測試PWM的代碼(使用Arduino)
這里我們有很短的代碼,以便以速度控制方式測試電路。為此,我們必須生成PWM。我已經(jīng)使用arduino生成了PWM。
代碼和Arduino測試原理圖如下所示。
請注意:您必須將Arduino的GND連接到PCB的GND。
第4步:PCB訂購
在模擬中進行測試之后,我們可以使用您想要的任何程序繪制PCB原理圖。在這里,我有自己的設(shè)計和Gerber文件。獲得Gerber文件后,您可以將其上傳到PCBWay并進行訂購。
PCB公司鏈接(PCBWAY):單擊此處!
注意:此PCB設(shè)計不是唯一的。它是L298N的一半。但是,由于我們使用的組件,它無法提供與L298N相同的電流量。
第5步:焊接組件
在獲得PCB之后,我們可以焊接相關(guān)的提示:一對一地將元件放在PCB上,翻轉(zhuǎn)并一一焊接。
焊接部分在視頻中顯示為好。您只需看一下即可。
責(zé)任編輯:wv
-
電機驅(qū)動器
+關(guān)注
關(guān)注
16文章
646瀏覽量
64711
發(fā)布評論請先 登錄
相關(guān)推薦
驅(qū)動器的工作原理 驅(qū)動器與電機的區(qū)別
額定電源電壓為42V+兩個H橋驅(qū)動器的雙橋電機驅(qū)動芯片-SS6810R

步進電機驅(qū)動器的主要工作原理是什么?
使用MSPM0 MCU為步進電機和有刷直流(BDC)電機實現(xiàn)優(yōu)化的H橋驅(qū)動器控制

半橋驅(qū)動器和全橋驅(qū)動器的差異
半橋驅(qū)動器的工作原理和應(yīng)用
H橋電機驅(qū)動電路電路圖 H橋電機驅(qū)動電路的工作原理和控制方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論