


步驟1:MoSCoW,材料和工具
材料
Arduino Uno
Arduino USB電纜(用于將arduino連接到您的電腦)
面包板
壓電揚聲器
觸摸傳感器(FSR-Interlink 406)
12個5mm LED的
6 220歐姆電阻
47k歐姆電阻
15 M至M的跳線
24 M至F的跳線
丙烯酸(用于激光切割)*
用于激光打印機的材料*
工具:
3D打印機*
激光切割器*
膠槍*
*這只是用于制作身體。如果您無法使用這些工具,則還可以使用其他材料制成主體。
MoSCoW:
這是MoSCoW的一部分我在設計RoboCat時使用的要求
必須滿足:
機器人具有3D打印盒
機器人發出聲音
當機器人被撫摸回去時可以感覺到
機器人的LED眼睛
應該具有:
機器人的眼睛改變
可以打開或關閉機器人
可能有:
機器人上刻有徽標側面
機器人對明暗反應
機器人對傾斜做出反應
沒有:
機器人可以行走
步驟2:接線

知道了嗎?然后,我們開始吧!
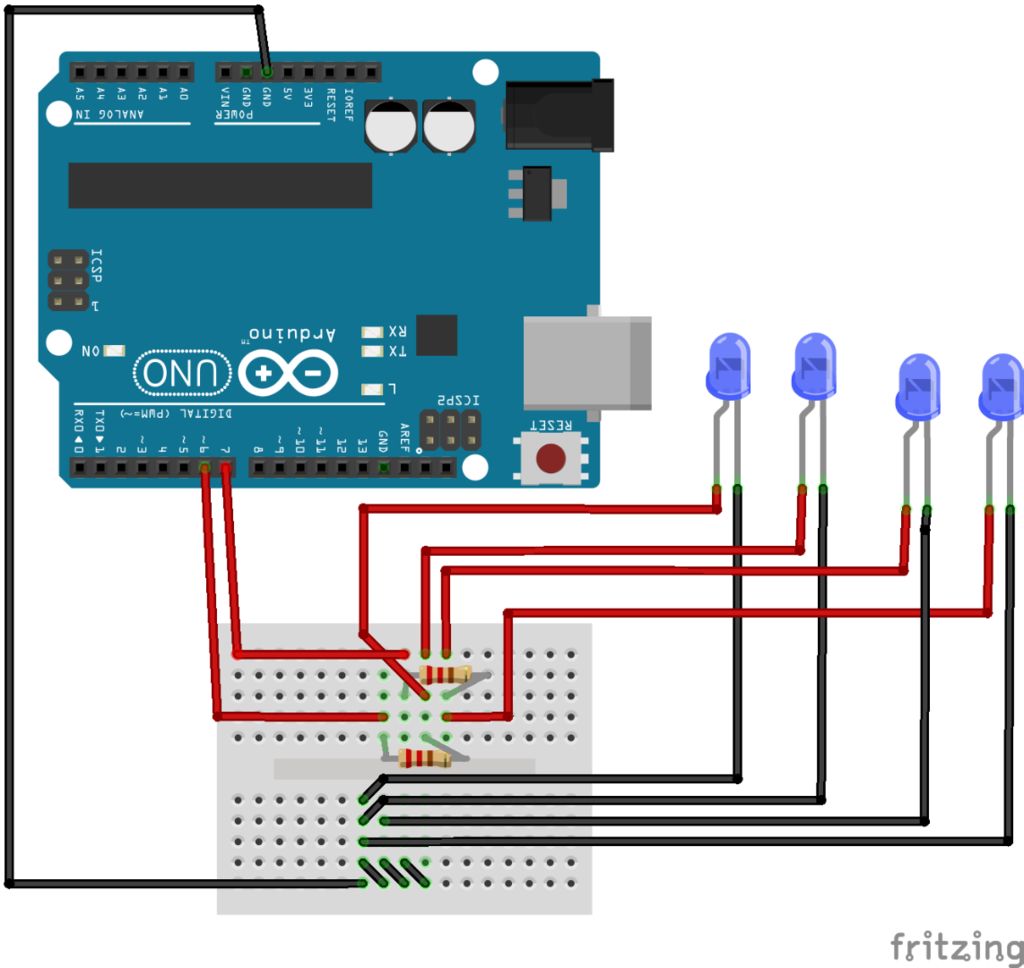
這里的圖顯示了所有事物的連接方式。第一個圖包含了所有內容,但有些混亂,因此我添加了一些額外的圖,以便您實際上可以了解發生了什么。
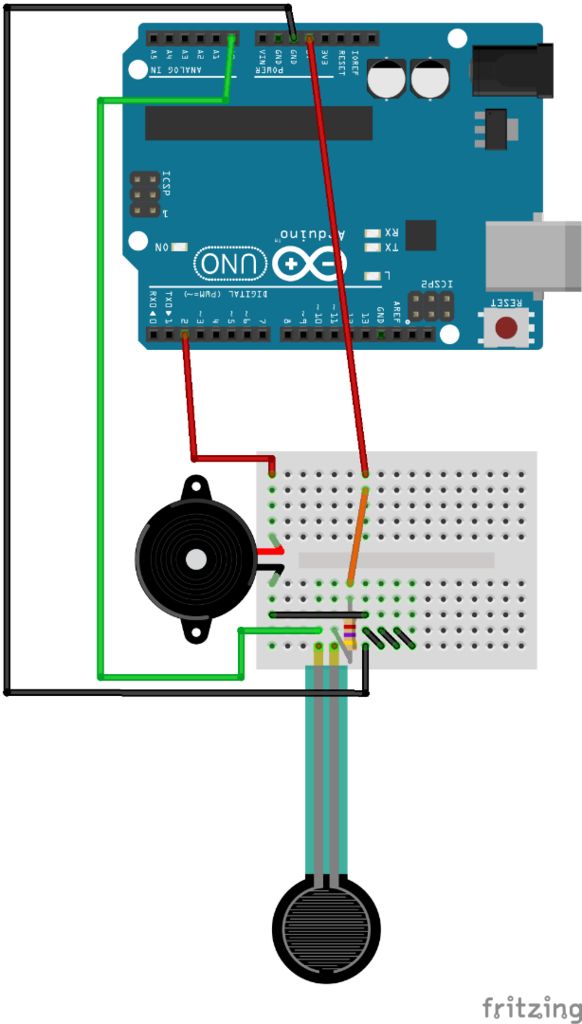
最簡單的方法是從壓電揚聲器和觸摸傳感器開始。壓電揚聲器連接到引腳2并接地,觸摸傳感器連接到5v和A0。觸摸傳感器之前有一個47k歐姆的電阻。
然后,我們將在引腳6、7、8、9、11和12上添加LED。您會在面包板上放置一整堆電纜在這里,請確保不要混淆其中的任何一個(這有助于對電線進行顏色編碼)。首先,我在試驗板上做了幾行以將LED放在上,并做了一些連接到地面的行。然后,我使用M/F跳線每行添加2個LED,并將另一端接地。我基本上在面包板上制作了3組相同的LED,僅在LED上就可以在圖像中看到其中設置LED的方式。
注意:要更改觸摸傳感器的靈敏度,您可以也可以嘗試將不同的電阻器代替47k歐姆電阻器。
第3步:代碼
因此,現在我們已完成所有接線完成,但是它什么也沒做,所以我們需要獲取一些代碼并將其上傳到Arduino板上。
步驟4:3D打印和激光切割
好吧,現在我們的創造物作用像只貓,但是看起來還不像一只貓。是時候制造身體了!
要制造身體,我們將使用激光切割機和3D打印機。如果您無法使用這些工具,則還可以使用其他材料并創造性地制作自己的身體。
我們將3D打印一個身體和一個頭部,并激光切割一條尾巴和一條
3d打印頭時,請確保您沒有更改尺寸(以便5mm LED完全適合孔中),并確保支撐架處于打開狀態,因為耳朵伸出而打印機無法在稀薄的空氣中打印。 (這在某些3D打印機上是標準配置,但是在某些情況下,您需要自己打開它)
我實際上沒有時間自己打印主體,因此我實際上無法測試所有內容是否都適合其中,我懷疑它可能不適合,因此您可能需要擺弄一些。觸摸傳感器也沒有孔,也沒有連接到人體中arduino的電線,因此您需要將這些孔鋸掉。
激光印刷板可能會落后嘴,鼻子和胡須為貓提供更多的顏色,所以您看不到里面的東西(盡管沒有必要放進去,如果您不喜歡的話就放進去,只需把它留在后面),尾巴就在后面
第5步:將它們放在一起
我們要做的最后幾件事。
我們仍然需要將LED放在頭上。您確實需要確保將LED插入正確的孔中,否則,眼睛的外觀將不符合預期。連接到引腳6的LED進入上部外部孔,連接到7的LED緊挨著這些(因此不低于),連接到8的LED緊挨著那些。連接到引腳9的LED是下部外部孔,旁邊的11是LED,旁邊的是12 LED。
您可以放置身體和頭部連同膠槍一起使用,這也適合放在面板和尾巴中。如果您自己制作身體/零件,則可以按照使用的最佳方式將其固定。
責任編輯:wv
-
機器人
+關注
關注
213文章
29770瀏覽量
213148 -
Arduino
+關注
關注
190文章
6499瀏覽量
192386
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
什么是機器人?追蹤機器人技術的發展和未來
你聽說過嘛?用樹莓派機器人遠程逗貓...






 工商網監
工商網監

評論