

上海潤欣科技股份有限公司創研社
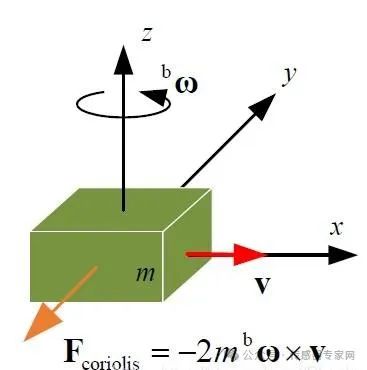
接上一篇“九軸傳感器之加速度計”,本篇主要講述九軸姿態傳感器中的陀螺儀部分。陀螺儀傳感器可以讓物體在運動過程中感知其水平、垂直、俯仰、航向和角速度等信息。關于三軸陀螺儀的工作原理見圖1,旋轉軸和轉子在不受外力影響的情況下并不受物體的外部變化而變化,利用這個特性,我們可以在物體三維運動中提煉出相關的角度和角速度。

圖1
角速度,即單位時間內所轉過的弧度,其單位是弧度每秒(簡稱 度/秒);如圖2所示,物體從X0/Y0/ZO轉到X1/Y1/Z1可以分解為三個方向軸上的角度變化,而每一個軸的角度變化又可以通過旋轉另外兩個軸得到。以Z軸為例,Z0到Z1的轉角Az01分別在XZ平面和YZ平面上投影了Ay和Ax,也就是說Z軸在Z0的方向上繞著Y軸旋轉Ay度,再繞著X軸旋轉Ax度,就得到了Z1的方向;到此就完成了X/Y二軸的旋轉檢測,最后加上繞著Z軸的旋轉角度Az即可完成三軸陀螺儀的環繞角度變化的檢測。

圖2
陀螺儀最終輸出的是角度的變化率,也就是說,陀螺儀輸出不是Ax/Ay/Az的角度值,而是單位時間內角度的變化,假設物體t0秒測出的三軸的旋轉弧度分別為Ax0/Ay0/Az0,t1秒測出的三軸旋轉弧度為Ax1/Ay1/Az1,則三軸角速度ωX/ωY/ωZ的值為
ωX = (Ax1-Ax0) / (t1 – t0)
ωY = (Ay1-Ay0) / (t1 – t0)
ωZ = (Az1-Az0) / (t1 – t0)
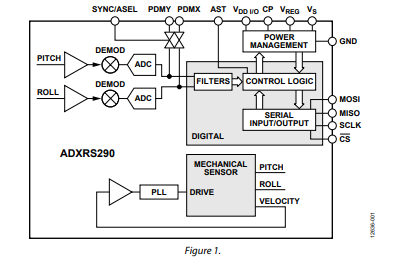
如圖3所示,跟加速度計一樣,陀螺儀的輸出有通過I2C/SPI等接口直接輸出數字的,也有需要經過ADC轉換的模擬信號輸出,類似的我們以12bit ADC為例,其輸出值最大為2^12-1=4095,我們定義Acx/Acy/Acz為X/Y/Z三軸角速度的ADC輸入值,則可以用以下公式得出三軸角速度ωX/ωY/ωZ的值
ωX = ((Acx/4095) * Vref – V0ω) / Sens
ωY = ((Acy/4095) * Vref – V0ω) / Sens
ωZ = ((Acz/4095) * Vref – V0ω) / Sens
等式中Vref為參考電壓,V0ω為零角速度電壓值,也就是說物體在沒有任何轉動影響時候的輸出電壓(可以測量得到),Sens為陀螺儀的靈敏度(即單位角速度變化引起的電壓變化值)。

圖3
-
陀螺儀
+關注
關注
44文章
829瀏覽量
99677 -
九軸傳感器
+關注
關注
0文章
9瀏覽量
8849
發布評論請先 登錄
深度解析:IMU陀螺儀芯片從6軸到9軸陀螺儀傳感器融合的技術革新

ADXRS290用于穩定應用的超低噪聲、雙軸MEMS陀螺儀技術手冊
愛普生XV7021BB陀螺儀傳感器在人機交互中的應用

九軸傳感器為什么是“九軸”?有什么應用呢?
三軸MEMS陀螺儀:創新科技,精準感知
十軸姿態傳感器模塊 | 集成加速度計、陀螺儀、磁力計,自帶BLE5.0藍牙

嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器icm20607介紹
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器icm20607介紹
愛普生XV-9300LP汽車陀螺儀傳感器的特征和用途
愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設備行業

國產士蘭微MEMS六軸陀螺儀介紹
愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

拿下多個“世界第一”,TDK InvenSense 陀螺儀大有來頭

愛普生(EPSON)陀螺儀傳感器的特點和應用領域介紹
6軸傳感器的工作原理及應用領域






 工商網監
工商網監

評論