") 自制外骨骼臂DIY圖解
自制外骨骼臂DIY圖解
每當(dāng)我們收縮或放松手臂時(shí),手臂表面都會(huì)產(chǎn)生神經(jīng)電勢(shì)
?運(yùn)動(dòng)單元?jiǎng)幼麟娢唬∕UAP)。 ?幅度約為0-10毫伏
?頻率在0-500Hz之間。
?此MUAP是該項(xiàng)目的核心,也是EMG處理的基礎(chǔ)。/p》
外骨骼臂
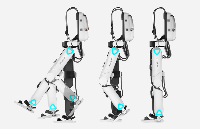
?這是一個(gè)可以戴在生物臂上的外部框架
?它使用無(wú)創(chuàng)方法來(lái)從肌肉獲得MUAP以控制可以戴在生物手臂上的框架。
?由高扭矩伺服電機(jī)提供動(dòng)力。
?可以提供幫助或增強(qiáng)肌肉的力量生物臂,具體取決于伺服電機(jī)的扭矩
。 ?肌電圖(EMG)是借助外骨骼(EXO)進(jìn)行人機(jī)界面(HMI)的合適方法。
步驟2:必需的硬件工具:
單擊鏈接以轉(zhuǎn)到可以購(gòu)買項(xiàng)目
1)1x微控制器板:EVAL-ADuCM360精密模擬微控制器(Analog Devices Inc.)此微控制器板在我們的項(xiàng)目中用作控制外骨骼手臂的大腦。此過(guò)程將用于將我們的EMG傳感器與手臂(伺服電機(jī))連接。
2)1x AD620AN:(Analog Devices Inc.)它從EMG電極接收信號(hào)并提供差分增益作為輸出。
3)2x運(yùn)算放大器:ADTL082/84(Analog Devices Inc.)對(duì)差分放大器的輸出進(jìn)行整流,然后將該輸出饋入低通濾波器,然后饋入增益放大器。 p》
4)1x SERVO MOTORS :180 kg * cm扭矩。
5)3x EMG電纜和電極:用于獲取信號(hào)。
6)2x電池和充電器:兩個(gè)11.2V,5Ah鋰電池,將用于為伺服器供電。兩塊9V電池為EMG電路供電。
7)用于框架設(shè)計(jì)的1x1米鋁板(3毫米厚)。
?5x 100 kOhm 1%
?1x 150 Ohm 1%
?3x 1 kOhm 1%
?1x 10 kOhm微調(diào)
?1x 22.0 nF Tant
?1x 0.01 uF陶瓷盤
其他
?2x 1N4148二極管
?跳線
?1x示波器
?1x萬(wàn)用表
?螺母和螺栓
?魔術(shù)貼帶
?墊填充泡沫
注意:
a)您可以選擇任何首選的微控制器,但它應(yīng)該具有ADC和PWM引腳。
b)可以使用OP-AMP TL084(DIP封裝)代替ADTL082/84(SOIC封裝)。
c)如果您不想構(gòu)建EMG傳感器,請(qǐng)單擊此處EMG傳感器。
第3步:使用的軟件:
1)KEIL uVision用于編譯代碼和監(jiān)視信號(hào)。
2)多isim用于電路設(shè)計(jì)和仿真。
3)Blender用于框架的3D仿真。
4)Arduino和用于實(shí)際傳感器仿真測(cè)試的處理。
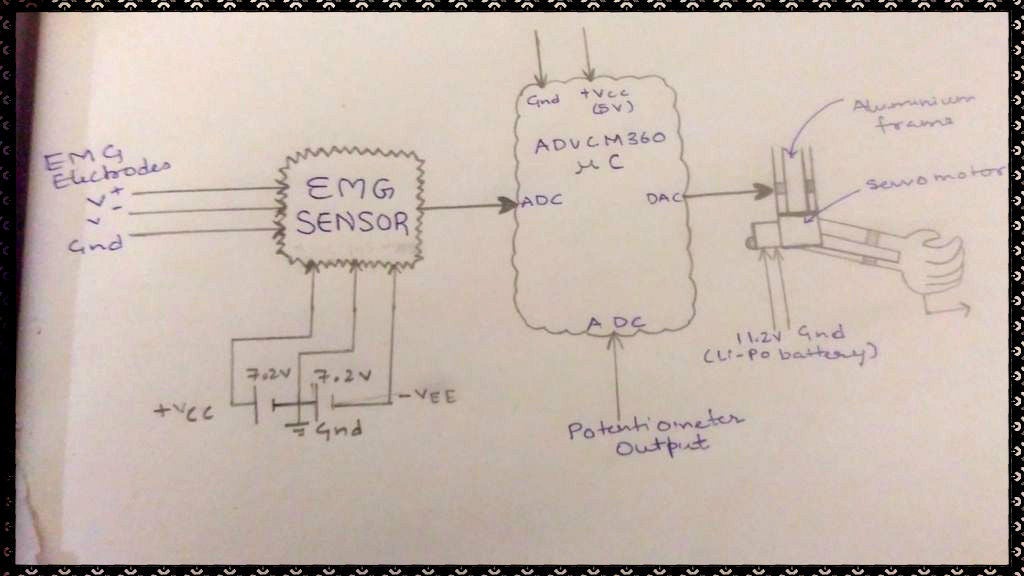
第4步:方法論
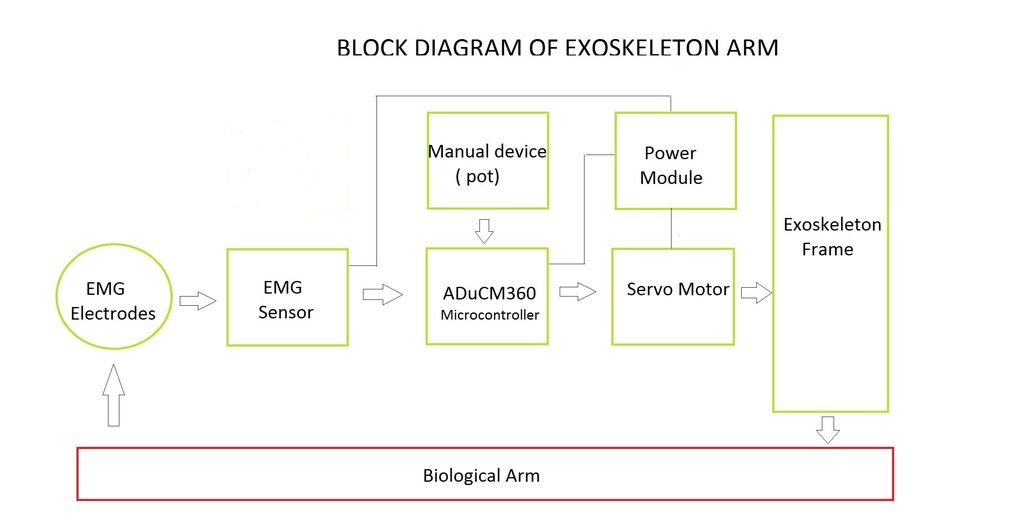
外骨骼臂工作在兩種模式下。第一種模式是自動(dòng)模式,其中信號(hào)處理后的EMG信號(hào)將命令伺服系統(tǒng),第二種是手動(dòng)模式
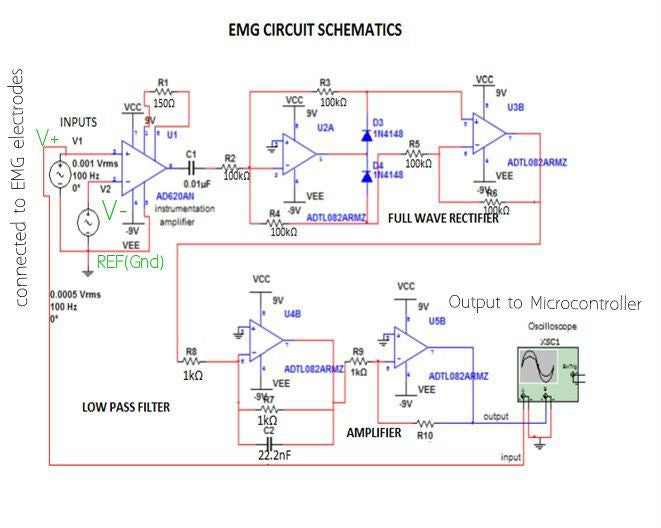
步驟5:EMG電路
步驟6:EMG信號(hào)處理和傳感器測(cè)試的各個(gè)階段:

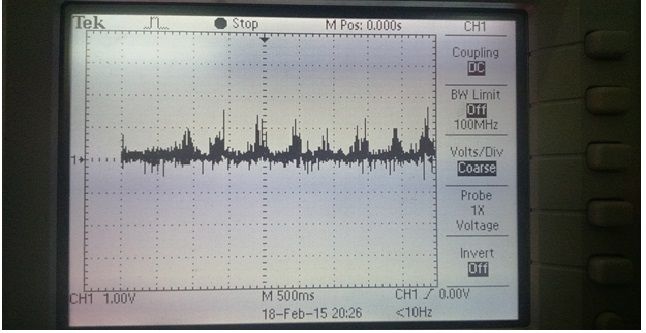
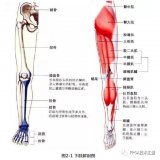
1)信號(hào)采集:電機(jī)單元從患者手臂的二頭肌和三頭肌獲取動(dòng)作電位(MUAP)信號(hào)。在此過(guò)程中使用了三個(gè)EMG電極。將兩個(gè)EMG電極放在二頭肌和三頭肌上,一個(gè)放在肘部上作為接地參考。采集的信號(hào)被饋送到高質(zhì)量儀表放大器AD620。會(huì)放大(增益= 500)有源電極之間的電位差。
儀表放大器的增益G = 1 + 49.9KOhms/R
精度全波整流器將削除不需要的負(fù)半信號(hào)
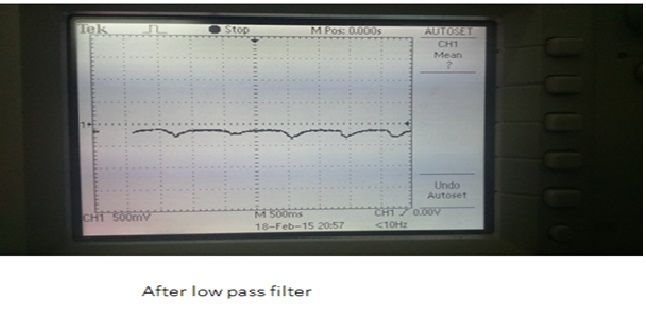
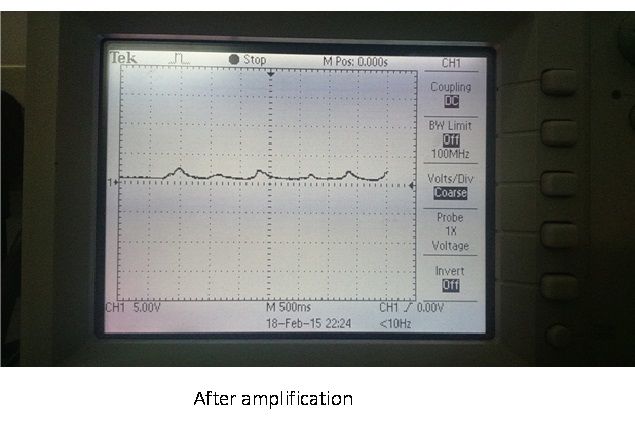
2)濾波和放大:然后將放大后的信號(hào)饋送到直流耦合電容器和全波整流器消除了直流誤差偏移和負(fù)半周期,使信號(hào)與微控制器兼容。然后,該整流信號(hào)通過(guò)低通濾波器以消除高頻并形成信號(hào)的包絡(luò)線。信號(hào)被發(fā)送到具有可變?cè)鲆娴姆糯笃髦幸赃M(jìn)一步放大。所有階段均使用ADTL084運(yùn)放進(jìn)行設(shè)計(jì)
運(yùn)放增益Vout/Vin = -Rf/Rin
我們啟動(dòng)了傳感器
數(shù)據(jù)采集:
放大后的信號(hào)被饋送到微控制器EVAL-ADuCM360 PRECISION ANALOG。模擬電壓由微控制器中存在的超高精度24位ADC讀取。數(shù)據(jù)以2.450 kHz的速率采樣。使用ADC斬波方案。這種斬波方案具有出色的直流失調(diào)和失調(diào)漂移指標(biāo),在需要漂移和噪聲抑制的應(yīng)用中極為有利。從肌肉輸出放松時(shí)獲得的偏移量從ADC輸出中減去
控制邏輯:由于最后階段需要抑制噪聲,因此將ADC輸出線性映射到DAC避免。我們創(chuàng)建了一個(gè)查找表,該表將離散值寫入DAC。無(wú)需為低壓模擬信號(hào)創(chuàng)建條件,以免不必要地激活伺服。在測(cè)試后,最大電壓的閾值是手動(dòng)設(shè)置的,因?yàn)槊總€(gè)測(cè)試對(duì)象都不同。
DAC:微控制器帶有一個(gè)12位DAC。 DAC有兩個(gè)可選范圍:0至1.2 V和0至1.8V。巧合的是,向伺服電機(jī)輸入1.8V電壓可為伺服電機(jī)提供最佳旋轉(zhuǎn)角度。使用此范圍是因?yàn)樗恍枰M(jìn)一步放大。我們使用了DAC插值模式。插值模式使用16位。數(shù)據(jù)寫入使用12位,插值使用4位。
伺服電機(jī):伺服電機(jī)的扭矩為180kgcm。它在脈沖寬度調(diào)制和電位計(jì)模式(模擬信號(hào))兩種模式下運(yùn)行。我們使用模擬模式是因?yàn)榕cPWM相比,它更易于監(jiān)視和分析。輸入5V時(shí),伺服旋轉(zhuǎn)270度。它在14V至30V的電壓下運(yùn)行。30V可獲得最大扭矩。
我們隨附了代碼 和重要的數(shù)據(jù)表
第7步:背包和連接
步驟8:框架設(shè)計(jì)
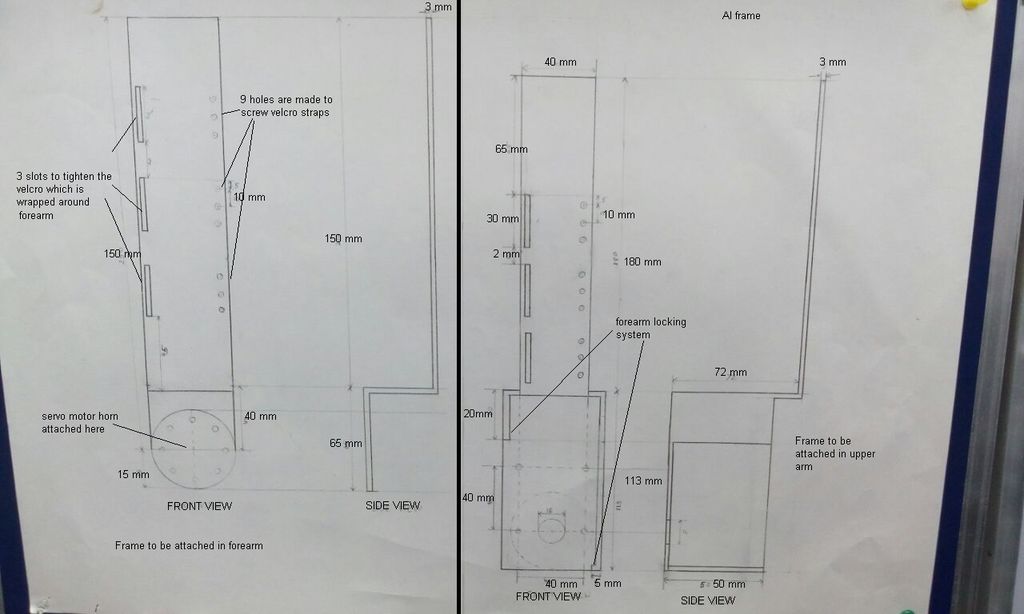
最初,我們?cè)贐lender軟件中設(shè)計(jì)了框架,這里是一些設(shè)計(jì)
最終,我們將伺服電機(jī)直接放在上臂和前臂鋁制框架的樞軸點(diǎn),以減少?gòu)?fù)雜性和時(shí)間消耗,并且一如既往的安全第一!因此,我們還設(shè)計(jì)了一種鎖定系統(tǒng),該系統(tǒng)僅允許前臂移動(dòng)45度至175度。
步驟9:最終測(cè)試!!!
責(zé)任編輯:wv
-
微控制器
+關(guān)注
關(guān)注
48文章
7564瀏覽量
151506 -
人體外骨骼
+關(guān)注
關(guān)注
3文章
13瀏覽量
4577
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
圖像尺寸測(cè)量?jī)x在人造骨骼尺寸測(cè)量中的創(chuàng)新應(yīng)用

朗凱威DIY 磷酸鐵鋰電池組,探索能源新境界

步行助力外骨骼機(jī)器人
【原創(chuàng)】 drawbot 平面機(jī)械臂scara寫字畫畫機(jī)器人DIY教程貼
橋臂電阻對(duì)電橋靈敏度的影響
單臂電橋和雙臂電橋的優(yōu)缺點(diǎn)
「知識(shí)講堂」外骨骼康復(fù)機(jī)器人醫(yī)療器械分類、標(biāo)準(zhǔn)、注冊(cè)指導(dǎo)原則

直流單臂電橋測(cè)電阻的步驟是什么
大象機(jī)器人開源協(xié)作機(jī)械臂機(jī)械臂接入GPT4o大模型!

北卡羅來(lái)納州立大學(xué)突破:模擬框架加速外骨骼機(jī)器人控制系統(tǒng)開發(fā)
北卡羅來(lái)納州立大學(xué):加速外骨骼機(jī)器人控制系統(tǒng)的研發(fā)
佐治亞理工開發(fā)通用機(jī)器人外骨骼控制技術(shù)
如何去提升機(jī)械臂的位置控制性能?

「外骨骼機(jī)器人」顛覆康復(fù)行業(yè)格局,重塑千億康復(fù)市場(chǎng)!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論