 pid控制原理實例說明
pid控制原理實例說明
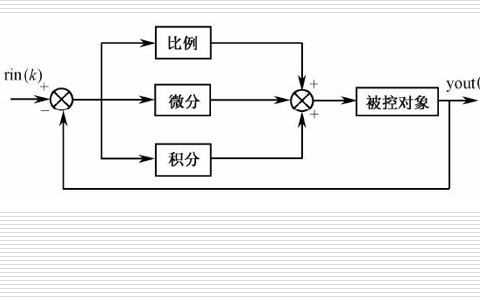
PID三個字母是比例,積分,微分的英文首字母縮寫。可見這三個功能在系統中都起作用,只是負責的功能不同。
別一看有微積分就嚇的不行,認為比較難,其實不是的,下面我就用大白話給你說一下吧,了解原理就行了,我感覺沒必要套用教課書上的模式,弄一大堆公式。我再給你畫幾張圖,很容易就明白的。
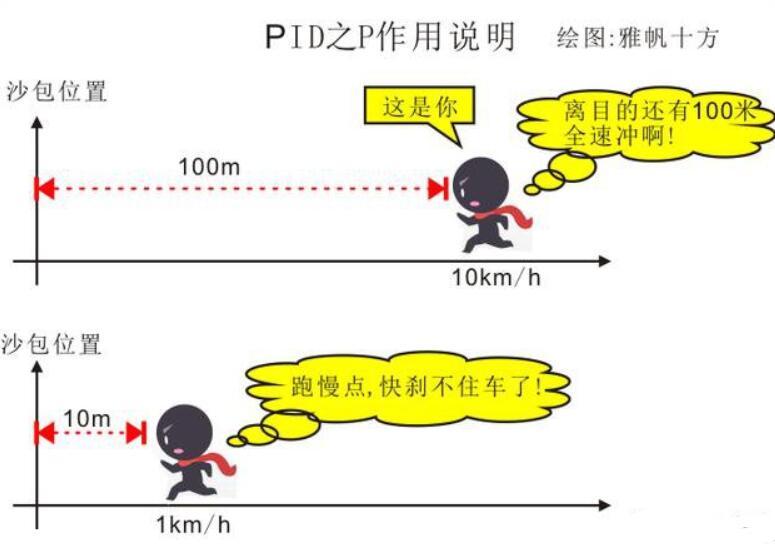
一、比例調節P
很實際一個例子,比如你跑向一個終點,當你離終點很遠時會全速跑,快接近終點時你會降速,基本上到達終點了,你也停下來了。那么這個模型用圖畫出來就是這個樣子的。
這里的100米,10米就是誤差,誤差越大,你跑的就越快,如果用數學建模的話,就是誤差乘以一個系數,這個系數就是PID中的P(比例)。
這個圖中的比例就是100,你看100m時,乘以100你就用10km/h去跑,10m時乘以100你就用1km/h去跑。
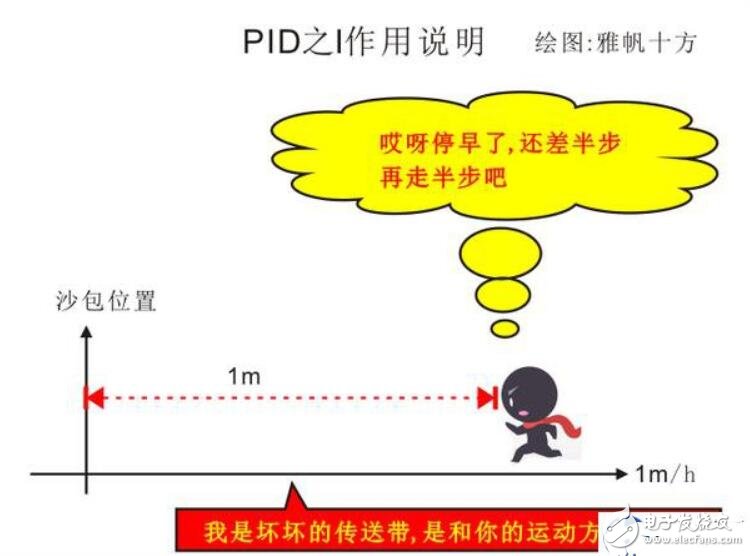
二、積分調節I
積分調節只有你在快接近目標時才起主要作用。比如說離目標還有1m時。積分是調節誤差的,并且是隨著時間是累計的(時間越大,這個誤差表現的越明顯,因為是誤差乘以時間),這個時候就要考慮傳送帶的因素了。比如現在是1米,你不向前走一步去補償就拿不到沙包,并且隨著時間的流失,你是會向后移動的。誤差會越來越大,1米,2米。
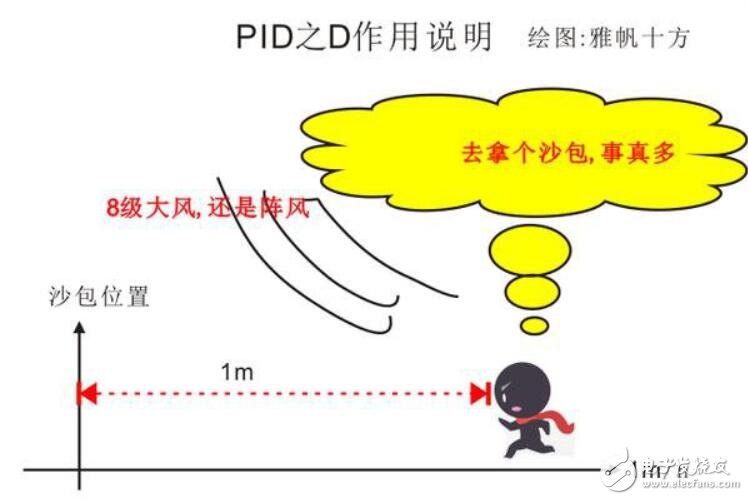
三、微分調節D
微分就是調節變化的快慢。比如說這時候有個8級大風,哎呀你老慘了。
注意我說的風是陣風,就是一陣有一陣沒的那種,以體現變化量。8級大的風對你的速度肯定有影響的。
那么這個時候你就會自動根據風的大小調節速度。風大你就多使點勁,風小你就少使點勁。這個使勁的多少就是微分系數。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PID
+關注
關注
35文章
1472瀏覽量
85484 -
PID控制
+關注
關注
10文章
460瀏覽量
40091
發布評論請先 登錄
相關推薦
基于Linux的實時數字控制系統設計
本文主要分析了半實物仿真中實時數字控制系統的特征及要求,并對實時控制和實時系統作了簡要的分析。最后結合一個對直流電機進行PID 控制的實例,
發表于 09-08 15:59
?6次下載
基于Linux的實時數字控制系統設計
本文主要分析了半實物仿真中實時數字控制系統的特征及要求,并對實時控制和實時系統作了簡要的分析。最后結合一個對直流電機進行PID控制的實例,
發表于 07-20 17:17
?18次下載
13個基于PID控制器的設計實例
PID控制器(比例-積分-微分控制器)是一個在工業控制應用中常見的反饋回路部件,由比例單元比例P(proportion)、積分單元I(integration)和微分單元D
發表于 11-15 11:36
?72次下載
先進PID控制及其MATLAB仿真的詳細資料說明
本文檔詳細介紹的是先進PID控制及其MATLAB仿真的詳細資料說明主要內容包括了:1.PID控制原理,2.連續系統的模擬
發表于 02-25 08:00
?11次下載
使用Model Composer設計PID控制器的Versal ACAP應用說明
電子發燒友網站提供《使用Model Composer設計PID控制器的Versal ACAP應用說明.pdf》資料免費下載
發表于 09-14 14:30
?0次下載






 工商網監
工商網監
評論