") 使用GD32的嵌入式實(shí)時(shí)控制系統(tǒng)
使用GD32的嵌入式實(shí)時(shí)控制系統(tǒng)
本文基于GD32微控制器和RT-Thread實(shí)時(shí)操作系統(tǒng),構(gòu)建了一種軟硬件自主可控的嵌入式實(shí)時(shí)控制系統(tǒng)。研究了RT-Thread操作系統(tǒng)在GD32芯片開發(fā)板上的移植方法和驅(qū)動(dòng)程序改寫,并編寫多任務(wù)應(yīng)用程序測(cè)試了系統(tǒng)的運(yùn)行穩(wěn)定可靠。為嵌入式控制系統(tǒng)的發(fā)展提供了一種技術(shù)實(shí)現(xiàn)途徑。
引 言
由微控制器和實(shí)時(shí)操作系統(tǒng)共同構(gòu)成的嵌入式實(shí)時(shí)控制系統(tǒng)在工業(yè)生產(chǎn)、交通運(yùn)輸、能源供給、國(guó)防裝備等眾多領(lǐng)域被廣泛使用,是實(shí)現(xiàn)自動(dòng)化技術(shù)的核心中樞。目前,國(guó)內(nèi)所采用的嵌入式實(shí)時(shí)控制系統(tǒng)大多基于國(guó)外的微控制器芯片和軟件產(chǎn)品,在“棱鏡門”和“Stuxnet病毒”事件后關(guān)鍵領(lǐng)域所采用的嵌入式系統(tǒng)安全問(wèn)題已被國(guó)內(nèi)用戶所重視,發(fā)展自主可控、安全可靠的嵌入式實(shí)時(shí)控制系統(tǒng)已成為必然趨勢(shì)。
伴隨微控制器芯片和實(shí)時(shí)操作系統(tǒng)軟件的不斷發(fā)展和日趨成熟,基于國(guó)產(chǎn)軟、硬件產(chǎn)品構(gòu)建自主可控的嵌入式實(shí)時(shí)控制系統(tǒng)已經(jīng)具備實(shí)現(xiàn)條件。本文采用具有ARM Cortex-M3內(nèi)核的微控制器GD32F207芯片和RT-Thread實(shí)時(shí)操作系統(tǒng)建立了一套完全國(guó)產(chǎn)化的嵌入式實(shí)時(shí)控制系統(tǒng),為國(guó)產(chǎn)自主可控嵌入式實(shí)時(shí)控制系統(tǒng)的建立及應(yīng)用進(jìn)行了技術(shù)經(jīng)驗(yàn)總結(jié)和有益探索。
01
嵌入式實(shí)時(shí)控制系統(tǒng)的構(gòu)成
嵌入式系統(tǒng)與通用計(jì)算機(jī)系統(tǒng)在體系結(jié)構(gòu)上具有相似性,都是由主控制器芯片和外圍功能芯片構(gòu)成硬件電路基礎(chǔ),再由可提供底層硬件操作功能的軟件作為操作系統(tǒng),用戶最終通過(guò)操作系統(tǒng)對(duì)硬件進(jìn)行訪問(wèn)和控制;嵌入式系統(tǒng)通常針對(duì)某個(gè)特定控制任務(wù)設(shè)計(jì),因而具有實(shí)時(shí)處理能力、可靠性的要求,通用計(jì)算機(jī)的處理適用范圍廣,因此更注重兼容性而實(shí)時(shí)處理能力較弱。
1.1 GD32F207微控制器與開發(fā)板
GD32F2系列微控制器芯片為基于ARM Cortex-M3內(nèi)核架構(gòu)設(shè)計(jì)的產(chǎn)品,本文中采用的GD32F207ZET6芯片主頻最高可達(dá)120MHz,具有128KB的SRAM和512KB的Flash存儲(chǔ)容量,并且提供UART、ADC、以太網(wǎng)和LCD控制器等眾多外設(shè)功能接口,可以很大程度減少所需的外圍功能電路配置。Colibri-F207ZE開發(fā)板是基于該芯片設(shè)計(jì)的一款“口袋實(shí)驗(yàn)室”類型產(chǎn)品,如圖1所示,在板子上有與Arduino平臺(tái)引腳布局兼容的引出IO接口之外,還包括TFT顯示屏接口、2個(gè)用戶按鍵、3個(gè)LED指示燈、1個(gè)USB串口和板載GDLINK調(diào)試器功能。本文中將以此開發(fā)板作為硬件平臺(tái)構(gòu)建嵌入式控制系統(tǒng)。
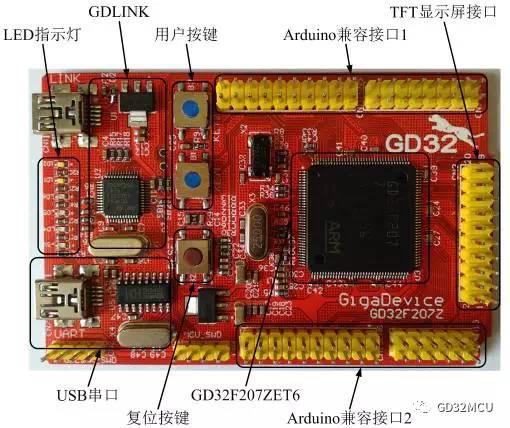
圖1 Colibri-F207ZE開發(fā)板
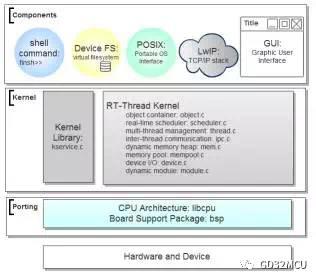
圖2 RT-Thread操作系統(tǒng)層次結(jié)構(gòu)
1.2 RT-Thread實(shí)時(shí)操作系統(tǒng)
RT-Thread嵌入式實(shí)時(shí)操作系統(tǒng)的開發(fā)始于2006年,并且遵循GPLv2+的版權(quán)許可協(xié)議。在經(jīng)過(guò)多年的能源、儀表、車輛等行業(yè)廣泛使用后,RT-Thread已經(jīng)被驗(yàn)證是一款穩(wěn)定、可靠的嵌入式實(shí)時(shí)操作系統(tǒng)。從文獻(xiàn)[6]中對(duì)RT-Thread與國(guó)際主流嵌入式實(shí)時(shí)操作系統(tǒng)進(jìn)行的比較中,也可看出其具有優(yōu)越的性能。RT-Thread系統(tǒng)的結(jié)構(gòu)層次框圖如圖2所示,其中內(nèi)核層(Kernel)是RT-Thread的關(guān)鍵部分涉及時(shí)鐘管理、實(shí)時(shí)調(diào)度、任務(wù)切換等核心操作;組件層(Components)主要提供Shell交互、文件系統(tǒng)、協(xié)議棧等附加操作功能;在內(nèi)核層與硬件之間是用于系統(tǒng)移植的軟件接口部分(Porting),其實(shí)現(xiàn)了操作系統(tǒng)對(duì)于硬件的各種具體操作功能。在本文中以最新發(fā)布的 RT-Thread 2.1.0版作為移植對(duì)象進(jìn)行分析、代碼修改并最終實(shí)現(xiàn)與Colibri-F207ZE開發(fā)板共同構(gòu)成嵌入式實(shí)時(shí)控制系統(tǒng)。
02
RT-Thread在GD32微控制器上的移植
RT-Thread操作系統(tǒng)已經(jīng)在GitHub上做了代碼托管,因此可直接從GitHub上下載獲取到RT-Thread 2.1.0版的源代碼壓縮文件包[7]。本文中采用MDK 5.16a版本的ARM開發(fā)工具進(jìn)行移植工作,并需要在MDK的Pack Installer中安裝GD32F2系列芯片的DFP支持包。在移植工作中完成了RT-Thread操作系統(tǒng)的串口通信和LED燈驅(qū)動(dòng)功能,可實(shí)現(xiàn)RT-Thread與主機(jī)之間的Shell交互操作和對(duì)測(cè)試程序中運(yùn)行任務(wù)的直接觀察。
2.1 RT-Thread目錄結(jié)構(gòu)的轉(zhuǎn)換
打開下載得到的RT-Thread源代碼文件包可看到按代碼功能分類的目錄結(jié)構(gòu),各文件夾所包含的內(nèi)容和用途分別為:
bsp文件夾:板級(jí)支持包,包含針對(duì)特定型號(hào)微控制器板卡和外部設(shè)備的驅(qū)動(dòng)程序。
components:對(duì)應(yīng)RT-Thread操作系統(tǒng)的組件層,包含RT-Thread核心功能之外的大部分附加操作功能以及硬件設(shè)備驅(qū)動(dòng)模型。
documentation:RT-Thread編程風(fēng)格說(shuō)明,對(duì)開發(fā)人員和用戶掌握RT-Thread提供指引。
examples:針對(duì)RT-Thread操作系統(tǒng)的應(yīng)用和測(cè)試程序示例。
include:RT-Thread操作系統(tǒng)使用的頭文件,可供外部應(yīng)用程序調(diào)用。
libcpu:CPU支持包,包含對(duì)各種常見CPU的底層驅(qū)動(dòng)程序,大部分為匯編語(yǔ)言開發(fā)。
src:對(duì)應(yīng)RT-Thread操作系統(tǒng)的內(nèi)核層,包含RT-Thread實(shí)時(shí)調(diào)度、時(shí)鐘管理、內(nèi)存分配、線程管理等全部核心功能。
tools:Scons構(gòu)建腳本文件,包含用于不同開發(fā)工具的各種腳本執(zhí)行文件。
根據(jù)RT-Thread源代碼文件包中各個(gè)文件夾的用途,結(jié)合GD32芯片所提供的外設(shè)固件庫(kù)、CMSIS配置文件和Colibri-F207ZE開發(fā)板的板級(jí)支持包構(gòu)建基于GD32F207芯片和RT-Thread操作系統(tǒng)的目錄結(jié)構(gòu),如圖3所示。其中App文件夾中包括RT-Thread的啟動(dòng)文件startup.c和用戶開發(fā)的應(yīng)用程序;GD32F207ZET6文件夾中包括硬件相關(guān)的兩個(gè)子文件夾,Colibri_BSP中是開發(fā)板的外設(shè)驅(qū)動(dòng)程序,GD32F20x_StdPeriph_Driver中是GD32芯片所提供的外設(shè)固件庫(kù),芯片驅(qū)動(dòng)、配置和中斷處理文件;Obj文件夾中為MDK所建立的工程文件和存放編譯后得到的axf文件;RT-Thread210文件夾中包含RT-Thread操作系統(tǒng)的各軟件模塊,其為直接從源代碼文件包中相關(guān)內(nèi)容復(fù)制而來(lái)。
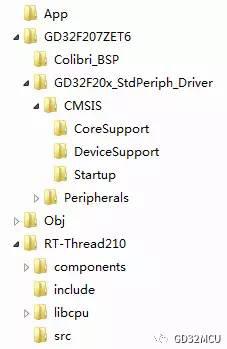
圖3 基于GD32芯片構(gòu)建的RT-Thread系統(tǒng)目錄結(jié)構(gòu)
2.2 項(xiàng)目工程的建立與驅(qū)動(dòng)程序改寫
在完成上述目錄結(jié)構(gòu)的構(gòu)建后,需要使用MDK開發(fā)工具將RT-Thread源代碼和GD32芯片的相關(guān)文件有機(jī)結(jié)合起來(lái),實(shí)現(xiàn)RT-Thread操作系統(tǒng)在Colibri-F207ZE開發(fā)板上的移植工作。在MDK工具內(nèi)部各個(gè)文件按照邏輯關(guān)系進(jìn)行分組管理,這里以GD32開頭的組和嵌入式系統(tǒng)硬件相關(guān),以RT開頭的組和操作系統(tǒng)軟件相關(guān),如圖4所示。這種分組結(jié)構(gòu)可有效實(shí)現(xiàn)軟硬件隔離,便于日后硬件部分或軟件部分代碼的升級(jí)替換工作。
2.2.1 軟硬件配置與代碼修改
在RT-Thread和GD32的配置中采用宏定義方式實(shí)現(xiàn)對(duì)所需軟件功能模塊的條件編譯和芯片性能參數(shù)設(shè)置,以達(dá)到對(duì)嵌入式系統(tǒng)軟、硬件裁剪和配置的目的。因此,在移植過(guò)程中需要對(duì)這些宏定義進(jìn)行有選擇的設(shè)置。
修改system_GD32f20x.c文件,該文件中主要實(shí)現(xiàn)GD32的系統(tǒng)時(shí)鐘和AHB、APB總線上掛接各部件的時(shí)鐘樹配置,本文中將系統(tǒng)時(shí)鐘設(shè)置為72MHz。
修改colibri_board.h文件,該文件主要用于設(shè)置GD32芯片內(nèi)、外部RAM的容量,根據(jù)本文中所使用的GD32F207ZET6芯片,將內(nèi)部RAM容量設(shè)置為128KB;開發(fā)板未擴(kuò)展外部RAM,將對(duì)應(yīng)的宏定義GD32_EXT_SRAM設(shè)置為0。
修改rtconfig.h文件,該文件主要用于RT-Thread操作系統(tǒng)的參數(shù)配置以及軟件功能模塊的裁剪。用戶可根據(jù)需要設(shè)置,保留的軟件功能模塊越多,則編譯后的HEX文件尺寸越大且需要的運(yùn)行RAM越多。本文中將RT-Thread最大優(yōu)先級(jí)RT_THREAD_PRIORITY_MAX設(shè)置為16;每秒節(jié)拍數(shù)RT_TICK_PER_SECOND設(shè)置為100;啟用了控制臺(tái)和Shell交互功能RT_USING_CONSOLE和RT_USING_FINSH以方便應(yīng)用程序調(diào)試。
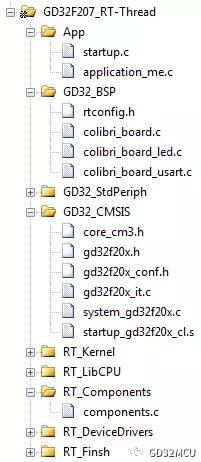
圖4 對(duì)GD32芯片和RT-Thread系統(tǒng)文件的分組管理
2.2.2 設(shè)備驅(qū)動(dòng)程序的改寫
編寫驅(qū)動(dòng)程序是操作系統(tǒng)移植過(guò)程中的重要一步,其用于實(shí)現(xiàn)軟件對(duì)硬件的最終操作。在RT-Thread中驅(qū)動(dòng)程序?qū)儆赑orting層采用了統(tǒng)一的設(shè)備驅(qū)動(dòng)模型框架,可以被應(yīng)用程序通過(guò)標(biāo)準(zhǔn)接口函數(shù)訪問(wèn)和調(diào)用,在文獻(xiàn)[6,8,9]中對(duì)RT-Thread設(shè)備驅(qū)動(dòng)框架的構(gòu)成進(jìn)行了說(shuō)明。由于GD32F2系列微控制器與STM32微控制器在系統(tǒng)結(jié)構(gòu)上具有相似性,因此在本文中通過(guò)對(duì)RT-Thread源代碼文件包中/bsp/stm32f10x/drivers子文件夾內(nèi)驅(qū)動(dòng)程序進(jìn)行改寫的方法實(shí)現(xiàn)Colibri-F207ZE開發(fā)板上串口通信和LED燈的驅(qū)動(dòng)程序。對(duì)于GD32芯片上其它功能接口的驅(qū)動(dòng)程序,都可根據(jù)需求而參考此種方法進(jìn)行改寫。
以實(shí)現(xiàn)串口通信功能的驅(qū)動(dòng)程序改寫為例,應(yīng)用程序通過(guò)I/O設(shè)備模塊中的標(biāo)準(zhǔn)接口函數(shù)和設(shè)備驅(qū)動(dòng)程序中的函數(shù)二者之間映射關(guān)系實(shí)現(xiàn)對(duì)底層I/O設(shè)備控制,如圖5所示。其中標(biāo)準(zhǔn)接口函數(shù)不需修改,由RT_DeviceDrivers分組中的serial.c文件實(shí)現(xiàn);而串口驅(qū)動(dòng)程序則由GD32_BSP分組中的colibri_board_usart.c文件實(shí)現(xiàn),需要對(duì)相應(yīng)的功能函數(shù)和配置進(jìn)行修改。改寫的內(nèi)容主要包括替換片上外設(shè)訪問(wèn)層頭文件、實(shí)現(xiàn)串口通信功能的芯片管腳定義、rt_hw_usart_init()函數(shù)中的串口參數(shù)設(shè)置和通過(guò)rt_hw_serial_register()函數(shù)將串口設(shè)備注冊(cè)到RT-Thread設(shè)備驅(qū)動(dòng)框架中,即實(shí)現(xiàn)標(biāo)準(zhǔn)接口函數(shù)與串口設(shè)備之間的關(guān)聯(lián)。需要注意的是GD32與STM32兩種芯片在各自外設(shè)固件庫(kù)中提供的結(jié)構(gòu)體定義和函數(shù)功能是類似的但是名稱不一致,需要在移植過(guò)程中進(jìn)行修改,表1列出了串口驅(qū)動(dòng)程序colibri_board_usart.c文件中需要修改的結(jié)構(gòu)體和函數(shù)名稱。得益于Cortex內(nèi)核遵循的CMSIS接口標(biāo)準(zhǔn)和RT-Thread所采用的設(shè)備驅(qū)動(dòng)框架機(jī)制,對(duì)設(shè)備驅(qū)動(dòng)程序只需做上述少量改寫即可完成不同芯片間的移植工作。
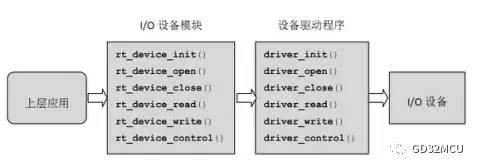
圖5 應(yīng)用程序操作底層設(shè)備的接口函數(shù)映射
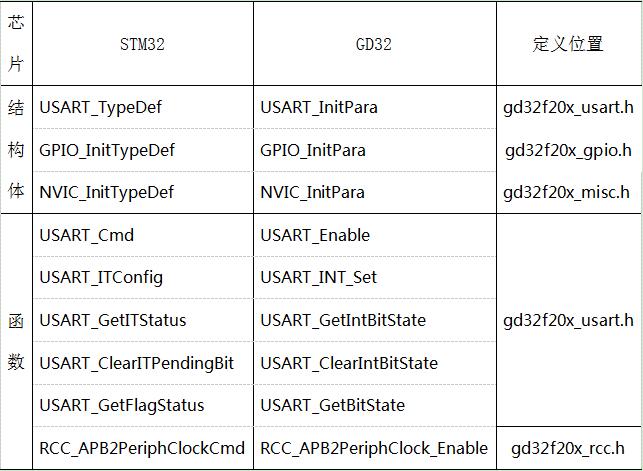
表1 串口驅(qū)動(dòng)程序中需要修改的結(jié)構(gòu)體和函數(shù)名稱
2.3 RT-Thread測(cè)試應(yīng)用程序編寫
開發(fā)板在上電后GD32芯片復(fù)位,通過(guò)文件startup_gd32f20x_cl.s中復(fù)位地址處的加載指令調(diào)用RT-Thread系統(tǒng)main()函數(shù)(位于startup.c文件中),在完成開發(fā)板、RT-Thread系統(tǒng)內(nèi)核、定時(shí)器、用戶任務(wù)和空閑任務(wù)等的初始化后,通過(guò)rt_system_scheduler_start()函數(shù)啟動(dòng)RT-Thread調(diào)度器實(shí)現(xiàn)對(duì)各個(gè)用戶任務(wù)的實(shí)時(shí)調(diào)度。為驗(yàn)證RT-Thread在Colibri-F207ZE開發(fā)板上的移植是否成功,使用rt_thread_init()函數(shù)建立兩個(gè)用戶任務(wù)分別控制兩個(gè)LED燈按照0.5秒和1秒的周期閃爍。
03
嵌入式實(shí)時(shí)控制系統(tǒng)的測(cè)試
在完成RT-Thread在Colibri-F207ZE開發(fā)板上的移植和測(cè)試程序編寫后,將經(jīng)過(guò)MDK編譯得到的axf文件下載到開發(fā)板上運(yùn)行。通過(guò)上位機(jī)的串口通信工具可以和RT-Thread提供的Shell進(jìn)行交互操作,并使用相應(yīng)指令觀察RT-Thread系統(tǒng)運(yùn)行和RAM的使用情況,如圖6所示。可以看到共有4個(gè)任務(wù)在運(yùn)行,其中LED_GREE和LED_RED是控制LED燈閃爍的用戶任務(wù),tshell和tidle分別是系統(tǒng)的shell交互任務(wù)和空閑任務(wù);在RT-Thread中注冊(cè)有一個(gè)設(shè)備,就是提供Shell功能的uart1串口。通過(guò)該測(cè)試程序,表明RT-Thread已經(jīng)在Colibri-F207ZE開發(fā)板上穩(wěn)定運(yùn)行,實(shí)現(xiàn)了預(yù)期的移植效果。
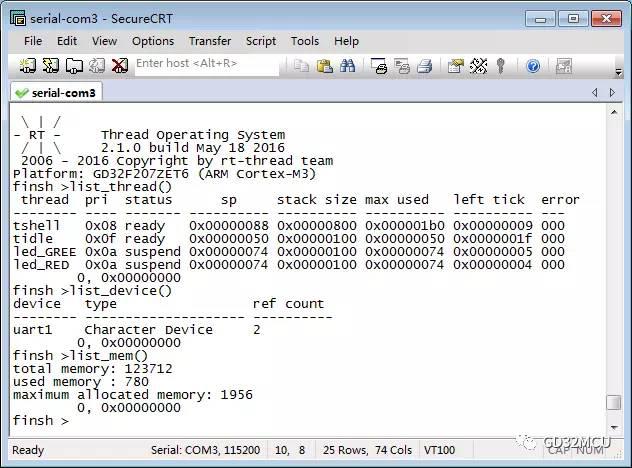
圖6 RT-Thread系統(tǒng)Shell交互界面
結(jié) 語(yǔ)
本文基于GD32微控制器和RT-Thread實(shí)時(shí)操作系統(tǒng)構(gòu)建了一種嵌入式實(shí)時(shí)控制系統(tǒng),其具有軟硬件自主可控、安全可靠的特點(diǎn)為工業(yè)生產(chǎn)、國(guó)防裝備等軍民應(yīng)用的關(guān)鍵領(lǐng)域提供了有效解決方案。通過(guò)本文的研究和探索,在自主可控嵌入式實(shí)時(shí)控制系統(tǒng)的構(gòu)建方面積累了技術(shù)檢驗(yàn),為后期配套應(yīng)用開發(fā)奠定了堅(jiān)實(shí)基礎(chǔ)。
作者簡(jiǎn)介
呂華溢(工程師),主要從事力學(xué)傳感器設(shè)計(jì)、智能化儀器及測(cè)控系統(tǒng)的研究工作;謝政(碩士研究生),研究方向?yàn)閮x表測(cè)控系統(tǒng)設(shè)計(jì)、嵌入式系統(tǒng)開發(fā)。
如果想加入RT-Thread Nano交流群,與RT-Thread官方團(tuán)隊(duì)直接交流,請(qǐng)?zhí)砑游⑿?3924608367,注明rt-thread,直接拉進(jìn)群。
即刻關(guān)注“GD32MCU”微信公眾號(hào)并訪問(wèn)www.GD32MCU.com網(wǎng)站,探索更多GD32 MCU產(chǎn)品信息及解決方案,快來(lái)參與論壇互動(dòng)吧!
-
嵌入式系統(tǒng)
+關(guān)注
關(guān)注
41文章
3648瀏覽量
130118 -
兆易創(chuàng)新科技
+關(guān)注
關(guān)注
1文章
14瀏覽量
2996
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何去實(shí)現(xiàn)嵌入式網(wǎng)絡(luò)智能控制系統(tǒng)的設(shè)計(jì)?
實(shí)時(shí)嵌入式系統(tǒng)的特性是什么
GD32 MCU學(xué)習(xí)這本書的理由
基于LINUX和CAN總線的工業(yè)嵌入式控制系統(tǒng)研究
基于嵌入式實(shí)時(shí)操作系統(tǒng)的現(xiàn)場(chǎng)控制系統(tǒng)
嵌入式網(wǎng)絡(luò)智能控制系統(tǒng)的研究
DSP嵌入式系統(tǒng)人機(jī)接口設(shè)計(jì)

基于嵌入式操作系統(tǒng)的控制系統(tǒng)平臺(tái)設(shè)計(jì)

嵌入式Linux智能家居控制系統(tǒng)設(shè)計(jì)

基于ARM嵌入式技術(shù)的牙椅控制系統(tǒng)


關(guān)于GD32構(gòu)建軟硬件自主可控的嵌入式實(shí)時(shí)控制系統(tǒng)的介紹和應(yīng)用

基于FreeRTOS的嵌入式云臺(tái)控制系統(tǒng)設(shè)計(jì)

基于嵌入式機(jī)器視覺(jué)控制系統(tǒng)的研究
嵌入式控制系統(tǒng)概述





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論