 機器的大腦是什么?
機器的大腦是什么?
一場突發悲劇敲響了警鐘:2011年日本大地震和海嘯引發福島第一核電站核事故,給眾多機器人專家敲響了警鐘。這場事故發生后,媒體報道高劑量輻射阻礙了工人實施緊急措施,例如操作壓力閥。其實這是一項非常合適機器人的任務,但無論是日本還是其他國家的機器人都沒有能力關閉這個閥門。福島核事故使機器人界意識到:技術需要走出實驗室,進入現實世界。 自福島核事故以來,救災機器人的研發已經取得了重大進展。世界各地的研究組織演示了可在碎石上行駛的無人駕駛車輛、可通過狹窄縫隙的機器蛇,以及可從空中繪制現場地圖的無人機。研究人員還在制造類人機器人,用于探查災害和執行關鍵任務,如操作和讀取儀表面板或運送急救設備。
盡管取得了諸多進步,但制造運動和決策能力可媲美應急人員的機器人仍然是一大挑戰。推開沉重的門、打開滅火器,以及一些簡單但費力的工作都需要一定的協調能力,而機器人尚未掌握這種協調能力。 遠程操作是突破這一限制的一種方法,人類操作人員可以連續不斷地遠程控制機器人,也可以在特定任務期間進行控制,幫助它超越自我,完成更多任務。 遠程操作機器人長期以來被應用于工業、航空航天和水下環境。近期,研究人員用動作捕捉系統進行了實驗,將人的動作實時傳輸給類人機器人:人在揮動手臂時,機器人也會模仿人的動作。為了獲得完全沉浸式的體驗,特殊的眼罩可以讓操作人員看到機器人通過攝像頭捕捉到的東西,觸覺背心和手套可以給操作人員帶來觸覺感知。 在麻省理工學院仿生機器人實驗室,我們的團隊正在進一步推動人與機器的融合,意在加速開發出實用的救災機器人。在美國國防部高級研究計劃局(DARPA)的支持下,我們正在構建遠程機器人系統,該系統由兩部分組成:一個具有靈活、敏捷行為能力的類人機器人,以及一種新型雙向人機界面,可以對操作人員的工作和機器人的動作進行雙向傳遞。因此,當機器人踩在廢墟上,開始失去平衡時,操作人員也會感受到這種不穩定,并本能地做出反應,避免跌倒。我們捕捉到這種身體反應,并將其發送回機器人,幫助它避免跌倒。通過這種人與機器人的連接,機器人可利用操作人員天生的運動技能和瞬間的反應來站穩。
這可以理解為,我們將人腦放入了機器中。
理想情況下,未來的救災機器人將擁有很大的自主權。有朝一日,我們希望能夠派遣機器人獨自進入著火的大樓搜尋遇難者,或者在損壞的工業設施中部署機器人,讓它找到需要關閉的閥門。我們要走的路還很長,因此越發對遠程操作感興趣。 近期,美國國防部高級研究計劃局的機器人挑戰賽和日本ImPACT Tough機器人挑戰賽等展示了遠程操作領域的各種可能性。災難現場的不可預測性是要求人工參與決策的一個主要原因。穿越這些混亂的環境需要高水平的適應程度,目前的人工智能算法還無法達到這一程度。
例如,如果自主機器人遇到一個門把手,但無法與數據庫中的門把手相匹配,則任務失敗。如果機器人的手臂被卡住,但不知如何脫身,則任務失敗。而人類可以通過現場學習和調整,來處理此類情況。我們每天都在這樣做,我們能夠識別物體形狀的變化,應對低能見度情況,可以在現場學會使用新工具。
人的運動技能也是如此。想象一下背著沉重的背包跑步。你可能比沒有負重跑得慢一點,距離短一些,但你仍然可以執行這項任務。我們的身體可以輕松地進行動態調整。 目前正在開發的遠程操作系統并不是為了取代腿式機器人保持自我平衡和執行其他任務的自主控制器。我們仍然在為機器人賦予盡可能多的自主性。但將機器人與人工結合,可同時利用兩種優勢:機器人的耐力和力量,以及人的適應性和認識能力。 我們的實驗室長久以來一直在探索如何在生物系統的啟發下設計出更好的機器。現有機器人無法執行所謂的力量操縱——比如敲開一大塊混凝土或用斧頭砸門等費大力氣的動作,這是它們的一個特殊局限。大多機器人都設計用于比較柔和、精密的移動和溫和的接觸。 我們針對這種需要較大力量的操作,設計了高效機器人機構和機電系統(Highly Efficient Robotic Mechanisms and Electromechanical System,HERMES)。HERMES機器人相對較輕,僅45公斤,但卻很強壯。它的身高大約是普通人的90%,可讓它在人的活動空間中自然地活動。 我們沒有使用常規的直流電機,而是借助多年來開發Cheetah平臺的經驗, 制作了專門的執行器,為HERMES的關節提供動力。Cheetah是能夠做出沖刺和跳躍等爆發性動作的四足機器人。執行器包括與行星齒輪箱耦合的無刷直流電動機。所謂的行星齒輪箱中有3個“行星”齒輪圍繞1個“太陽”齒輪旋轉,可產生很大的扭矩。機器人的肩膀和臀部受直接驅動,而膝蓋和肘部由連接到驅動器的金屬棒驅動。因而HERMES不像其他類人機器人那么僵硬,能夠吸收機械沖擊,而齒輪不會被撞擊成碎片。
第一次啟動HERMES時,它只有兩條腿,不能獨自站立,所以我們把它掛在一條背帶上。我們給它的左腿編寫了踢腿程序,進行簡單的測試,并將實驗室內視線所及的第一樣東西——塑料垃圾桶放在機器人面前。我們滿意地看到HERMES將垃圾桶踢到房間的另一邊。
為控制HERMES而構建的人機界面不同于傳統的人機界面,它依賴于操作人員的反應來增強機器人的穩定性。我們稱之為平衡反饋界面(Balance-Feedback Inetface,BFI)。 歷經數月時間和多次迭代,BFI開發完成。最初的BFI理念與斯蒂芬?斯皮爾伯格執導的電影《頭號玩家》中出現的全身虛擬現實套裝有些許相似之處。開發一直處于設計階段。我們發現,追蹤和移動人體中200多塊骨骼和600多塊肌肉并不是一個簡單的任務,所以我們決定從更簡單的系統著手。 與HERMES配合時,操作人員站在一個邊長約90厘米的方形平臺上。測壓元件測量平臺表面的受力,這樣我們就知道操作人員雙腳踩在了哪個位置。將一組連桿連接到操作人員的四肢和腰部(人體大致的質心位置),使用旋轉編碼器精確測量1厘米以內的位移。其中有些連桿不僅用于傳感,它們還配備馬達,用于向操作人員身體施加力和扭矩。如果將你綁在BFI上,這些連桿可以向你的身體施加80牛頓的力,足以把你推動。 我們設置了兩***立的計算機來控制HERMES和BFI。每臺計算機運行自己的控制回路,但彼此不斷交換數據。在每個回路之初,HERMES收集自身姿勢數據,并將該數據與從BFI接收到的操作人員姿勢數據進行對比。根據對比數據的不同,機器人調整執行器,并立即將新的姿勢數據發送給BFI。之后,BFI執行類似的控制回路來調整操作人員的姿勢。此過程每秒重復1000次。 為了讓雙方能在如此高的刷新速率下操作,我們不得不濃縮共享的信息。例如,BFI只發送人的質心位置和每只手腳的相對位置,而不是發送操作人員姿勢的詳細信息。之后,機器人的計算機將測量值按HERMES的尺寸比例進行縮放,HERMES會參考并復制這一姿勢。與其他雙向遠程操作回路相似,這種耦合可能會引起振蕩或不穩定。我們通過微調那些用于映射操作人員和機器人姿勢的比例參數,使這種不穩定最小化。 在測試BFI時,我們中的一員(本文作者約翰?拉莫斯Jo?o Ramos)主動成為操作人員。畢竟,系統核心部分的設計師是最適合親身體驗以進行調試的。 在最初的一次實驗中,我們使用一種早期平衡算法測試HERMES,觀察人和機器人在耦合時的行為。測試中,一名研究人員用橡皮錘擊打HERMES的上半身。每一次擊打,BFI都對拉莫斯產生類似的震動,拉莫斯反射性地移動身體以保持平衡,從而使機器人也能把控自己。 到此刻為止,HERMES還只有兩條腿和一個軀干,但我們最終完成了身體的其余部分。手臂使用的驅動器與腿和手使用的驅動器相同,由3D打印部件制成,并用碳纖維加固。頭部有一個立體攝像頭,可將視頻傳輸到操作人員佩戴的頭罩上。我們還給它加了一頂安全帽。 在另一輪實驗中,我們讓HERMES在石膏板墻上打洞,用斧頭砸木板,在當地消防部門的監督下用滅火器撲滅可控的火苗。救災機器人不僅需要蠻力,為此HERMES和拉莫斯還合作進行了更靈巧的操作,比如把水壺里的水倒進杯中。 在每次操作人員綁著BFI模擬執行任務時,我們兜觀察機器人如何模仿這些動作。此外,我們還研究操作人員的反應對機器人幫助最大的場景。例如,當HERMES砸墻時,它的軀體會向后反彈;幾乎在同時,相應的力推向操作人員,他反射性地將身體前傾,幫助HERMES調整姿勢。 我們準備進行更多的測試,但又意識到HERMES太大,太強壯有力,不適用于我們想做的實驗。雖然類人大小的機器可以幫助完成實際任務,但移動很費時間,而且需要采取很多安全措施——畢竟它在揮舞著斧頭!想嘗試更多的動態行為,甚至是步行都很困難。我們認為HERMES需要一個弟弟。━━━━小HERMES是HERMES的縮小版。它使用同樣的高扭矩執行器,執行器安裝在軀干附近,而不是腿上。這樣腿部就可以更快地擺動。為了使設計更緊湊,我們減少了肢體運動軸的數量,用機器人術語說,也就是降低了自由度,由6個減少到3個,并用簡單的橡膠球替換了原有的兩趾足,每一個橡膠球內部都配有三軸力傳感器。 要將BFI連接到小HERMES,也需要進行相應調整。成人和小號機器人在尺寸上差別很大,當我們試圖將雙方的運動直接連接起來(如映射人的膝蓋和機器人膝蓋的位置)時,會導致它出現急促運動。我們需要一個不同的數學模型來協調這兩個系統。我們提出了一個可以跟蹤參數(如地面接觸力和操作人員質心)的模型,這個模型能夠捕捉操作人員想要做出的運動的“輪廓”,供小HERMES來執行。 在一次實驗中,我們讓操作人員踏步行進,起初很慢,然后加快。我們欣慰地看到小HERMES也以同樣的方式行進。當操作人員跳起來時,小HERMES也跟著跳了起來。
從我們拍攝的一系列照片中可以看到,人和機器人幾乎同時躍到半空中。我們還在機器人腳下放置了一些木頭作為障礙物,機器人的控制器能夠防止機器人跌倒。
我們的大部分工作還停留在初步階段,小HERMES無法自由地站立或走動。我們在它背上設置了一根撐桿,防止它前傾。某種程度上,我們想進一步開發這個機器人,讓它在實驗室里甚至是在戶外漫步,就像Cheetah和迷你Cheetah一樣(是的,Cheetah也有一個弟弟)。 ━━━━我們接下來需要應對一系列挑戰。其中之一是長時間使用BFI或完成精力高度集中的任務后,操作人員會感到精神疲勞。我們的實驗表明,同時控制自己的身體和機器人,大腦會很快感到疲勞。這在精細操作任務(比如往杯中倒水)中尤其明顯。在連續重復3次實驗后,操作人員不得不休息。 解決方案是讓操作人員和機器共同承擔穩定機器人的責任。如果HERMES執行的任務需要操作人員付出更多有意識的努力,那么操作人員不必保持機器人平衡;自主控制器可以控制機器人平衡。識別這類場景的一個方法是跟蹤操作人員的視線。凝視的目光表明這是一項耗費腦力的任務,在此情況下,應當啟用自主平衡模式。 系統的另一個障礙是傳輸延遲,這也是所有遠程操作系統面臨的障礙。假設你正在遠程控制機器人,你的命令和機器人的響應之間有1秒的延遲。你可能仍然能夠遠程操作,但如果延遲變大,就有可能會失去判斷,無法執行操作。我們計劃依靠新型無線技術,如5G,來提供低延遲和高通量的傳輸。 最后,我們想要探索一些大膽的新設計。HERMES和小HERMES是雙足機器人,但救援機器人不一定必須是雙足式的。四足機器人就一種有潛力的可能性,它能夠穿越崎嶇的地形,然后用后肢站立來執行操作任務,類似于一些靈長類動物。 我們期望將實驗室開發的兩類腿式機器人Cheetah和HERMES融合在一起,制造出行動迅速的四足機器人,它們能夠自主進入災難現場,然后變身兩足機器人,借用經驗豐富的急救人員的技能和反應能力。我們相信,這些技術將幫助緊急救援人員更有效、更安全地開展工作。 期待在不久的將來,機器人能夠做到隨時待命。
-
機器人
+關注
關注
211文章
28522瀏覽量
207531 -
無人駕駛
+關注
關注
98文章
4076瀏覽量
120631
原文標題:機器的大腦
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
邊緣AI來襲:安富利助力工業設備 “獨立思考”
一文帶你了解工業電腦

解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)

艾畢勝電子MT6501IC展現智能娛樂機器人的“超級大腦”
新品發布 穩石機器人最強大腦ROC1000「智控」未來

工業機器人AMR的最強大腦,你了解多少?

天津大學科學家突破人類大腦器官成功驅動機器人
工業機器人控制系統的主要功能
作為深度學習的代表,GPU是如何計算的?


斯坦福、伯克利大神教授創業給機器人造大腦,OpenAI紅杉搶著投5億

腦機接口:探尋大腦活動新解碼技術
人的大腦相當于什么水平的 GPU 和 CPU ?
新火種AI|腦洞照進現實!馬斯克正式官宣,已將芯片連入大腦...
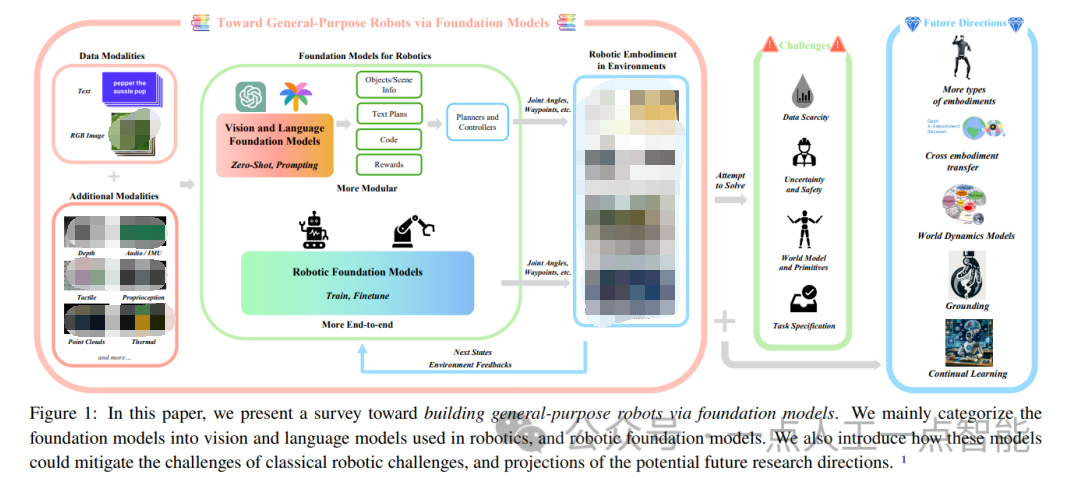
基礎模型能為機器人帶來怎樣的可能性?





 工商網監
工商網監
評論