步驟1:您需要的零件!
1:Arduino IDE
2:一個(gè)Arduino Uno(我建議使用Atmega328板)
3:一個(gè)Ublox Neo6MV2 GPS模塊
4:一些跳線
5:一點(diǎn)時(shí)間和耐心
步驟2:連接!
Noka 5110
重置:數(shù)字6
CE:數(shù)字7
DC:數(shù)字5
DIN:數(shù)字9
CLK :數(shù)字8
Vcc:Arduino 3或5伏
接地:接地
背光:Vcc或接地
GPS模塊
Vcc:3或5伏
接地:地面
RX至Arduino TX(數(shù)字1)
TX到Arduino RX(Digital 0)
PPS:未連接
第3步:代碼!
首先下載草圖中包含的正確庫(kù)。
如果庫(kù)發(fā)生錯(cuò)誤,請(qǐng)嘗試下載另一個(gè)版本;否則,請(qǐng)執(zhí)行以下步驟。它對(duì)我有用。
編譯并上傳到您的arduino。
確保RX指示燈在板上閃爍。這樣,開發(fā)板就可以從GPS模塊讀取數(shù)據(jù)。
您完成了!
第4步:顯示了GPS數(shù)據(jù)!
在LCD上顯示緯度,經(jīng)度,日期,高度和當(dāng)前速度。
我仍在努力顯示6位小數(shù)點(diǎn)和日期格式。目前,這種格式還不夠準(zhǔn)確。您必須至少移動(dòng)500米才能更改值。
所以我決定去試乘一下。
當(dāng)前速度的準(zhǔn)確性我想是足夠的。它顯示出比實(shí)際速度低5到6公里/小時(shí)。
對(duì)于一個(gè)便宜的舊式GPS模塊來說還不錯(cuò)。
責(zé)任編輯:wv
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
相關(guān)推薦
測(cè)速雷達(dá)是利用電磁波探測(cè)目標(biāo)的電子設(shè)備,它發(fā)射電磁波對(duì)目標(biāo)進(jìn)行照射并接收其回波,由此獲得目標(biāo)至電磁波發(fā)射點(diǎn)的距離、距離變化率(徑向速度)、方位、高度等信息。測(cè)速雷達(dá)在交通監(jiān)測(cè)中扮演著至關(guān)重要的角色
![的頭像]() 發(fā)表于
發(fā)表于 12-05 17:11
?423次閱讀
理論。其主要內(nèi)容為:物體輻射的波長(zhǎng)因?yàn)椴ㄔ春陀^測(cè)者的相對(duì)運(yùn)動(dòng)而產(chǎn)生變化。 在超聲波測(cè)速的應(yīng)用中,測(cè)速儀向被測(cè)物體(如車輛、網(wǎng)球等)發(fā)射超聲波,超聲波在碰到物體后會(huì)被反射回來。由于被測(cè)物體具有速度,因此反射回來的超聲波的頻率會(huì)發(fā)生變化。這種頻率的變化與
![的頭像]() 發(fā)表于
發(fā)表于 08-16 10:34
?909次閱讀
電磁調(diào)速電機(jī)(Electromagnetic Speed Control Motor,簡(jiǎn)稱ESCM)是一種通過電磁感應(yīng)原理實(shí)現(xiàn)調(diào)速的電機(jī)。在電磁調(diào)速電機(jī)系統(tǒng)中,測(cè)速電機(jī)(Tachometer
![的頭像]() 發(fā)表于
發(fā)表于 06-05 10:56
?1461次閱讀
相對(duì)運(yùn)動(dòng)時(shí),觀察者接收到的波頻率與波源發(fā)出的頻率之間存在差異的現(xiàn)象。在高速公路測(cè)速中,多普勒效應(yīng)被應(yīng)用于雷達(dá)測(cè)速儀。 雷達(dá)測(cè)速儀的工作原理 雷達(dá)測(cè)速儀通過發(fā)射無線電波并接收反射回來的波
![的頭像]() 發(fā)表于
發(fā)表于 05-31 15:55
?2782次閱讀
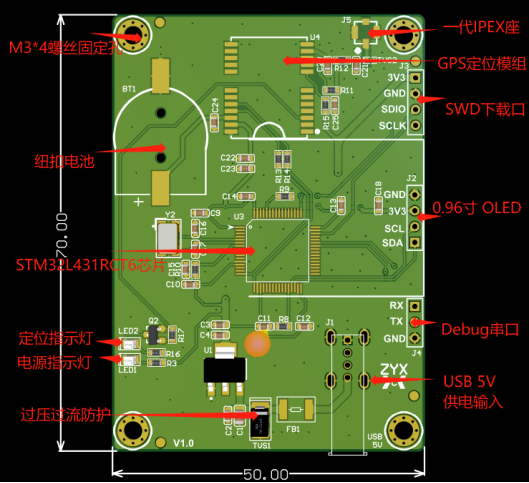
簡(jiǎn)介: 基于STM32的GPS定位儀項(xiàng)目結(jié)合了高性能MCU與GPS技術(shù),實(shí)現(xiàn)了一種功能強(qiáng)大、成本合理的定位方案。MCU解析GPS NEMA協(xié)議并通過0.96寸OLED實(shí)時(shí)顯示經(jīng)緯度 應(yīng)
![的頭像]() 發(fā)表于
發(fā)表于 05-07 09:45
?910次閱讀
一般常見的伺服電機(jī)測(cè)速傳感器分為數(shù)字,模擬兩類。數(shù)字的有光電編碼器,磁編碼器;模擬的有測(cè)速電機(jī);還有一種就是旋轉(zhuǎn)變壓器,它本質(zhì)上是屬于模擬類的,但是通常是將它的信號(hào)處理成為數(shù)字類的,因此也把它歸結(jié)為
![的頭像]() 發(fā)表于
發(fā)表于 04-05 08:44
?1445次閱讀
光耦檢測(cè)儀是一種常見的測(cè)試儀器,用于檢測(cè)光耦件的性能和參數(shù)。光耦件是一種將輸入和輸出電路通過光隔離的組件,常用于電氣隔離和信號(hào)傳輸?shù)葢?yīng)用中。在制作光耦檢測(cè)儀時(shí),主要需要考慮電路設(shè)計(jì)、元器件選型、硬件
![的頭像]() 發(fā)表于
發(fā)表于 04-01 18:10
?2605次閱讀
電子發(fā)燒友網(wǎng)站提供《TFT-LCD面板制作流程.pdf》資料免費(fèi)下載
發(fā)表于 03-24 09:32
?14次下載
電子發(fā)燒友網(wǎng)站提供《用于電視和監(jiān)視器TFT-LCD面板的帶高速放大器的緊湊型LCD偏置IC TPS65165數(shù)據(jù)表.pdf》資料免費(fèi)下載
發(fā)表于 03-06 17:17
?0次下載

電子發(fā)燒友網(wǎng)站提供《用于TV-LCD面板的帶高速放大器的緊湊型LCD偏置IC TPS65162數(shù)據(jù)表.pdf》資料免費(fèi)下載
發(fā)表于 03-06 16:07
?0次下載
測(cè)速電機(jī)選型時(shí)6大注意事項(xiàng):一 確定測(cè)速電機(jī)測(cè)速范圍和精度。不同的應(yīng)用場(chǎng)景對(duì)測(cè)速范圍和精度有不同的要求,因此我們需要依據(jù)實(shí)際需求來選擇合適的測(cè)速
![的頭像]() 發(fā)表于
發(fā)表于 03-06 14:22
?775次閱讀

【電磁兼容技術(shù)文檔分享】頻譜儀應(yīng)用案例&簡(jiǎn)易探頭的制作
![的頭像]() 發(fā)表于
發(fā)表于 02-19 13:20
?1019次閱讀

測(cè)速發(fā)電機(jī)是什么?是一種能夠?qū)⑥D(zhuǎn)速轉(zhuǎn)化為電能的設(shè)備,廣泛應(yīng)用于各行各業(yè)的生產(chǎn)現(xiàn)場(chǎng)。其主要作用是通過測(cè)量轉(zhuǎn)子的轉(zhuǎn)速,將機(jī)械能轉(zhuǎn)化成電能,為工業(yè)生產(chǎn)提供穩(wěn)定的電力支持。測(cè)速發(fā)電機(jī)采用了高精度的測(cè)速系統(tǒng),能夠準(zhǔn)確地檢測(cè)轉(zhuǎn)子的轉(zhuǎn)速,充分
![的頭像]() 發(fā)表于
發(fā)表于 02-18 14:55
?1688次閱讀

雷達(dá)測(cè)速的基本原理: 雷達(dá)測(cè)速是一種常見的交通工具超速監(jiān)控手段,它借助雷達(dá)技術(shù)可以準(zhǔn)確測(cè)量車輛的速度。它的基本原理是利用雷達(dá)波束的多普勒效應(yīng)來測(cè)量目標(biāo)物的速度。 雷達(dá)測(cè)速設(shè)備通常由一個(gè)發(fā)射器和一個(gè)
![的頭像]() 發(fā)表于
發(fā)表于 02-03 14:10
?2088次閱讀
測(cè)速電機(jī): 常見6大注意事項(xiàng)!測(cè)速電機(jī)是一種用于測(cè)量物體運(yùn)動(dòng)速度的設(shè)備,廣泛應(yīng)用于工業(yè)生產(chǎn)和科學(xué)研究中。測(cè)速電機(jī)常見的6大注意事項(xiàng)以確保安全和準(zhǔn)確性。
![的頭像]() 發(fā)表于
發(fā)表于 01-11 10:53
?509次閱讀

") 如何制作帶LCD的GPS測(cè)速儀
如何制作帶LCD的GPS測(cè)速儀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論