 多功能數碼單反遙控器的制作
多功能數碼單反遙控器的制作
步驟1 :
此多功能遙控器通過復制尼康DSLR響應的IR命令脈沖來工作。有關如何復制此信號的我的帖子可以在這里找到。收到信號后,可以通過對微控制器進行編程以完全相同的方式向IR LED發出脈沖來復制該信號。
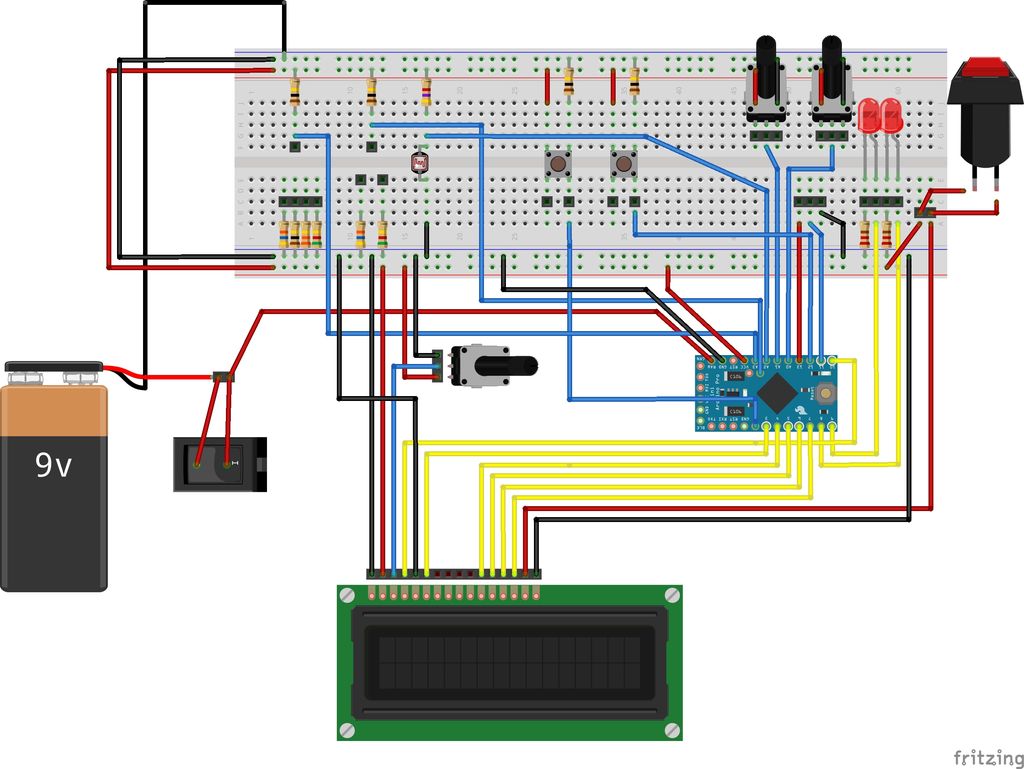
其他功能通過以下方法實現(請參見面包板/PCB圖片) :-
a) 模式選擇 。該電路使用具有四個“下”臂(R3至R6)的分壓器,每個下臂具有不同的電阻。通過在每種模式之間切換并讀取輸出電壓(Arduino模擬引腳A3),設備可以在四種操作模式之間切換。
a) 間隔計 。我們使用一個電位器(R7)設置脈沖之間的間隔,并使用另一個電位器(R8)決定總共需要傳輸多少個脈沖。
b) 光檢測 即可。一個電位器(R7)用于設置閾值水平。如果來自閃電的光線強度超過此閾值,則將發送一個脈沖來激活相機的快門釋放。使用分壓器形式的光敏電阻(R10)和4.7 K歐姆電阻(R9)測量(通過Arduino Analog Pin A2)光強度。有關此分壓器工作原理的詳細信息,請點擊此處。
c) 運動感應 。使用PIR(被動紅外)傳感器可實現運動感應。這些廉價的傳感器可測量環境熱量水平,如果環境溫度水平存在變化,則可在其輸出線上發出HIGH信號。因此,當動物(或任何其他溫暖的身體)走過攝像頭陷阱時,PIR會感應到該運動并在其輸出線上產生HIGH。微控制器(Arduino數字引腳D11)讀取此HIGH信號并觸發一個脈沖。通過Arduino數字引腳D13為PIR供電。
d) 測試模式 :設備可以在“測試”或“脈沖”下運行(通過開關連接到插頭J25,J26,J27)。在“測試”狀態下,微控制器不會向IR LED發出脈沖(激活相機),而是使正常的紅色LED閃爍。因此,通過將遙控器置于“測試”狀態,您可以進行所需的所有設置,并通過觀看紅色的“測試” LED確認觸發器將在正確的時間操作。現在,您可以將設備放回“脈沖”狀態,它現在將通過操作相機的IR LED發送脈沖。
e) 狀態LCD 。在調整各種開關和電位計上的設置時,LCD顯示屏將顯示以下信息。..
a)設備處于哪種模式-間隔計/光檢測/運動檢測/手動。
b)在間隔計模式下-(i)兩次拍攝之間的延遲(ii)沒有曝光
c)光線檢測模式-(i)閾值設置(ii)當前的光線讀數
d)被動紅外模式-LCD通過顯示“ Motion DETECT !!”來指示是否檢測到任何運動。
步驟2:所需的組件

微控制器
Arduino Pro Mini-一個(我使用的是Pro Mini,但是任何與Arduino兼容的板都可以通過對指定為“ RESET”引腳的引腳進行必要的更改來正常工作。它必須是具有中斷功能的引腳。如果您使用Arduino UNO,則無需進行任何更改。 。
電阻
R2至R6-模式選擇分壓器R9-光檢測的“上”臂離子分壓器
R10-用于光檢測分壓器“下”臂的LDR
R15,R16,R 17-“測試”/“傳輸”狀態選擇分壓器
R11-RESET按鈕的下拉電阻(此版本中不需要)
R12-CONFIRM按鈕的下拉電阻
R13,R14-限流與輸出LED串聯的電阻。
有關所需電阻器的確切值,請參見PCB圖片上的注釋。
電位器
R1-LCD亮度電位器0-10K
R7-延遲/閾值設置電位器0-10K
R8-重復設置電位器0-10K
》 開關
模式選擇開關-4位旋轉選擇器開關
“測試/脈沖”狀態選擇開關-2個位置選擇器開關
LCD背光燈開關-按鈕
CONFIRM按鈕開關-按鈕
其他組件
被動紅外(PIR)傳感器-一個
IR LED-一個紅色LED-一個
16x02背光LCD顯示屏-一個
步驟3:組裝
下載電路圖(ML_L3_Remote_With_PCB.pdf)并準備好PCB,然后將所有組件焊接到位。如果您不知道如何蝕刻PCB,那么有很多指導可以告訴您如何進行。否則,您可以在這里閱讀我的方法。
您還可以下載我用來制作此電路的Fritzing草圖。我上傳了兩個版本:-
(a)Breadboard.fzz(顯示面包板上的所有組件)
(b)PCB.fzz(顯示需要可以被蝕刻,但是沒有任何“外部”組件,只是它們的插頭引腳)。
PCB僅在一側被蝕刻。我試圖盡量減少在PCB上進行所有連接所需的跳線數量,并且在需要將跳線焊接到位的地方都使用1/2/3針母接頭。您可以在我上傳的PCB圖片上看到標題的描述。這些列在下面。..
J5,J6-用于四向旋轉開關(模式選擇)
J25,J26,J27-用于兩向選擇開關(區域選擇)
J9,J10-用于RESET按鈕(此版本中不需要)
J7,J8-用于CONFIRM按鈕
J32-用于PIR引腳
J13,J24-用于測試LED引腳
J14,J23-用于IR LED引腳
J3-用于LCD背光按鈕
J11 -用于電位計1
J31-用于電位計2
J4,J22-用于LCD對比度電位計
J2,J21,J30-用于LCD連接
J15-用于主DC 9V電源開關
J16-用于電池端子
J18-用于Arduino I/O引腳
J17-Arduino Pro PC的迷你接口
J19-Arduino輸出到LEDs
J 29-Arduino輸出引腳連接到LCD上的RS引腳
J 28-RESET按鈕輸入到Arduino中斷引腳D2(此版本中不需要)
最后,還上傳了Arduino源代碼(Nikon_IR_Multi_Functional_Remote.ino)。
步驟4:Bo對其進行修改
一旦電路準備就緒并且一切正常,則可以使用任何一種盒子來放置組件。我用了一個帶鉸鏈蓋的塑料盒。它的尺寸有點大,但可以容納所有組件而不會在電線上施加太大的壓力。
在所有按鈕,開關和LCD都可以插入的地方切出孔。將所有物品固定到位。
LDR固定在盒子的一側。盒子的另一側裝有發送紅外信號的PIR和IR LED(參見圖片)。
步驟5:操作
1。開啟設備
2。選擇所需的操作模式。 LCD將顯示選擇的模式(間隔計/光檢測/運動檢測/手動)以及該模式的參數……
a)在間隔計模式下-(i)兩次拍攝之間的延遲(ii)曝光次數
b)在光檢測模式下-(i)閾值設置(ii)當前光讀數
c)被動紅外模式-液晶顯示屏顯示通過顯示“ Motion DETECT !!”來指示是否檢測到任何運動。
3。如有需要,使用電位計R7和R8更改設置
4。將Regime選擇器開關置于“ TEST”
5。按下開始/確認按鈕。如果TEST LED閃爍符合您的要求,則可以將模式選擇器翻轉到“ PULSE”位置,關閉電源,然后再次打開設備,然后再次按START以開始發送相機脈沖。
在手動模式下,每按一次START/Confirm按鈕,將發送一個脈沖
6。要隨時更改模式,請將模式選擇開關旋轉到所需位置。關閉遙控器,然后再次打開,以進入新的操作模式。
-
遙控器
+關注
關注
18文章
839瀏覽量
66276 -
單反
+關注
關注
0文章
50瀏覽量
14842
發布評論請先 登錄
相關推薦
數字遙控器

定制遙控器主要分為哪些步驟?
RF遙控器廠家:射頻遙控器將成為未來的控制主流
如何選購適合的拷貝遙控器——增配遙控器教程來啦
一文講透如何選擇合適的遙控器定制廠家——電商朋友可以了解下
遙控器解碼器怎么使用
藍牙語音遙控器方案

老陸測功耗03 | 遙控器該扔嗎?

基于國民技術N32WB031的藍牙語音遙控器解決方案

應用在機頂盒遙控器中的2.4GHz無線芯片






 工商網監
工商網監
評論