") 路徑跟隨機器人越野車的制作
路徑跟隨機器人越野車的制作
步驟1:組裝材料

圖片中顯示的某些材料用于制作刮的。但是,本教程將不介紹有關(guān)如何為越野車制造底盤或模型或如何將電線焊接至電動機的過程。如果您愿意,這里是您需要的所有材料:
Raspberry Pi 3
電機控制板
面包板
一個T型補鞋匠+
2個12V直流電動機
2個輪子
1個AA電池座(用于4個AA電池)
4節(jié)AA電池
跳線
USB電池組
螺絲起子
焊接鐵和焊料
剝線鉗
小紙板或塑料盒和膠水/膠帶
2條線傳感器
8條母對母跳線
4條公對公跳線
絕緣帶
步驟2:組裝電動機板
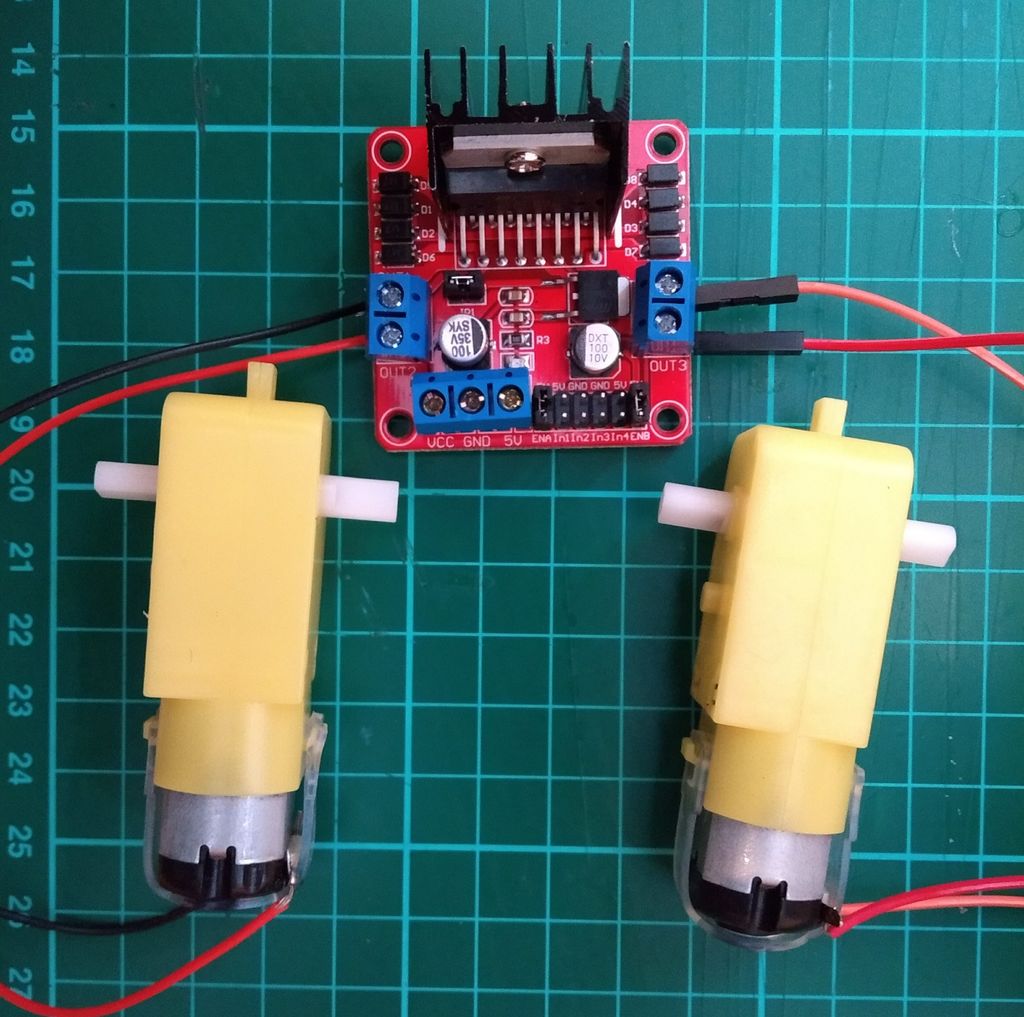
假設(shè)已設(shè)置電動機,則需要將電動機連接到H橋板上。為此,您將需要一把小螺絲刀。現(xiàn)在,您需要將電動機連接到板上。為此,您將需要一個小的螺絲刀
使用螺絲刀,松開端子排中的螺釘。將剝皮的電線末端插入接線盒。
步驟3:為電動機供電
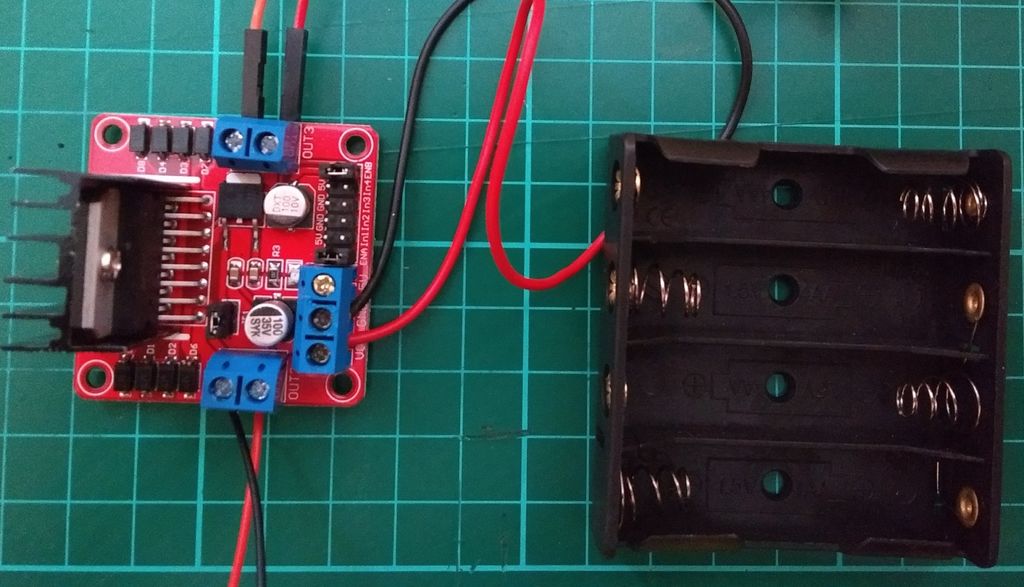
電動機需要的功率超過Rpi可以提供的功率。因此,您必須使用4節(jié)AA電池為它們供電。
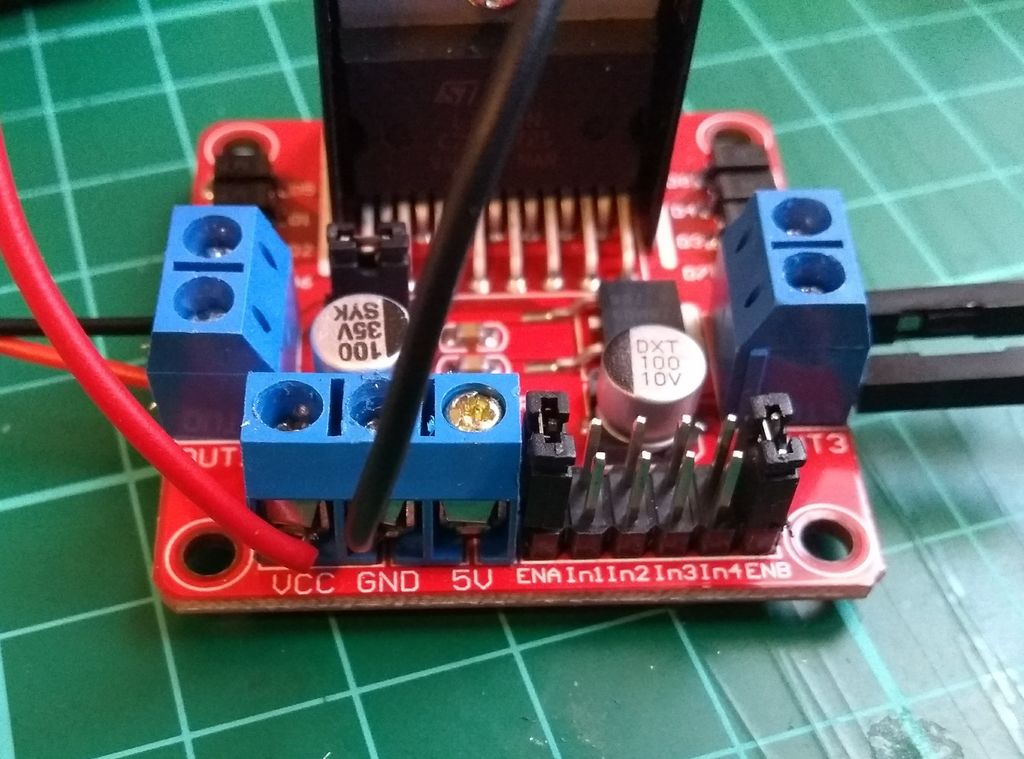
松開標(biāo)有 VCC,GND 和 5V 的接線盒中的螺釘。拿起AA電池座,然后將紅色導(dǎo)線插入 VCC 接線盒中。黑線進入 GND 塊。
擰緊螺釘,使電線牢固地固定到位。
步驟4:將電動機連接至Rpi
該項目中使用的板需要連接到Raspberry Pi。其他板可能會以不同的方式連接,某些板可以簡單地作為HAT放置在Raspberry Pi GPIO引腳上。
此處使用的板上還有標(biāo)記為In1,In2,In3和In4的引腳。作為兩個GND引腳。您可以使用Pi上的哪個GPIO引腳來決定;在該項目中,使用了GPIO 7、8、9和10。如果您的電路板沒有GND引腳,則可以使用Rpi中的GND引腳獲得相同的結(jié)果。如果需要執(zhí)行此操作,請將GND線插入與電池組中黑色線相同的端子排中。
使用T型補鞋匠+連接面包板和Rpi。
使用五根公對公跳線連接到面包板。
In1-》 GPIO 7
In2-》 GPIO 8
In3-》 GPIO 9
In4-》 GPIO 10
步驟5:準(zhǔn)備連接器
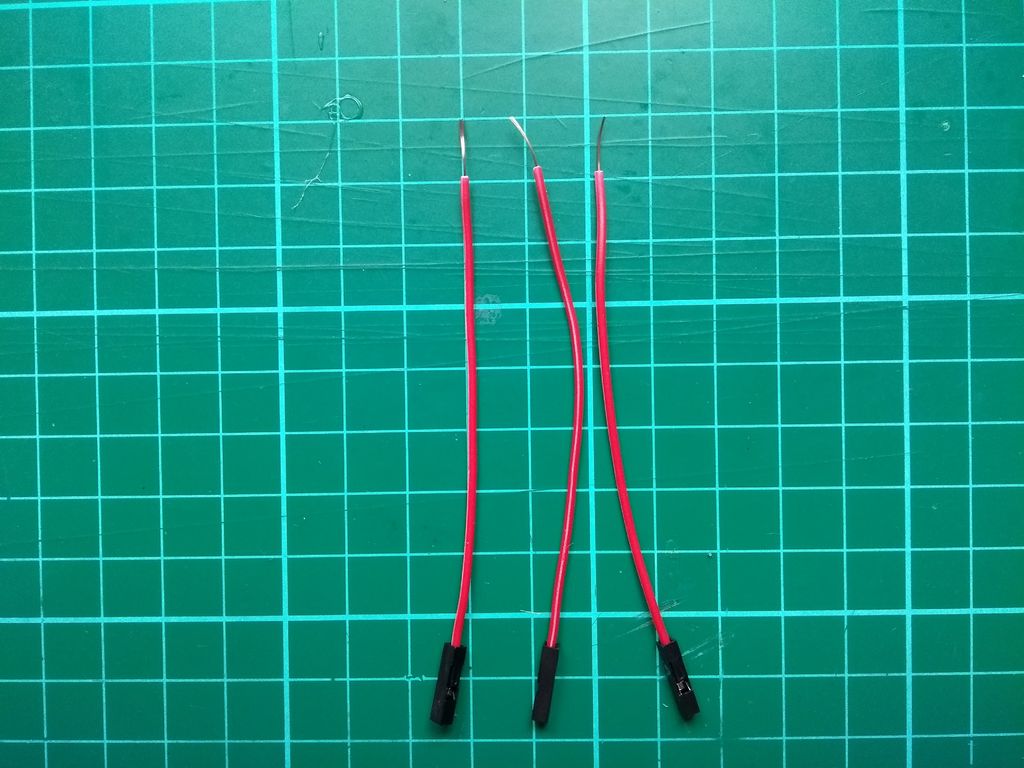
您的第一步將是將線傳感器連接到越野車。通常,本教程中使用的線傳感器類型需要連接到3V3引腳,但是您將通過同一電源引腳運行兩個傳感器,因此將它們都連接到5V引腳。
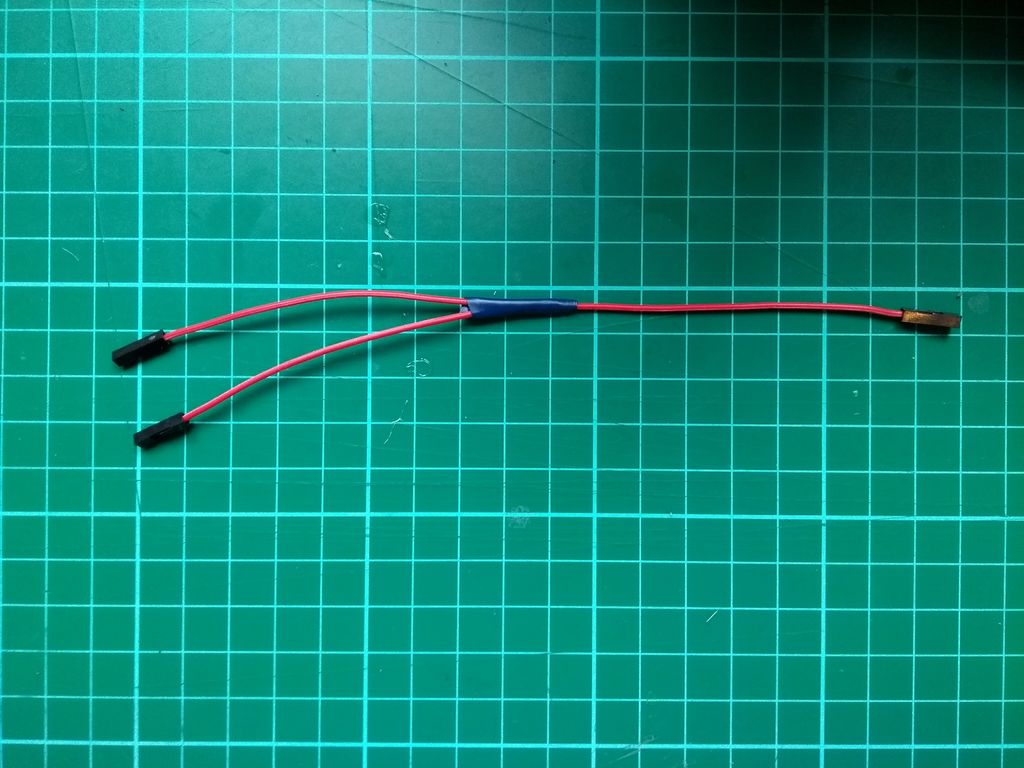
取三根母對母跳線,從兩端拔下連接器,然后剝?nèi)ニ芰献o套,露出下面一厘米左右的多芯電線。抓住三根跳線,將其多芯線絞在一起。然后使用烙鐵將引線鍵合。用少量絕緣膠帶覆蓋引線的連接。
用另外三根母對母跳線重復(fù)整個過程。
步驟6:連接線路傳感器
每個線路傳感器都有三個引腳: VCC 用于供電, GND 接地,DO進行數(shù)字輸出。
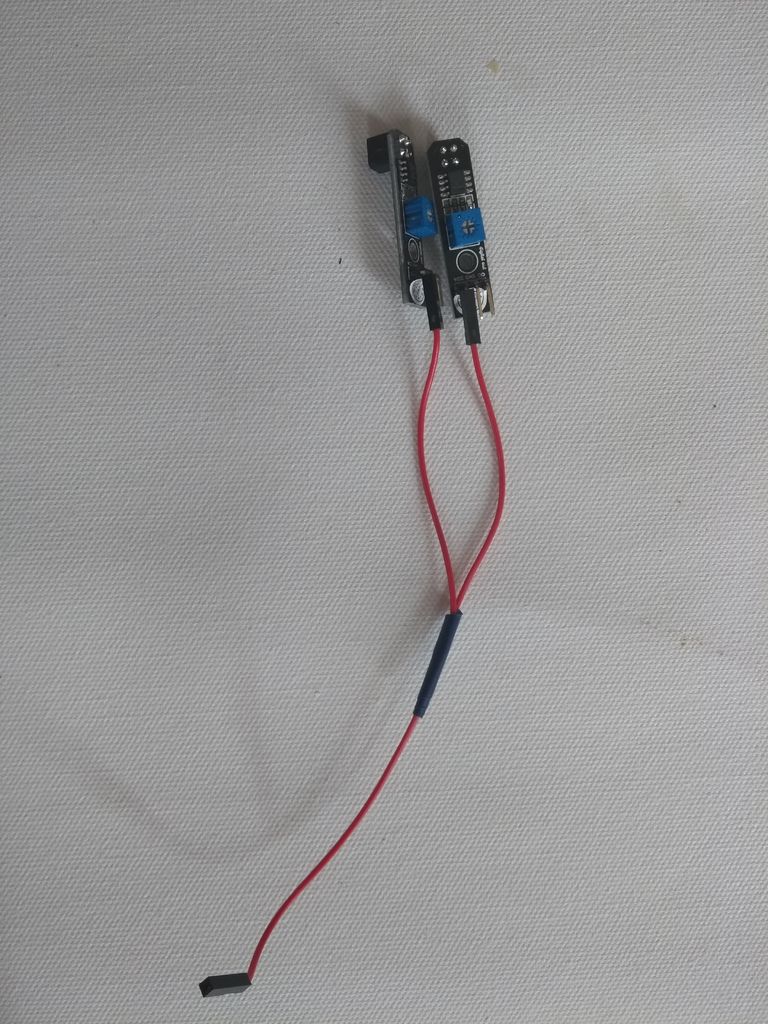
將一根焊接在一起的三線跨接線引出一根,并將其兩端連接到 VCC 分別位于兩個傳感器的引腳上。
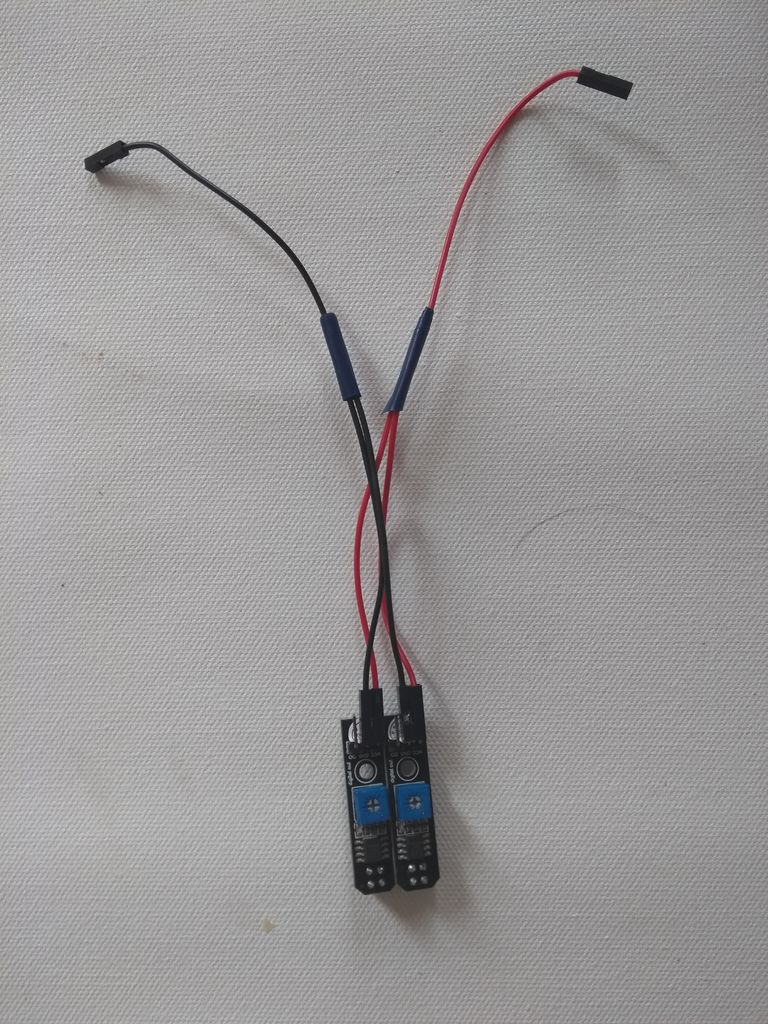
拿第二根焊接的跨接引線,并將兩端連接到每個線傳感器的 GND 引腳上。
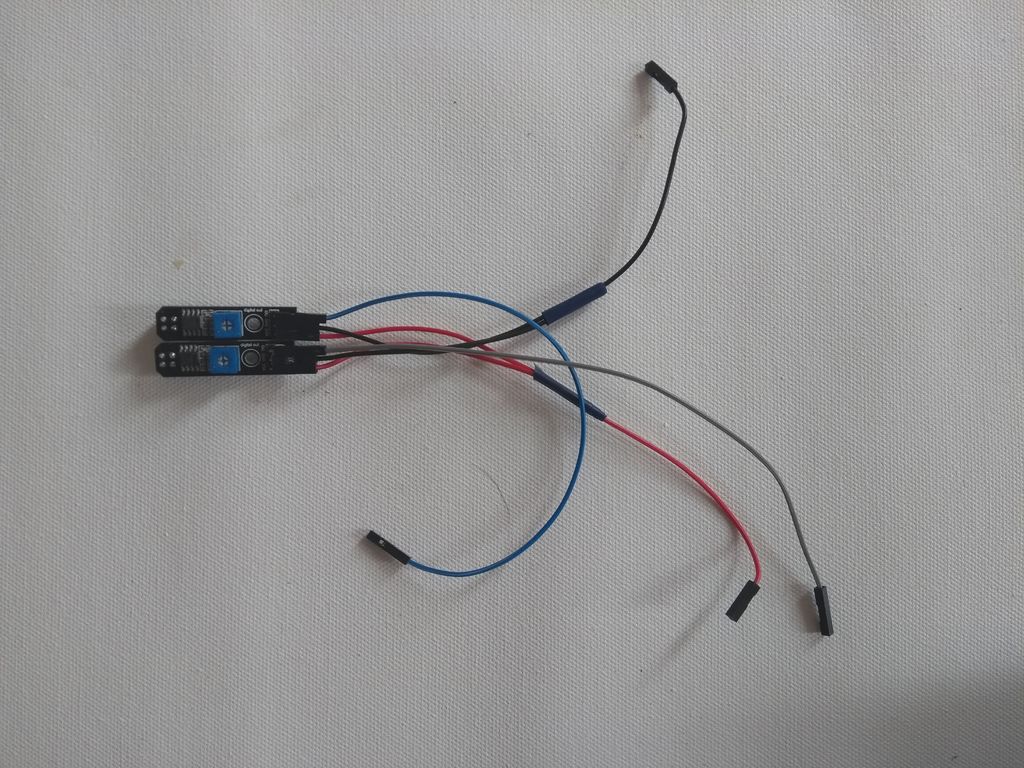
接剩下的兩根單跳線,并將每根跳線連接到每個線傳感器上的 DO 引腳。
現(xiàn)在連接 VCC 引腳將兩個線感測器連接到Raspberry Pi上的 5V 引腳,并將傳感器的 GND 引腳連接到Raspberry Pi上的 GND 引腳。兩個 DO 引腳中的每一個都可以連接到任何編號的GPIO引腳。在此示例中,使用了 GPIO 17 和 GPIO 27 引腳。
步驟7:測試線路傳感器
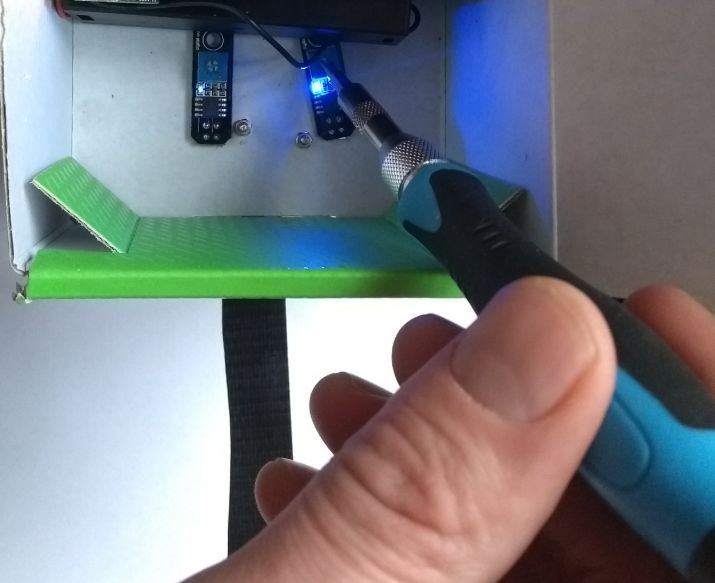
這是一個非常簡單的步驟。您的線傳感器上有一個LED,當(dāng)通電時,該LED保持點亮。但是,一旦將其暴露在黑線中,它們就會消失。線傳感器應(yīng)該是這種情況。
如果您認(rèn)為它太靈敏,請使用螺絲刀并通過其電位計對其進行調(diào)整。
第8步:將程序插入Python
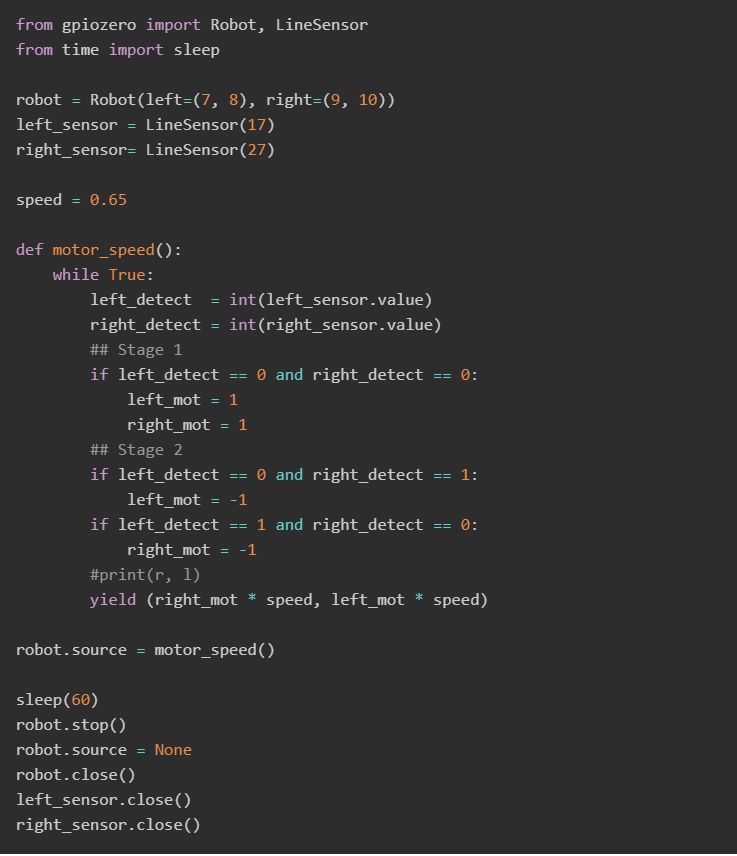
插入這些代碼行并運行它,您應(yīng)該擁有一個可以在軌道上完美運行的機器人。
-
機器人
+關(guān)注
關(guān)注
211文章
28389瀏覽量
206924 -
電機控制板
+關(guān)注
關(guān)注
0文章
6瀏覽量
6922
發(fā)布評論請先 登錄
相關(guān)推薦
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
agv搬運機器人是怎么實現(xiàn)無人搬運的?

焊接機器人拖拽軌跡怎么設(shè)置

愛普生SGPM01助力智能泳池清潔機器人導(dǎo)航方案
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
擎耀越野車射燈智能音樂律動控制系統(tǒng)方案引領(lǐng)汽車照明新紀(jì)元
Al大模型機器人
自動停車機器人,如何快速構(gòu)建?

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設(shè)計
其利天下技術(shù)·搭載無刷電機的掃地機器人的前景如何?
如何確保越野車電機配件氣密性:測試方案詳解
EPSON助力智能泳池清潔機器人導(dǎo)航

擎耀解碼匹配進口硬派越野吉普牧馬人原車CAN協(xié)議應(yīng)用LED大燈改裝

EPSON愛普生助力智能泳池清潔機器人導(dǎo)航方案應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論