 怎樣將ESP8266 WiFi板連接到RoboRema App
怎樣將ESP8266 WiFi板連接到RoboRema App
步驟1 :編碼草圖
查看* ssid =“ RoboRemo”是否適合您的需求或進行更改。 (不要使用您本地網絡中的SSID)
如果要通過* pw
通過工具選擇 =》 放置右面板(Wemos D1 mini)
步驟2:設置COM端口
查看已連接的端口(端口:)。
用microUSB電纜連接ESP8266(Wemos mini)。
選擇最后添加的COM端口。上傳草圖。
步驟3:建立連接
要在ESP8266和RoboRemo之間建立連接,需要執行兩個步驟。
1 設備WiFi
我們是用ESP8266制作的一個Wifi服務器。因此,您必須將設備-WiFi-設置設置為RoboRemo或可能的名稱。因此,請從您的設備轉到WiFi設置。
2 RoboRemo connect
從RoboRemo -app:
菜單 =》 連接 =》 Internet(TCP) =》 其他 =》填寫IP地址。在scetch中給出:192.168.0.1:1234
WiFi IP將被記住,因此下次您可以輕松單擊正確的IP。
如果有問題,必須從串行監視器獲取IP。
Arduino =》 工具 =》 串行監視器。
重置ESP8266或重新連接。
等待直到給出IP。
可以在Arduino草圖中更改IP。例如,在教室里有更多ESP。
步驟4:設置RoboRemo應用界面
現在,正確的程序正在運行ESP8266和連接已建立,我們可以設置用于控制IO引腳的按鈕。
有關更多說明,請下載l RoboRemo手冊
選擇:
菜單 =》 編輯用戶界面 =》點擊屏幕上的任意位置(彈出新菜單)=》選擇按鈕 =》拖動按鈕(在左上角拾起)到您想要的位置=》如果需要,請調整按鈕的大小(在底部右角)。
點擊按鈕,以便顯示菜單=》點擊“ 設置按動” =》輸入 A =》標簽確定。 =》點擊“ 設置釋放操作” =》輸入 1 =》選項卡“ 確定”
通過顏色,文本等自定義按鈕。
保留此按鈕菜單。
選中“ 菜單”按鈕。 =》選擇“ 不要編輯ui ”。
現在必須可以打開和關閉LED_BUILDIN !!!!
第5步:自定義您的應用程序和草圖
如果我提供的基礎運行良好,則可以自定義并擴展您的應用程序和草圖。
此草圖的限制是我使用一個字符的突擊隊。因此,大于9的數字將無法發送。
如果您愿意,可以在RoboRemo網站ESP8266-wifi-car上提取草圖并對其進行調整。
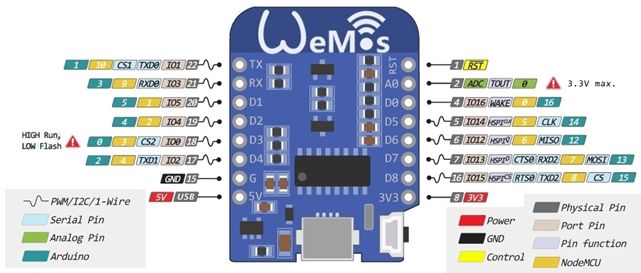
Arduino GPIO編號可以與Wemos或NodeMCU引腳號不匹配。在圖片上查找以進行翻譯或下載PDF
責任編輯:wv
-
Arduino
+關注
關注
188文章
6472瀏覽量
187337 -
ESP8266
+關注
關注
50文章
962瀏覽量
45136
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論