") 如何制作一個(gè)藍(lán)牙遠(yuǎn)程控制的六足機(jī)器人
如何制作一個(gè)藍(lán)牙遠(yuǎn)程控制的六足機(jī)器人
步驟1:所需條件
設(shè)備
烙鐵,3D打印機(jī),噴水切割機(jī)。
材料
PLA 3D打印燈絲
硅
鋼踏板
M3X20螺釘
M3X10螺釘
M3螺母
M3墊圈
623zz球軸承
CAD軟件
組件
(12)伺服馬達(dá)MG995
(2)9V電池
(1)6V,7Amp電池
GoPro攝像頭
Arduino MEGA
Arduino NANO
(2)游戲桿
(2)HC-05藍(lán)牙模塊
(1)10K電位器
第2步:力學(xué)和設(shè)計(jì)所需的零件
M機(jī)械設(shè)計(jì)
機(jī)械設(shè)計(jì)從每條腿要使用的伺服電動(dòng)機(jī)的數(shù)量開(kāi)始。在該項(xiàng)目中,決定每條腿使用2個(gè)伺服器,從而使其具有更大的自由度,并使其自然性顯著。顯然要提到的是,在任何類(lèi)型的機(jī)械,機(jī)器或機(jī)器人中,自由度越大,動(dòng)作和動(dòng)作的自然性就越大。在此項(xiàng)目的計(jì)劃,要求和限制范圍內(nèi),將使用12個(gè)執(zhí)行器,每條腿2個(gè)。如前所述,伺服電機(jī)將是腿的主要組成部分,假設(shè)它們是代表機(jī)器人關(guān)節(jié)的那些點(diǎn)。通過(guò)觸發(fā)機(jī)器的不同運(yùn)動(dòng),一起模擬運(yùn)動(dòng)使其行走。根據(jù)前面提到的伺服電機(jī)的尺寸,設(shè)計(jì)了一個(gè)外殼,其中裝有這種類(lèi)型的執(zhí)行器。這一個(gè)的尺寸為設(shè)計(jì)一種緊固系統(tǒng)提供了參考點(diǎn),該緊固系統(tǒng)用于支撐整個(gè)腿部的支撐元件和連接器。伺服電機(jī)中的一個(gè)垂直放置,另一個(gè)水平放置,這主要是由于其軸的旋轉(zhuǎn)方向和激活其所擰緊的元件的方向,從而使x軸或y軸產(chǎn)生運(yùn)動(dòng),這是行走的必要條件。六足動(dòng)物。查看圖形和圖像時(shí),您可以看到它們組裝到機(jī)器人主基板上的點(diǎn)。如果以直立的姿勢(shì)看一下伺服電機(jī),您會(huì)發(fā)現(xiàn)它位于兩個(gè)板之間。其中一個(gè)擰在上部,另一個(gè)擰在下部。從那里,連接器和桿將有助于在水平位置支撐第二個(gè)伺服電機(jī),從中可以將4種不同類(lèi)型的連接器用作支腿的一部分。這些允許機(jī)械運(yùn)動(dòng)模擬并激活該元件的抬起和移動(dòng)。其中包括保持腳的最大部分的這兩個(gè)桿,腳被支撐在該桿上并幾乎占據(jù)了機(jī)器人的全部重量。
如前所述,定義您的設(shè)計(jì)存在局限性。它們可以是不同的類(lèi)型,無(wú)論是機(jī)械的,經(jīng)濟(jì)的還是用于機(jī)器操作的任何其他重要資源。這些機(jī)械要素;在這種情況下,伺服電機(jī)確定了機(jī)器人的尺寸。這就是為什么本手冊(cè)中的設(shè)計(jì)具有如此尺寸的原因,因?yàn)樗鼈冎饕獜倪x定的執(zhí)行器和控制器開(kāi)始,之后又添加了大電池。
重要的是,機(jī)械設(shè)計(jì)未定義為要復(fù)制。甚至可以通過(guò)模擬主要元件,條和/或連接器的應(yīng)力和疲勞來(lái)優(yōu)化。考慮到所選的制造方法(增材制造),您可以充分利用設(shè)計(jì),模擬和打印最適合您的負(fù)載和應(yīng)用的實(shí)體。始終根據(jù)需要考慮支撐,緊固件和軸承的基本元素。這取決于他們?cè)跈C(jī)制中扮演的角色。因此,您應(yīng)該考慮這些元素的規(guī)格,以便它們與腿的其他部分一起在適當(dāng)?shù)奈恢谩?/p>
步驟3:設(shè)計(jì)電子產(chǎn)品
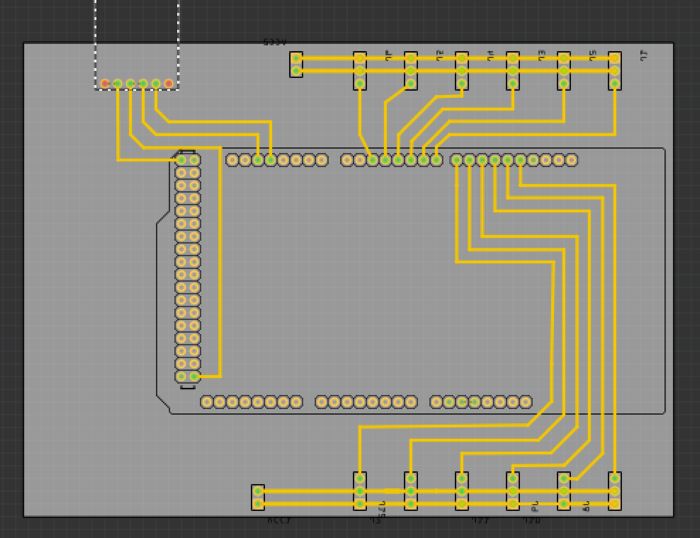
2個(gè)為機(jī)器人設(shè)計(jì)的PCB。
1是將要安裝在機(jī)器人中的主板,第二個(gè)是電子設(shè)備在遙控器上。使用Fritzing軟件設(shè)計(jì)PCB,然后使用CNC雕刻機(jī)進(jìn)行PCB雕刻。
主PCB包括Arduino Mega和藍(lán)牙模塊,所有伺服器也都連接在一起,并使用直接從電池到2個(gè)螺釘端子的兩根電源線(xiàn)。
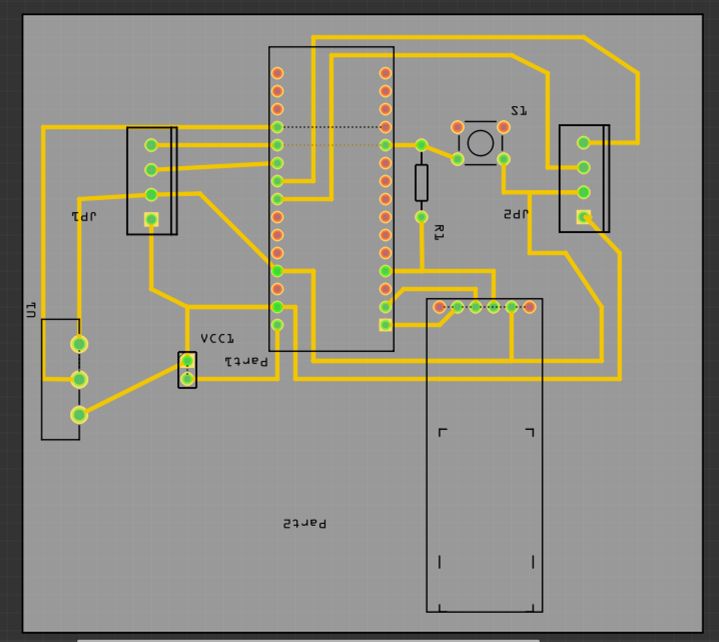
從安裝Arduino Nano開(kāi)始,遙控器PCB的組件更多,但結(jié)構(gòu)更緊湊,它連接了兩個(gè)操縱桿以控制Hexapod的方向和運(yùn)動(dòng),一個(gè)按鈕帶有相應(yīng)的220Ohms電阻,一個(gè)電位器來(lái)調(diào)節(jié)機(jī)器人及其藍(lán)牙模塊HC05的高度。所有電路板均使用9V電池供電,而其上的元件均使用Arduino電路板的5v輸出供電。
設(shè)計(jì)完成后,可以使用專(zhuān)用的CNC PCB機(jī)械加工工具制造PCB。然后您可以繼續(xù)在板上安裝所有組件。
步驟4:步驟4:組裝
在獲得了所有可用的印刷零件,螺釘和軸承以及組裝機(jī)器人的工具之后,可以考慮組裝相應(yīng)的零件,從此開(kāi)始。垂直伺服器的底座組裝成具有一個(gè)上板和一個(gè)下板,這些板中的6個(gè)在內(nèi)部裝有伺服電機(jī)。現(xiàn)在,將與伺服電機(jī)軸的聯(lián)軸器擰緊,并將該零件連接到該零件上:“ JuntaServos”,在其對(duì)應(yīng)件中將具有其對(duì)應(yīng)的軸承,以促進(jìn)兩個(gè)零件之間的旋轉(zhuǎn)。然后將其連接到第二個(gè)伺服器,水平伺服器以及與其他2個(gè)段鏈接的各自的一組桿,從而直接連接到鋼頭。兩者均用指定的螺釘固定。要完成腿部操作,需要在壓力下插入印有PLA的尖端。
必須重復(fù)此過(guò)程6次,以組裝支撐并激活機(jī)器人的6條腿部。最后;
步驟5:步驟5:編碼
在此部分中,將描述了一些代碼的工作原理。它將分為兩部分,遙控器代碼和六腳架代碼。
首先是控制器。您想讀取操縱桿中電位計(jì)的模擬值,建議對(duì)這些值進(jìn)行過(guò)濾,并且僅當(dāng)這些值的變化超出代碼中規(guī)定的范圍時(shí)才足以獲取這些值。發(fā)生這種情況時(shí),將使用Arduino Serial.write函數(shù)通過(guò)藍(lán)牙發(fā)送一個(gè)字符數(shù)組類(lèi)型值,以指示其中一個(gè)值已更改,以便一旦另一個(gè)藍(lán)牙模塊接收到它們后便可以執(zhí)行某些操作。
現(xiàn)在,六足程序代碼也可以分為兩部分。
第一部分是根據(jù)藍(lán)牙接收到的消息指定要執(zhí)行的功能,第二部分是完成創(chuàng)建六腳架所執(zhí)行功能的必要步驟,例如向前走,向后,轉(zhuǎn)彎等。在代碼中要做的第一件事是為藍(lán)牙通信的操作以及舵機(jī)的功能及其在每條腿中的運(yùn)動(dòng)指定必要的變量。
Serial.readBytesUntil函數(shù)用于獲取整個(gè)字符數(shù)組,即6,所有命令具有6個(gè)字符,這是非常重要的考慮因素。在Arduino的論壇中,您可以找到有關(guān)如何選擇最佳參數(shù)的參考,以便正確接收消息。獲得完整的消息后,將其與strcmp()函數(shù)進(jìn)行比較,然后使用一組為變量分配值的if函數(shù)在開(kāi)關(guān)函數(shù)中分配六足動(dòng)物的函數(shù)。
還有一些附加功能,其中一個(gè)功能在接收到命令“ POTVAL”時(shí)會(huì)更改機(jī)器人的高度,另一個(gè)功能會(huì)更改每條腿的相對(duì)高度及其靜態(tài)旋轉(zhuǎn),這可以通過(guò)操縱桿以及按下按鈕來(lái)實(shí)現(xiàn)。在控件中,將在六腳架代碼中接收到“ BOTTON”命令,并更改六腳架的移動(dòng)速度。
步驟6:測(cè)試
在以下視頻顯示了六足動(dòng)物如何隨時(shí)間演變,并查看測(cè)試結(jié)果和最終結(jié)果。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28468瀏覽量
207358 -
藍(lán)牙
+關(guān)注
關(guān)注
114文章
5831瀏覽量
170524
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
開(kāi)源項(xiàng)目!OpenCat—— 一個(gè)全能的平價(jià)四足機(jī)器人
焊接機(jī)器人六個(gè)軸分別是什么作用

認(rèn)識(shí)機(jī)器人與CW32四足機(jī)器人控制項(xiàng)目
【CW32開(kāi)發(fā)】初探四足機(jī)器人

山田光學(xué):一體化機(jī)芯在機(jī)器人領(lǐng)域的創(chuàng)新應(yīng)用
開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
工業(yè)機(jī)器人數(shù)據(jù)采集遠(yuǎn)程監(jiān)控平臺(tái)是什么
如何使用PLC控制機(jī)器人
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
上海交大導(dǎo)盲六足機(jī)器人:視覺(jué)環(huán)境感知,自主導(dǎo)航與躲避
六軸焊接機(jī)器人的操作流程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論