 模塊化便攜式傳送帶的制作
模塊化便攜式傳送帶的制作
步驟1:準備
步驟2 :使用工業組件的基本框架
使用工業組件的基本框架
建議構建基本結構請遵循先前文章中發布的“小型中試工廠的構建框架”中顯示的步驟。在此項目中,在構建框架之前,必須在插槽內放置額外的16個(軸承12個,電機支架2個,控制箱2個)T型槽螺母。
下面列出了零件清單作為參考,因為您可以決定最終的幾何尺寸(與所選輪廓的長度直接相關),還可以決定沿著傳送帶的車軸數量。
2020擠壓鋁制T型槽型材“長”
2020擠壓鋁制T型槽型材“短”
內部T型槽連接器90度角
8mm帶軸承座球軸承
M5x8六角內六角螺釘
T型槽螺母
8mm線性軸
GT2同步帶
NEMA 17步進電機
NEMA 17步進電機支架
M3x6六角內六角螺釘
GT2 5毫米16齒滑輪
GT2 8毫米20齒滑輪
1.5、2和4mm六角內六角扳手
第3步:運動傳輸
運動傳輸
該設計被認為具有盡可能少的復雜
機械元件,但是,需要兩個特殊的非瑣碎步驟:切割并連接正時皮帶,該正時皮帶將旋轉從電動機傳遞到車軸,并制造輸送帶
自定義長度的時間帶
如果看不到所需長度的時間帶,則可以使用更大的時間帶來構建自定義時間帶,切割并重新拼接成所需的長度。在沒有專用產品的情況下,最簡單的方法是打磨或去除帶子一端的一些牙齒,膠水與橡膠膠重疊(不要使用超級膠水,否則接頭會太硬),允許膠水晾干至少1小時,然后用線和針縫制以加固關節。如果可能的話,在粘合之前使用同步皮帶夾將兩端正確對齊
要調整張力,請沿著輪廓移動電機/支架組,然后固定螺釘
定制的輸送帶
為避免使用其他張緊器,輸送帶必須使用高彈性材料,可以使用舊的橡膠輪胎內胎。如果可能的話,從汽車上(越大越好),這將提供比較小的(即從自行車)更規則和平坦的表面。另一個替代方法是“瑜伽”和“健身”中使用的橡膠阻力帶,它更“美觀”,但不那么堅固。
必須估計傳送帶的長度比兩個傳送帶之間的距離短一些。最遠的車軸,所以它會自動張緊。以大約45度的角度切割帶子的端部,這樣當關節接近軸時,帶子的阻力較小,行進更平穩。要連接帶子的兩端,請使用橡皮膠(同樣,不要使用超級膠水,否則接頭會太硬)。
步驟4:使用ARDUINO進行速度控制
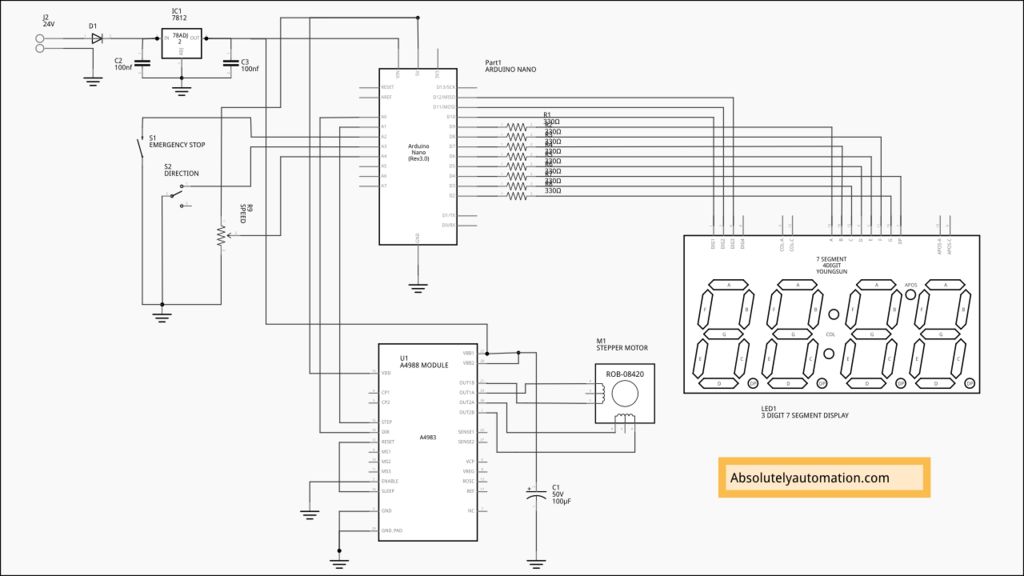
帶有ARDUINO的速度控制
速度控制器能夠為步進電機提供最大功率使用A4988模塊的2安培電流。
3位7段多路復用顯示,用于顯示RMP和其他消息中的樂隊速度。
li》
緊急停止按鈕一旦按下,釋放狀態的唯一方法就是機械解鎖開關并將控制速度設為0。
速度控制范圍從0到300 RPM左右
旋轉選擇器的方向
該電路建立在通用PCB上,
要為系統供電,必須施加14到26 V的電壓,以將其插入輸送機側面的塑料盒中。 ,并再次保護極性反轉。添加了用于RS-485芯片的插座,并將其連接到RX和TX引腳,以用于將來擴展以進行遠程控制。
步驟5:測試和結論
測試和結論
塑料瓶蓋用作樂隊的測試對象。如果
您需要移動較重或較高的物體,則必須添加更多的軸以提高穩定性。
要提高牽引力,請在軸上添加一些“粘性”材料由電動機驅動。熱縮管是一個很好的選擇
在非常低的RPM上,觀察到相當大的振動。當脈沖序列頻率接近其自然共振頻率時,步進電機就會出現這種現象。電動機和支架之間必須使用某種減震材料。
所用電動機的最大電流為1.2安培,因此A4988模塊中的電流限制將其設置為1 A,因為這是在不使用附加冷卻系統的情況下的最大推薦值。
為更有效地緊急停止,常閉(NC)
開關的端子可以與電動機的電源串聯,因此,如果Arduino由于某種原因未能停止電動機,則運動將因缺電而停止。
使用Arduino tone()函數向A4988模塊發送脈沖,因此可能的最低頻率約為30 Hz。
責任編輯:wv
-
Arduino
+關注
關注
188文章
6472瀏覽量
187347 -
傳送帶
+關注
關注
0文章
22瀏覽量
8790
發布評論請先 登錄
相關推薦
便攜式XRF分析儀的優勢與特點
便攜式均衡器的優勢與使用
便攜式儲能已經實現全國產了嗎?
模塊化示波器的技術原理和應用
模塊化儀器的技術原理和應用場景
便攜式穩壓器的優缺點
便攜式示波器的技術原理和應用場景
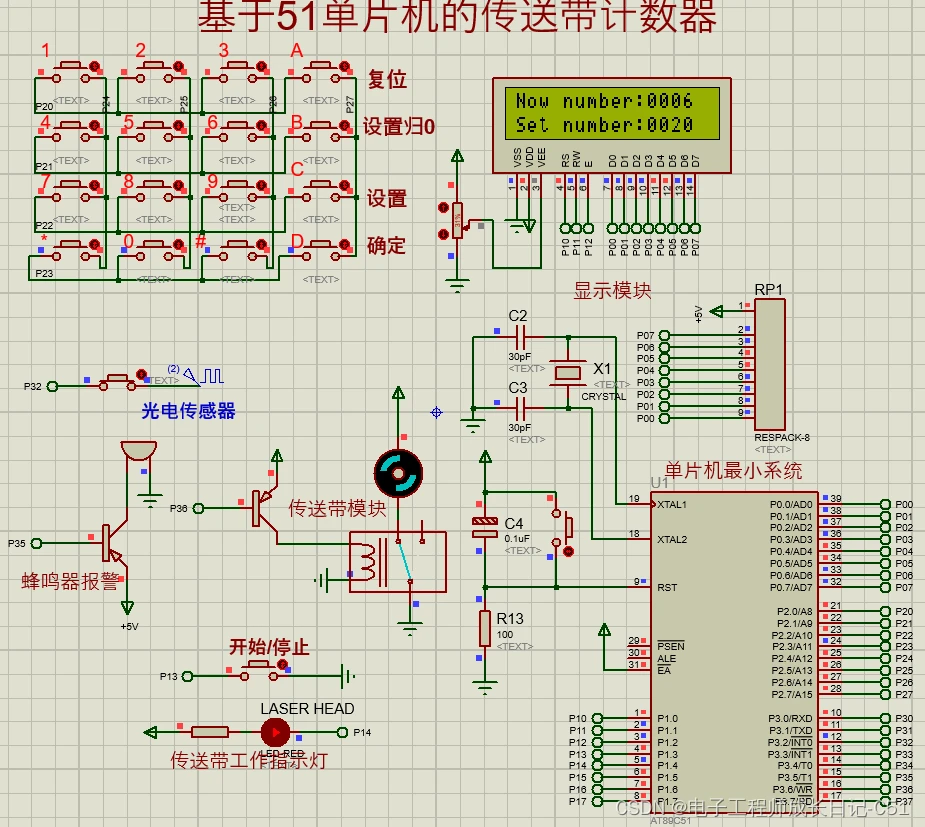
仿真設計|基于51單片機的傳送帶計數器
模塊化插座接線方法有哪些
聚徽觸控-便攜式工控電腦安裝

激光除銹機便攜式價格

低功耗藍牙模塊在便攜式醫療設備上的應用前景

便攜式手提設備設計方案:475-便攜式手提RapidIO協議光纖發包測試儀

便攜式對講機模塊應該具備哪些特點






 工商網監
工商網監
評論