 如何使用Arduino UNO和步進電機創建自動倫敦Bascule橋模型
如何使用Arduino UNO和步進電機創建自動倫敦Bascule橋模型
第1步:您需要的零件
對于此項目,您將需要:
1。壓克力板
2。 1個步進電機
4。 1個Arduino UNO
5。 PCB板
6。 1個步進電機驅動器ULN2003A
7。一些吊環螺絲鉤或滑輪
8。 2個門鉸
9。 10個L括號
10。繩索或螺紋
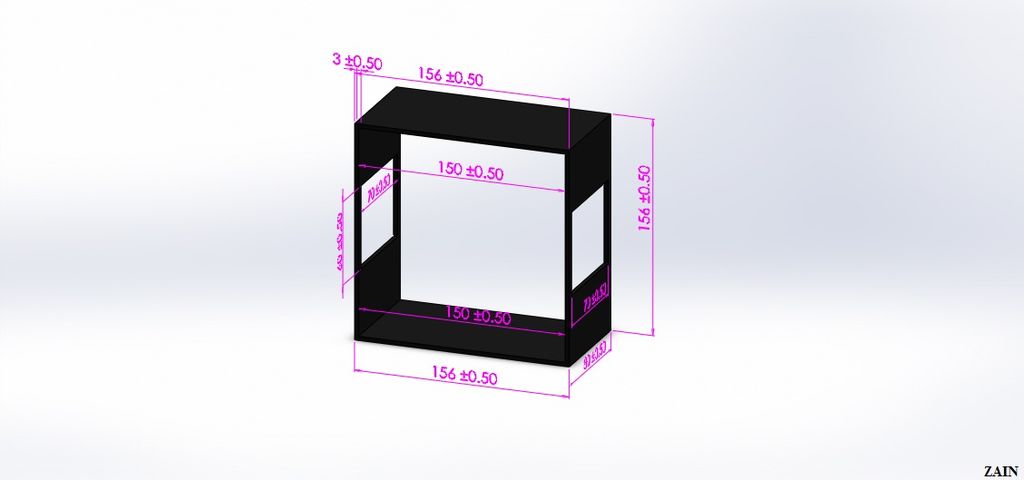
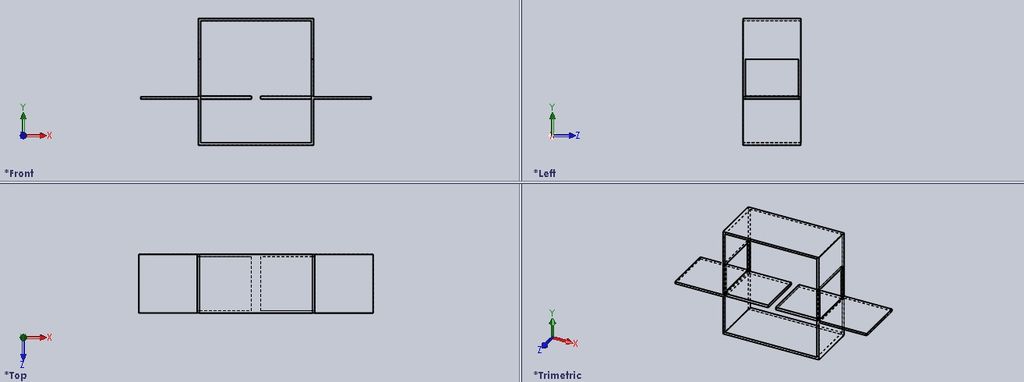
我使用Solidworks設計了整個模型。所有尺寸和圖形均在文件中給出。
只需下載文件并在SolidWorks中打開它們即可。 :)
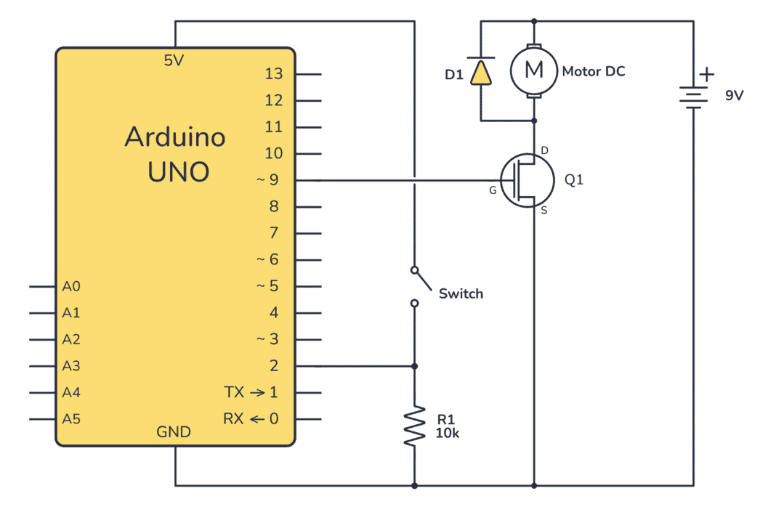
步驟3:準備電路(電子部分)
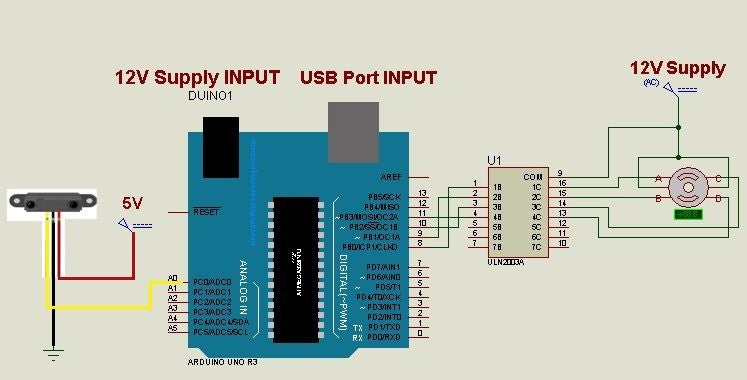
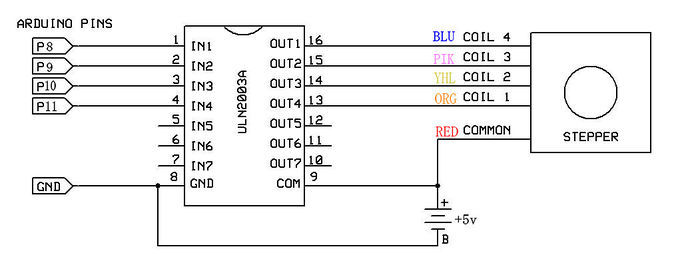
這一步也非常簡單。我用Proteus制作電路。按照圖中給出的示意圖連接每根電線。我還附加了Proteus ISIS文件。
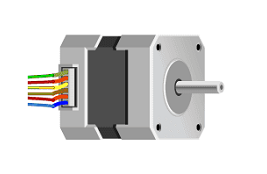
單極和雙極電動機:
不同的步進電動機可以具有不同數量的導線,通常為4、5、6或8根導線。單極電動機通常具有從基座延伸的五,六或八根導線,每相一個線圈。在六線電機中,每個線圈對都有自己的中心抽頭。單極步進電機可以轉換為雙極配置,其優點是與單極步進電機相比,雙極步進電機可以承受更大的負載或扭矩。通常,雙極步進電機有四根電線。有關更多詳細信息和更多信息,請參見這些鏈接。
1。步進電機簡介
2。如何使用步進電機
步驟4:軟件和編碼(Arduino IDE)
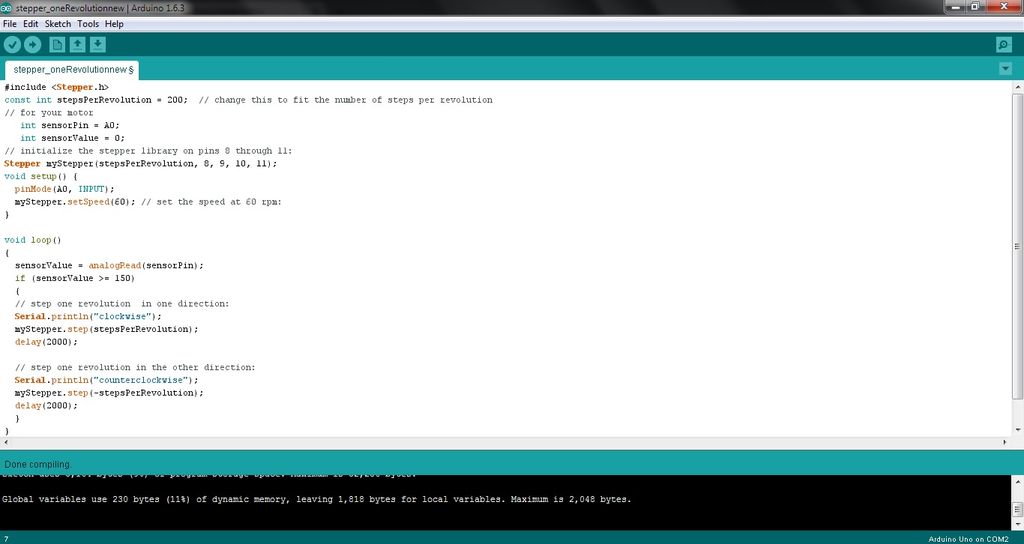
此是最后一步,硬件完成,我們可以開始編程。打開arduino IDE軟件并復制下面的程序或下載Code.txt文件。通過usb電纜將您的arduino開發板連接起來,檢查COM PORT,然后編譯并將代碼上傳到連接到系統的Arduino。
代碼:
#include
const int stepsPerRevolution = 200;//更改此值以適合電機的每轉步數//
int sensorPin = A0;
int sensorValue = 0;
//初始化引腳8到11上的stepper庫:
Stepper myStepper(stepsPerRevolution,8,9,10,11);
void setup()
{
pinMode(A0,INPUT);結果,myStepper.setSpeed(60);//將速度設置為60 rpm
}
void loop()
{
sensorValue = AnalogRead(sensorPin);
if(sensorValue》 = 150)//根據您與傳感器的距離更改您的位置
{
//沿一個方向步進一圈:
Serial.println(“順時針”);
myStepper.step(stepsPerRevolution);
延遲(2000);////您可以根據電動機的轉速
//沿另一方向步進一轉來更改延遲時間值:
Serial.println(“逆時針”);
myStepper.step(-stepsPerRevolution);
延遲(2000);
}
}
第5步:完成:D
責任編輯:wv
-
步進電機
+關注
關注
150文章
3114瀏覽量
147600 -
Arduino
+關注
關注
188文章
6472瀏覽量
187330
發布評論請先 登錄
相關推薦
Made with KiCad(十一):Sangaboard步進電機控制板
步進電機如何自適應控制?步進電機如何細分驅動控制?
使用MSPM0 MCU為步進電機和有刷直流(BDC)電機實現優化的H橋驅動器控制


如何用Arduino制作一個簡易自動喂魚器
如何調整二相步進電機的步進角度,控制步進角度的功能?
步進電機常見問題及維護

什么是步進電機的細分控制?步進電機為什么要細分,如何細分?
arduino控制步進電機代碼
如何使用Arduino UNO板和電位器控制伺服電機

如何使用Arduino UNO和TIP120晶體管驅動和控制直流電機的速度





 工商網監
工商網監
評論