 如何使用555定時器IC指導直流電機的速度控制
如何使用555定時器IC指導直流電機的速度控制
第1步:快速了解直流電動機和速度控制
DC電動機是將電能轉換為旋轉機械能的設備。它是一種雙引線設備,其旋轉軸通過電磁感應旋轉,旋轉速度取決于所提供的電流或電壓。通常,當您測量電動機兩根導線之間的電阻時,它們是低電阻設備(大約5至20歐姆)。這是由于這樣的事實,即電動機的內部結構由電磁線線圈組成,該電磁線線圈具有多達數千個繞組,就像復雜的電磁網一樣。因此,您可能會認為,為其提供9V電源會導致流經電動機的電流非常大。但事實并非如此,因為它們不是電阻器之類的無源設備,并且不適用簡單的歐姆。如果您想了解電動機中電壓,電流和速度之間的確切關系,則可能需要查看以下參考資料以進一步閱讀,尤其是當您也要了解特定部件并對其操作進行簡單演示時。
實際意義上的電機
您可以這樣看:您有一個兩端子設備,可根據施加的DC電壓或DC旋轉當前。現在,旋轉運動如何精確地取決于電壓和電流?實際上,所提供的電壓或電流的增加將導致每分鐘轉數的轉速增加。可以說,在0伏或0安培時,電動機將停止旋轉,并且逐點增加電壓或電流量將逐漸增加電動機的旋轉速度。但請始終記住,實際設備有局限性,您不能明顯地將施加的電壓/電流增加到無窮大,以使其具有非常大的超乎想象的旋轉速度(還記得光速嗎?)
如果選擇購買直流電動機,可能會要求您提供額定電壓。在某些情況下,您可以從標簽上讀取一些參數,例如額定電壓和額定速度。從我的一門電子學課程中學到的是,如果給定了電壓和速度額定值,那僅意味著如果向電動機提供的電壓等于其額定電壓,電動機將以該額定速度旋轉。知道其額定電壓也會告訴您一些允許的電壓范圍,以免損壞電機。如Paul Scherz在他的書[1]中所述,額定電壓還告訴您電動機在什么電壓下最有效地運行。您可以為電動機提供低于其額定電壓的電壓,電動機旋轉只會更慢。如果直流電動機的額定電壓為9V,則可以為其提供1V直流電源或電池,并且在某些情況下,電動機的旋轉速度非常慢,而在某些情況下,電動機將停止旋轉。如果手邊有直流電動機,則可以檢查引起旋轉所需的最小電源電壓是多少。必須提供高于額定電壓的電壓。此時,隨著您進一步增加供應,電動機可能開始變熱,并且繼續向前繼續將導致世界末日。
空載和空載情況
基本上,當我們談論帶負載的直流電動機時,這就是我們實際使用它的時候。但是這些簡單的詞就足夠了。這意味著電動機現在是使加載的機械裝置起作用的電動機。您可以將其用于遙控車,發電機,電風扇(安裝風扇葉片時)等。將負載連接到電動機的主要含義是,它會阻礙電動機軸的旋轉,主要是因為它是增加的重量,并且需要額外的扭矩才能旋轉它。從某種意義上說,它會產生摩擦,從而減慢旋轉速度。電動機然后趨于在空載條件下保持其最初的轉速。為此,在給定的恒定電源電壓下,它消耗的電流約為初始空載電流的一百倍甚至一千倍。在此項目中,電動機處于空載狀態,因為我們僅根據PWM信號查看速度參數。另外,我們希望在以后測試電路時將功耗降至最低。
速度控制方法
要控制電動機的速度,我們必須控制某些直接影響其速度的電氣參數。顯然,我們必須調節提供給它的電壓和電流。
一種方法是,在恒定電源電壓下,您可能希望將可變電阻器(電位計)與電動機串聯以調節/限制它在操作期間消耗的電流。這種方法的壞處在于,通過限制電流會改變串聯電阻的值,這也會改變電動機兩端的電壓。電動機加載后,會吸收大量電流,從而增加了串聯電阻上的功率。電阻上的功率將被轉換成浪費的熱量。
另一種方法是使用共發射極bjt晶體管配置并以電動機為負載,通過改變電源電壓來調節通過電動機的電流轉接器的基極-發射極結。但是,由于晶體管的Vbe與Ic之間的關系呈指數關系,因此很難預測。除了必須牢記的其他晶體管概念外,晶體管本身還會以熱量的形式散發額外的功率。
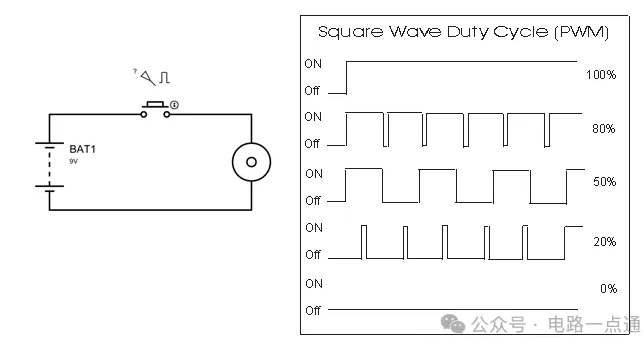
另一種可能也是速度控制方法中最受歡迎的方法是脈沖寬度調制。此方法會在每個狀態上以確定的時間間隔和從整體上定義的恒定頻率生成從開(高)和關(低)切換的電壓或電流脈沖信號。請注意,從電動機看,這種電壓信號仍看起來像恒定的直流電壓。如果為DC電動機提供9V電源和一個開關,但在開和關之間不斷按下開關,則會降低電動機看到的平均電壓,從而降低其速度。
有關詳細討論關于PWM,我們現在繼續下一步。
參考文獻:
[1] Paul Scherz(2000),第13章,實用的發明家電子學。
[2]第22章,查爾斯·普拉特(Charles Platt)撰寫的《電子元件百科全書》第1卷(2013)
[3] https://www.youtube.com/watch?v= LAtPHANEfQo
[4] http://www.electrical4u.com/working-or-operating -。..
步驟2:有關脈沖寬度調制的更多信息
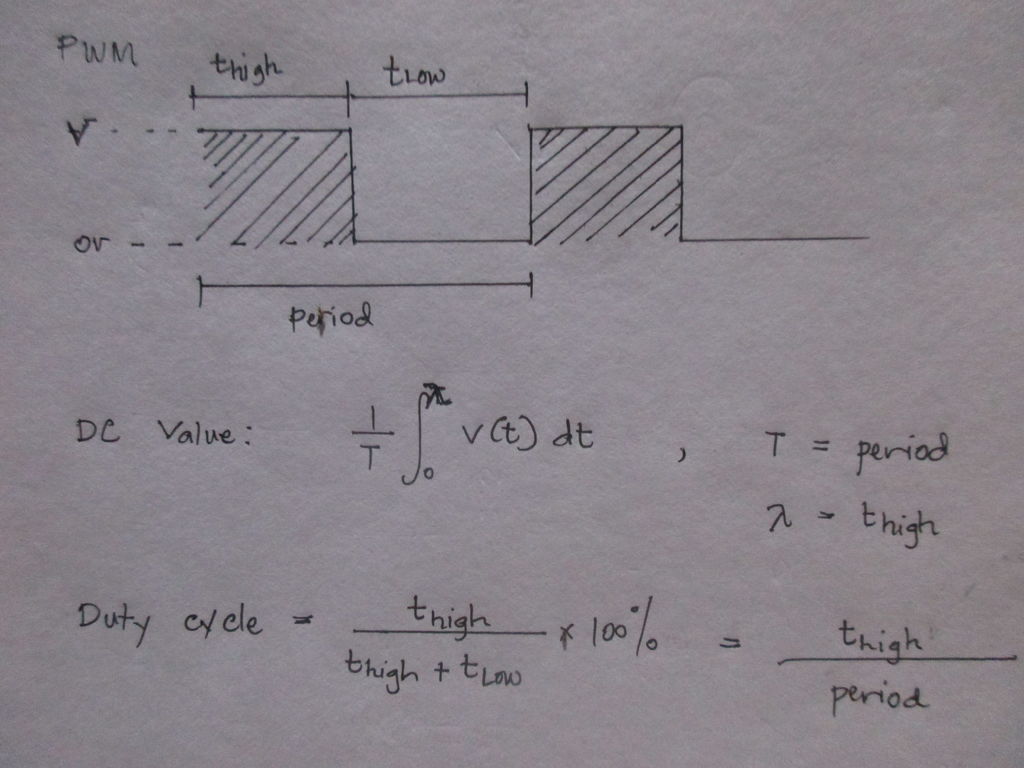
PWM或脈沖寬度調制適用于電壓和電流的方波信號。在方波電壓信號中,電壓電平只有兩個值:HIGH(Vcc)和LOW(接地-0)。方波信號是周期性的,并且具有恒定的工作頻率。
占空比和脈沖寬度
與純直流信號不同,方波信號具有電壓/電流狀態為高的確定間隔和電壓/電流狀態為低的另一個確定間隔。這兩個間隔之和構成了方波的周期。然后,將占空比定義為信號處于高電平狀態的持續時間除以達到一個周期所需的總時間之比。術語“脈沖寬度”是信號狀態為“高”的時間量。只要定義了方波信號的頻率或周期,大多數時間,占空比或脈沖寬度就可以完整地描述方波。
示例: 50 %占空比表示1 Hz信號的一個周期由等于0.5秒的脈沖寬度(信號高電平狀態)和等于0.5秒的信號低電平狀態組成。相同信號頻率的90%占空比由等于0.9秒的脈沖寬度(信號高電平狀態)和等于0.1秒的信號低電平狀態組成。
由于方波是周期性的,因此具有給定期間的等效DC值或平均值,然后通過積分求解該值(請參見上圖)。方波信號的DC值始終小于或等于信號為HIGH時的峰值。占空比也可以使用信號HIGH狀態的平均值和峰值來求解。
占空比= [直流值/峰值] x 100%
示例:基于此基本概念,1 Hz方波信號(高= 5V,低= 0V)的50%占空比等于2.5V直流電壓信號
現在,如果我們在保持頻率不變的情況下改變方波信號的脈沖寬度會發生什么情況?
場景:假設我們有一個1 Hz的方波信號(HIGH = 5V,LOW = 0V),我們想比較10%,50%和90%占空比的等效dc值。對于10%的占空比,我們的等效dc值為0.5V。對于50%的占空比,直流值等于2.5V,對于90%的占空比,直流值等于4.5V。
結論
占空比與方波信號的等效DC值線性成比例。將此信號施加到電動機上,然后改變占空比/脈沖寬度,也會改變電動機看到的等效直流值,從而改變其轉速。
參考文獻:
[1] https://learn.sparkfun.com/tutorials/pulse-width -。..
[2] http://www.allaboutcircuits.com/textbook/semicond 。..
[3] http://www.embedded.com/electronics-blogs/beginne 。..
第3步:555定時器IC及其操作模式
555定時器IC是一種單片時序電路,它以方波信號的形式產生準確的時序延遲和振蕩。這款小型IC具有很多應用,例如在振蕩器,轉速表,波形發生器,控制系統等中。
555定時器IC的某些功能包括:
-它可使用多種電源供電供電電壓范圍為+5 V至+18 V。
-吸收或吸收200 mA的負載電流。
-應適當選擇外部組件,以便可以定時間隔
-555計時器的輸出由于其高電流輸出而可以驅動晶體管晶體管邏輯(TTL)。
-它的溫度穩定性為每攝氏度溫度變化百萬分之50(ppm),或等效于0.005%/°C。
-定時器的占空比是可調的。/p》
在這一步中,我將不討論內部結構的真正工作原理(只需參考下面的鏈接,尤其是數據表)。您可以將其視為一個黑匣子,具有8個引腳,并借助電阻器和電容器之類的外部組件,可以根據外部連接的組件的值產生振蕩或定時延遲。
現在讓我們根據數據表來談談555定時器的兩種工作模式及其基本電路配置。
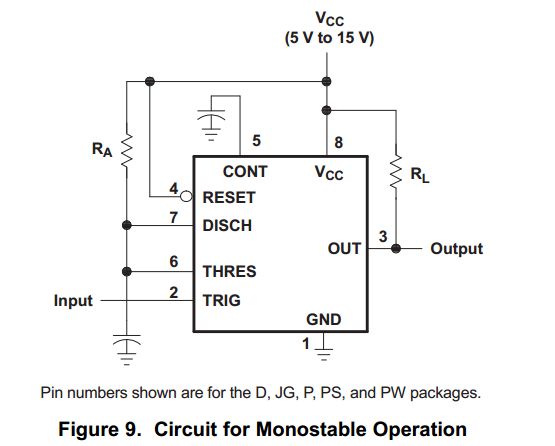
Monostable模式:
用于單穩態模式,則計時器會通過在整個延遲時間內將其輸出切換為HIGH來創建定時延遲。該延遲由IC引腳2的外部輸入觸發。當輸入引腳變為低電平時,定時延遲開始。延遲的持續時間取決于外部電阻器和電容器的值,并使用以下公式計算:
tdelay = 1.1RC
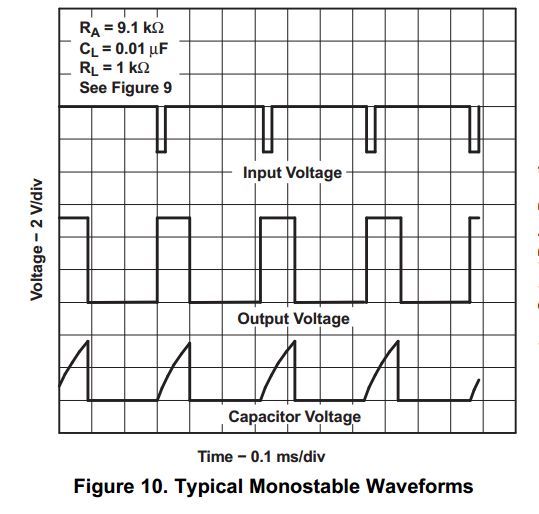
如果輸入信號是周期性的,則輸出也具有相同頻率的周期性。如果輸入信號每1秒鐘變為LOW,則輸出定時延遲每1秒鐘重新觸發一次。
假設輸入LOW持續1秒鐘,但您的定時延遲僅持續0.5秒鐘。在時間t = 0時,假設輸入開始切換為低電平,輸出開始切換為高電平,并且在0.5秒的時序延遲后,輸出應切換為低電平以表示延遲結束。但是,此時(t = 0.5),輸入仍處于低電平狀態。這可能會導致輸出立即再次切換到高電平,從而重新觸發延遲,應該通過將輸入的低電平持續時間設置為與定時延遲持續時間相比相對較小的值來避免這種情況。換句話說,可以增加輸入的占空比以減少其LOW狀態的持續時間(增加處于HIGH狀態的時間)。
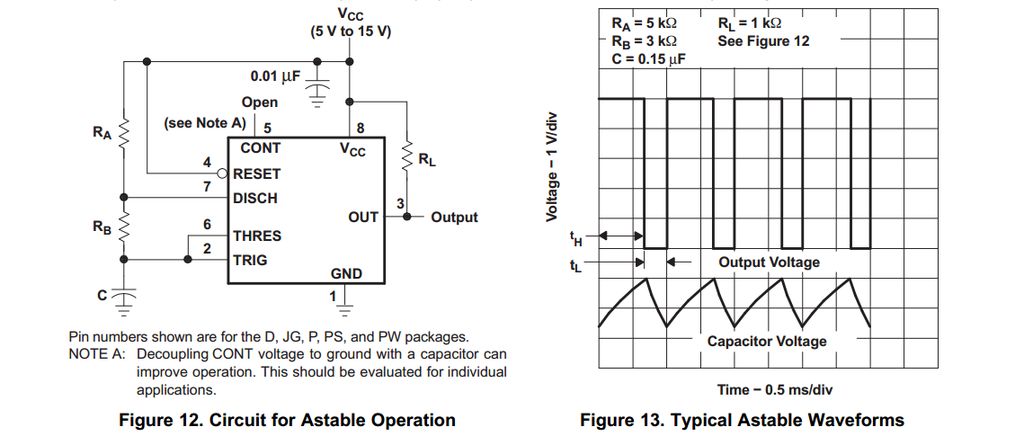
穩定模式:
非穩態模式的功能就像一個振蕩器,其輸出方波的頻率,脈沖寬度和占空比取決于外部電阻器和電容器的值。除非。..如果您切斷電源,這種振蕩將永遠持續下去。脈沖寬度,占空比和頻率的計算公式如下:
脈沖寬度(t high)= 0.693(Ra + Rb)C
t low = 0.693(Rb) C
周期= 0.693(Ra + 2Rb)C
頻率= 1/周期
占空比= [t high/周期] x 100%
根據該公式,我們可以看到,僅更改一個分量的值將導致信號的脈沖寬度,頻率和占空比產生一組不同的值。不僅我們通過改變Rb或Ra的值來改變脈沖寬度,而且還改變頻率。
單穩態和非穩態模式的基本電路配置如上圖所示。 NE555(Texas Instruments)的參考
參考文獻:
[1]第6章,實用電子手冊第六版。由Ian Sinclair和John Dunton提供
[2] LM555數據表:http://www.ti.com/lit/ds/symlink/lm555.pdf
[3] NE555數據表:http://www.ti.com/lit/ds/symlink/ne555.pdf
[4] http://www.555-timer-circuits.com/
[5] http://www.electronics-tutorials.ws/waveforms/555.。.
[6] http://www.electronics.dit.ie/staff/mtully/555%20 。..
步驟4:設計動機
如前所述,其中之一控制電機速度的有效方法是通過脈沖寬度調制。如果我們計劃使用555定時器的非穩定模式的基本配置,則將是不合適的,因為改變脈沖寬度也會改變方波信號的頻率。
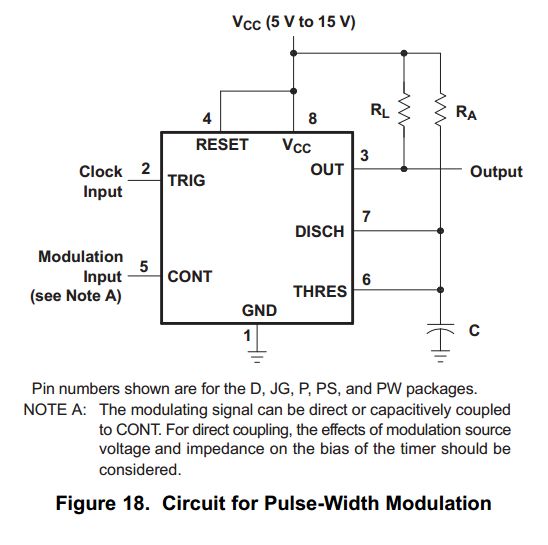
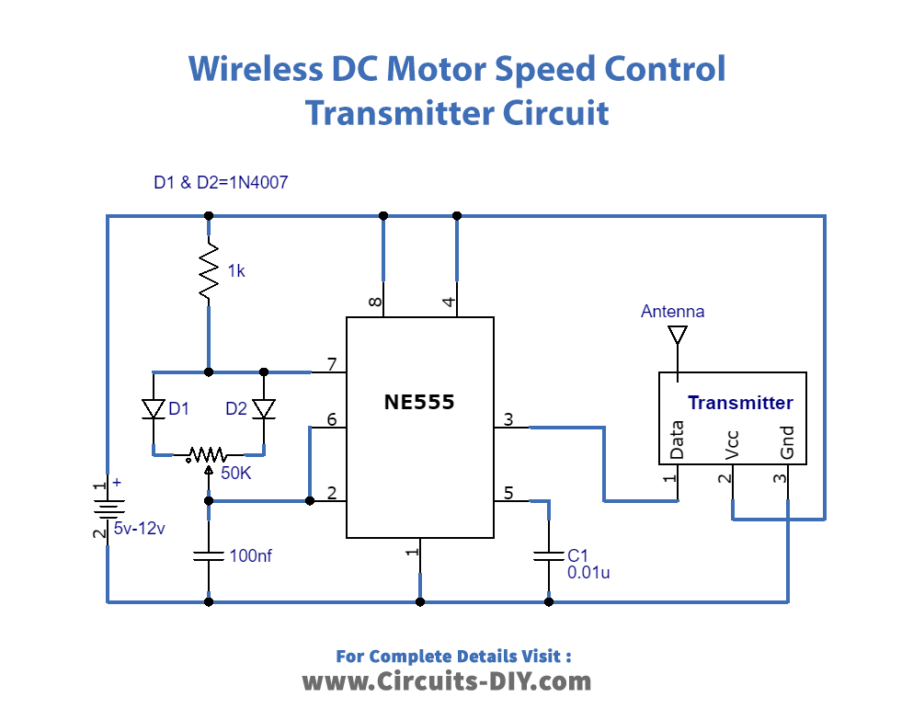
此項目的動機是NE555定時器數據表中提供的動機。在數據表的圖18中,提供了脈寬調制電路的示意圖。它在單穩態模式下使用555定時器,帶有兩個輸入。一個用于時鐘輸入(引腳2),它負責觸發輸出延時信號。另一個是調制輸入(引腳5),它可以改變定時器內的閾值電壓,進而改變輸出時間延遲,而與外部電阻器和電容器的值無關。當我說獨立時,我的意思是時序延遲不遵循第3步中討論的用于單穩態操作的公式。
查看該圖,我立即想到使用另一個555定時器IC作為時鐘輸入,并將其配置為以約90%占空比輸出的穩定模式工作,以最小化狀態LOW的持續時間。對于調制輸入,我只需放置一個源于Vcc的電位器即可將輸入電壓從0V更改為Vcc。
參考文獻:
[1 ] NE555數據表:http://www.ti.com/lit/ds/symlink/ne555.pdf
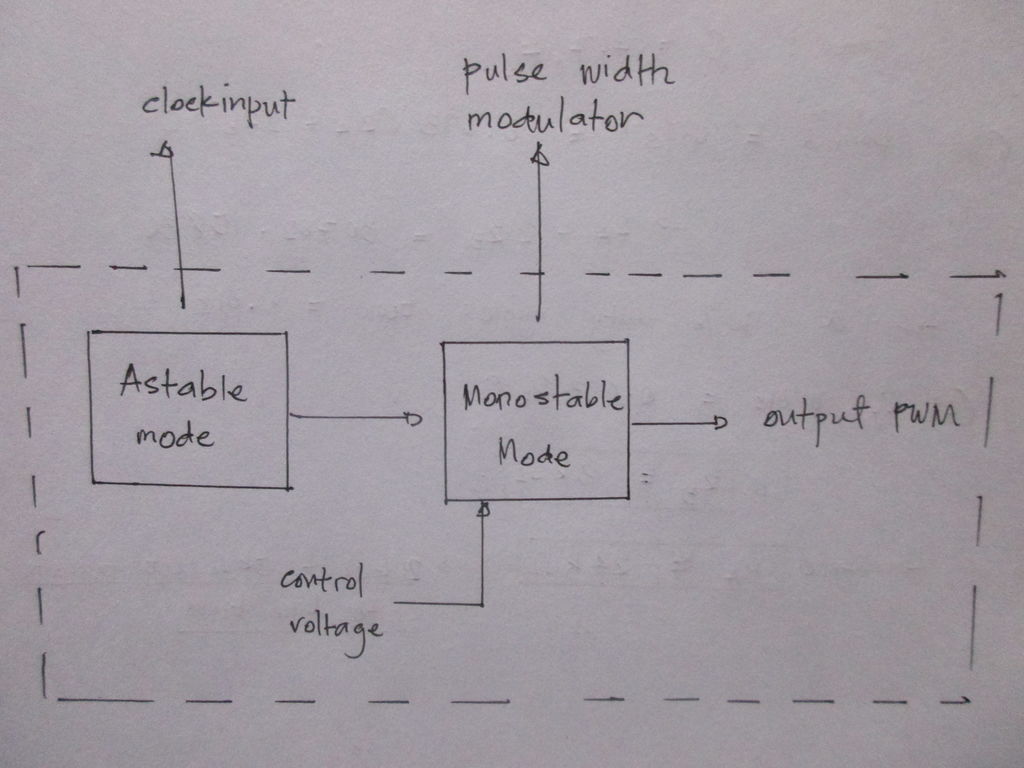
步驟5:設計前的計算和設計實現
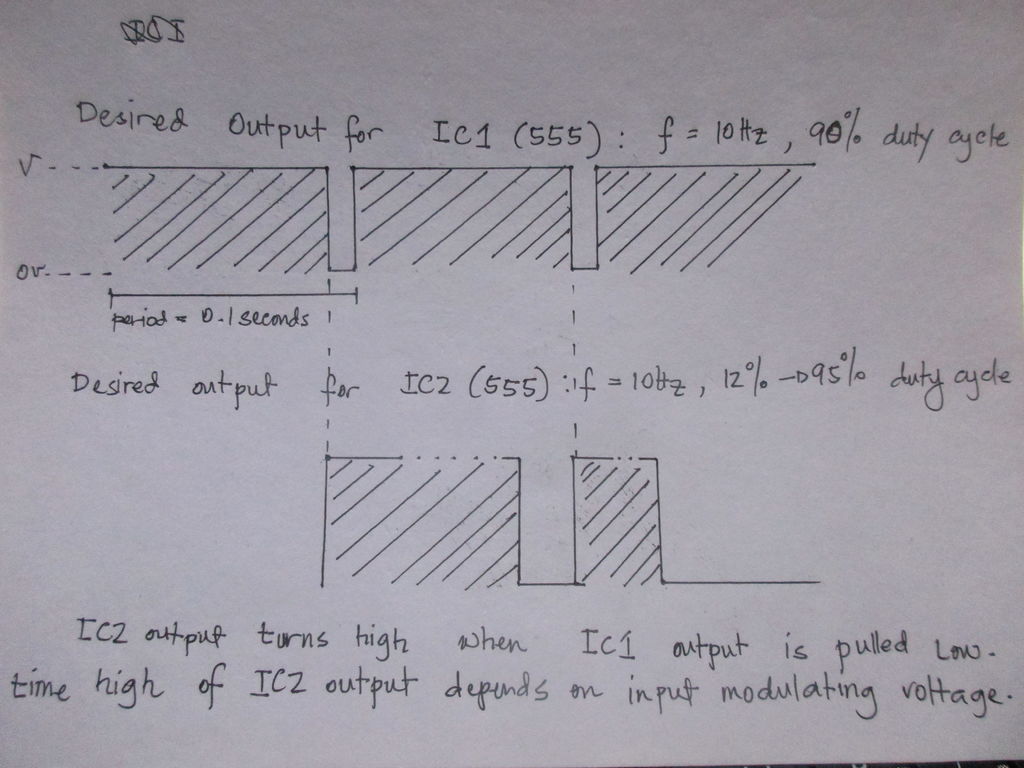
設計非常簡單。我們有兩個階段:第一階段是時鐘階段,它以恒定的頻率和占空比產生振蕩,第二階段是響應觸發輸入和頻率與輸入頻率相同的控制電壓而產生可變的定時延遲。 br》我選擇了一個10Hz的工作頻率,因為我最初想到使用LED來觀察其在連接到輸出端時如何閃爍,隨后將被DC電動機代替。通常,在處理電動機時,這是一個非常低的工作頻率,因為在低占空比下運行時可能會出現抖動。通常,在與電動機打交道時,需要較高的頻率(100Hz或更高)才能使電動機平穩運行,并且幾乎不會注意到開關狀態之間明顯的切換。但是,以我的情況而言,電動機似乎仍可以在10Hz的頻率下平穩運行。
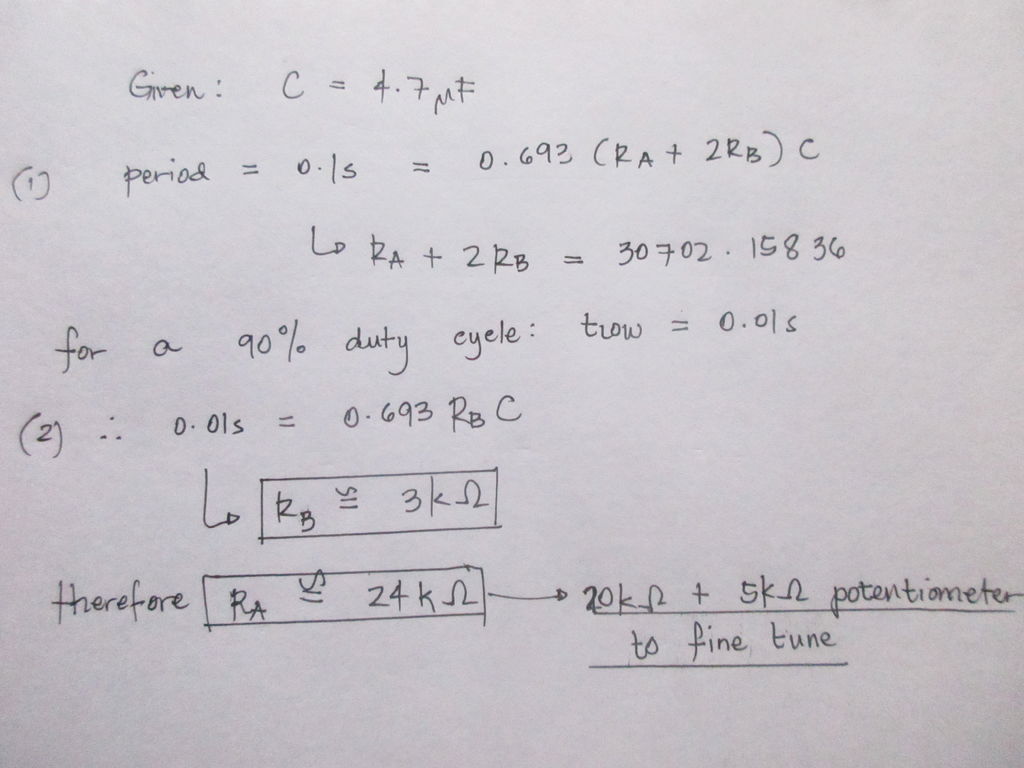
在第一階段,我們使用了處于不穩定模式的555定時器,其工作頻率為10Hz,占空比為90%。為此,我們必須計算電阻器Ra,Rb和電容器C的特定值。在這種情況下,我選擇電容器值為4.7uF,從該值中我們發現Ra = 24Kohm,Rb = 3Kohm (請參閱上面的圖像之一)。對于Ra,最好在實際電路實現期間使用20kohm電阻器和5kohm電位器來微調頻率。
對于第二階段,數據表提供的脈寬調制電路圖表示我們必須為R和C選擇值,使得RC = 0.25 x時鐘輸入周期。給定一個10uF的電容值,R應該等于2.5Kohm,但是我沒有2.5kohm的可用空間,因此我決定用3kohm的電容代替它,因為后來知道定時延遲將取決于控制電壓。
對于控制電壓,我選擇了一個50kohm電位器,其兩個外部端子連接到Vcc并接地,而中間端子連接到第二個555定時器IC的控制電壓引腳(引腳5)。 p》
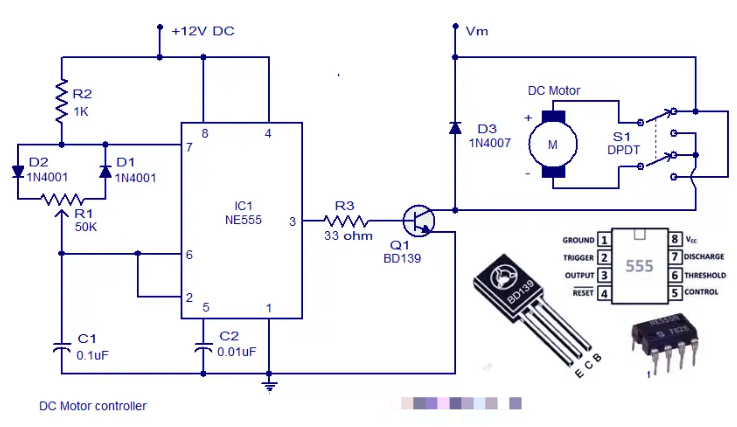
步驟6:電路實現
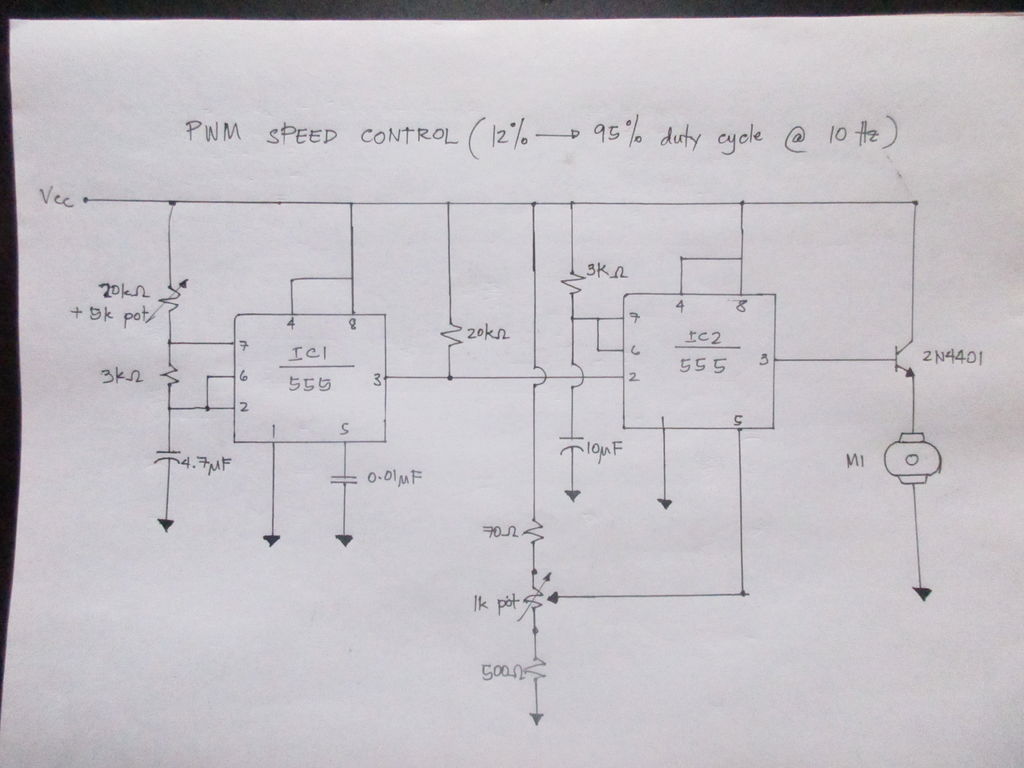
我想出了一個電路圖如上所示。您可以在試驗板上進行配置。您可以在電動機上并聯一個反激二極管,以保護電路免受突然的電壓尖峰影響。您可能還會注意到連接到IC2的控制電壓引腳的一系列電阻(70ohm,500ohm和1kohm電位計)。同樣,您可以用單個50kohm電位器或什至更大值的電位器代替此配置。這對于下一步至關重要,因為上述電路圖已經是最終電路圖。我們需要首先響應輸入控制電壓測試輸出,以查看其是否確實符合我們的初始假設。
材料:
-兩個LM555計時器IC
-兩個20kohm電阻
-5kohm,1kohm和50kohm電位器
-兩個3kohm電阻
-70ohm電阻
-500ohm電阻
-4.7uF 16V電容
-10uF 16V電容
-0.01uF電容
-9V直流電動機
-2N4401 NPN晶體管
恒定的9V電源
-二極管(電動機可選)
第7步:控制電壓
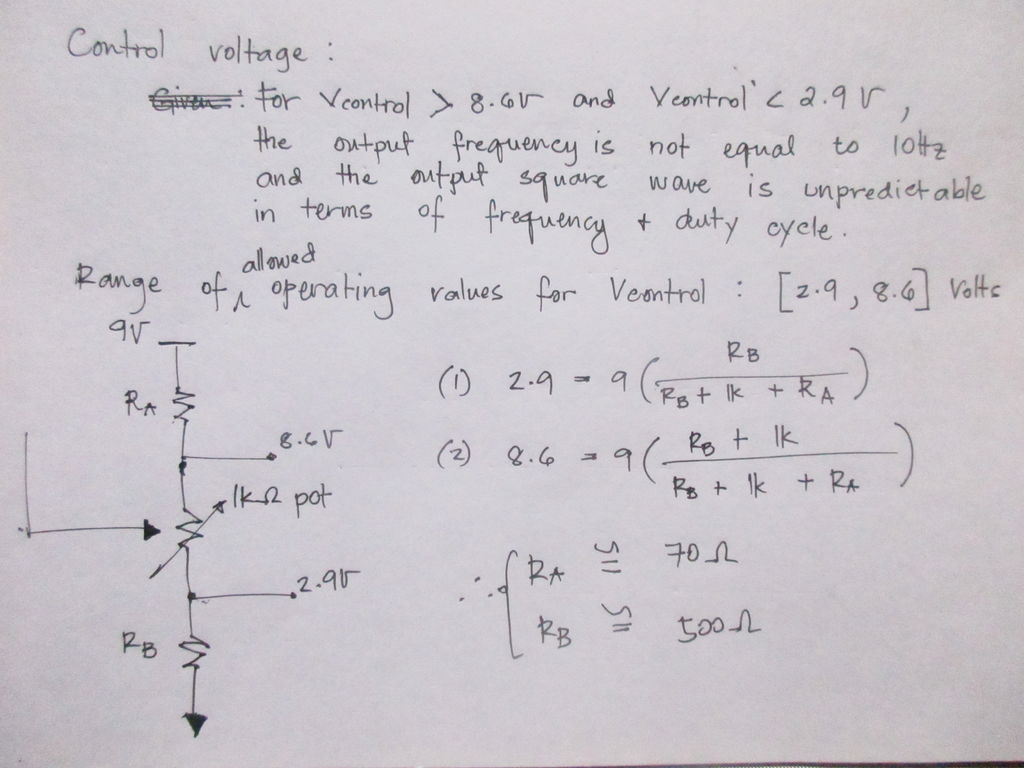
為測試輸出如何響應控制電壓,我決定最初使用50kohm電位計來改變引腳的輸入電壓IC2的5。我發現,當輸入電壓低于2.9V時,輸出頻率變得無法預測,有時我的萬用表讀數為15Hz,20Hz,30Hz等。同樣在2.9V時,萬用表的輸出占空比約為11%。如果您還記得我們在第3步(555 timere IC的可Monostable操作)中曾詳細討論過的情況,那正是輸入控制電壓從2.9 V進一步降低時發生的情況。理想情況下,輸出占空比應該減小,但請記住,時鐘占空比為90%,因此,輸入LOW狀態的持續時間為總周期的十分之一。減小輸出占空比也意味著減小延時時間,并且當其達到輸出延時小于時鐘輸入低電平持續時間的點時,輸出將重新觸發,因為當其切換為高電平時,輸入觸發仍為低電平。重置延遲,就好像萬用表看到的頻率增加一樣。在這些條件下,理想的最小占空比輸出必須為10%,但根據初始測量,發現約為11-12%。另一方面,當輸入控制電壓大于8.6V時在測量占空比為95%的情況下,輸出頻率降低到5Hz,我能想到的唯一解釋是:增加占空比進一步意味著增加與下一個觸發輸入重疊的延時時間。當輸入觸發低電平時,輸出仍為高電平,這意味著時間延遲仍在上升,因此觸發輸入將被忽略。好像IC2一次跳過一個輸入觸發器,從而將輸出頻率降低了一半。
基于此發現,我們需要創建一個電阻器配置,這次使用1kohm電位計,使得最小值輸入到IC2的控制引腳的最大電壓為2.9V,使用9V電源時最大輸入電壓為8.6V。為此,我發現需要兩個與電位器串聯的電阻。 (計算如上圖所示。)
有了此電阻器配置,我們現在可以測試整個電路是否按最初計劃工作。
步驟8 :測試實際電路/結果和討論
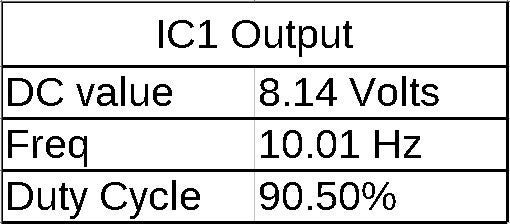
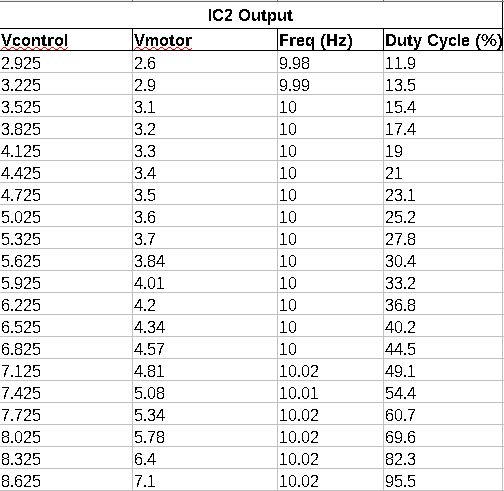
最后一步是測試一些必要的參數以驗證初始假設。我沒有速度測量設備,但幸運的是,我的萬用表還具有用于頻率和占空比測量的附加功能。我別無選擇,只能相信他(萬用表),因為他是我唯一的一個。可以通過聆聽電動機在旋轉時產生的聲音來觀察電動機的速度,并可以通過測量占空比和跨電動機的等效直流電壓來驗證電動機的速度。結果如表所示。
責任編輯:wv
-
直流電機
+關注
關注
36文章
1710瀏覽量
70216 -
555定時器
+關注
關注
37文章
317瀏覽量
67994
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論