Linux開發
編譯類型說明(重要)
-
MBR固件是采用舊版本SDK編譯出來的MBR分區固件,已使用時間長,穩定性高
-
GPT固件是采用新版本SDK編譯出來得GPT分區固件,兼容性好,SDK編譯簡單方便,功能齊全,建議使用。
注意:官方正在完善新版本SDK(GPT),在后期將全部使用新版本SDK。
創建 Ubuntu 根文件系統
準備工作
安裝qemu
在Linux PC主機上安裝模擬器:
sudoapt-getinstallqemu-user-stat
ic
下載和解壓 ubuntu-core
Firefly-rk3399 ubuntu根文件系統是基于Ubuntu base 16.04來創建的。用戶可以到ubuntu cdimg 下載,選擇下載ubuntu-base-16.04.1-base-arm64.tar.gz 。
下載完之后,創建臨時文件夾并解壓根文件系統:
mkdir
tempsudotar-xpfubuntu-base-16.04.1-base-arm64.tar.gz-Ctemp
修改根文件系統
準備工作
準備網絡:
sudocp-b/etc/resolv.conftemp/etc/resolv.conf
準備qemu
sudocp/usr/bin/qemu-aarch64-statictemp/usr/bin/
進入根文件系統進行操作:
更新及安裝
更新:
安裝自己需要的功能
aptinstallvimgit....(根據自己需求添加)
安裝xubuntu
aptinstallxubuntu-desktop
可能出現錯誤:
E:Unabletolocatepackagexxxx
安裝包的源沒有添加到/etc/apt/source.list中,導致無法識別安裝包,可以自行添加源,也可以使用下面給出的source.list覆蓋原來的/etc/apt/source.list文件:
# See http://help.ubuntu.com/community/Upgr
adeNotes f
or how to upgrade to# newer versions of the distribu
tion.debhttp://ports.ubuntu.com/ubuntu-ports/xenialm
ainrestricteddeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenialmainrestricted## Major bug fix updates produced after the final release of the## distribution.debhttp://ports.ubuntu.com/ubuntu-ports/xenial-updatesmainrestricteddeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-updatesmainrestricted## Uncomment the following two lines to add software from the 'universe'## repository.## N.B. software from this repository is ENTIRELY UNSUPPORTED by the Ubuntu## team. Also, please note that software in universe WILL NOT receive any## review or updates from the Ubuntu security team.debhttp://ports.ubuntu.com/ubuntu-ports/xenialuniversedeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenialuniversedebhttp://ports.ubuntu.com/ubuntu-ports/xenial-updatesuniversedeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-updatesuniverse## N.B. software from this repository may not have been tested as## extensively as that contained in the main release, although it includes## newer versions of some applications which may provide useful features.## Also, please note that software in b
ackports WILL NOT receive any review## or updates from the Ubuntu security team.debhttp://ports.ubuntu.com/ubuntu-ports/xenial-backportsmainrestricteddeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-backportsmainrestricteddebhttp://ports.ubuntu.com/ubuntu-ports/xenial-securitymainrestricteddeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-securitymainrestricteddebhttp://ports.ubuntu.com/ubuntu-ports/xenial-securityuniversedeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-securityuniversedebhttp://ports.ubuntu.com/ubuntu-ports/xenial-securitymultiversedeb-srchttp://ports.ubuntu.com/ubuntu-ports/xenial-securitymultiverse
添加用戶及設置密碼
添加用戶
useradd-s'/bin/bash'-m-Gadm,sudofirefly
給用戶設置密碼:
給root用戶設置密碼:
修改完自己的根文件系統就可以退出了。
制作根文件系統
制作自己的根文件系統,大小依據自己的根文件系統而定,注意依據temp文件夾的大小來修改count值
ddif=/dev/zeroof=linuxroot.imgbs=1Mcount=2048sudomkfs.ext4linuxroot.imgmkdirrootfssudomountlinuxroot.imgrootfs/sudocp-
rfptemp/*rootfs/sudoumountrootfs/e2fsck-p-flinuxroot.imgresize2fs-Mlinuxroot.img
這樣 linuxroot.img 就是最終的根文件系統映像文件了。
FAQs
根文件系統加載后,大小不正常,未占滿整個分區:
在系統正確加載后執行擴展文件系統命令:
resize2fs/dev/mtd/by-name/linuxroot
編譯 Ubuntu 固件(GPT)
為了方便用戶的使用與開發,官方提供了Linux開發的整套sdk,本章詳細的說明SDK的具體用法。
準備工作
下載源碼
下載 Linux-SDK:
初始化repo倉庫:
mkdirlinux-sdkcdlinux-sdk../repo/repoinit--repo-urlhttps://github.com/FireflyTeam/repo.git-uhttps://github.com/FireflyTeam/manifests.git-blinux-sdk-mrk3399/rk3399_linux_release.xml
同步源碼:
因為國內用戶可能git拉代碼會比較慢,所以官方提供了基礎得源碼包Linux_SDK.7z
下載Linux_SDK.7z
1.把壓縮包放在上一步下載repo工具的目錄下7zxLinux_SDK.7z2.更新代碼reposync-c
Linux_SDK 目錄介紹
目錄:
├── linux_sdk │ ├── app │ ├── buildroot buildroot根文件系統的編譯目錄 │ ├── build.sh -> device/
rockchip/common/build.sh 全自動編譯腳本 │ ├── device 編譯相關配置文件 │ ├── distro debian根文件系統生成目錄 │ ├── docs 文檔 │ ├── envsetup.sh -> buildroot/build/envsetup.sh │ ├── external │ ├── kernel 內核 │ ├── Makefile -> buildroot/build/Makefile │ ├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh rockdev鏈接更新腳本 │ ├── prebuilts │ ├── rkbin │ ├── rkflash.sh -> device/rockchip/common/rkflash.sh 燒寫腳本 │ ├── rootfs debian根文件系統編譯目錄 │ ├── tools 燒寫、打包工具 │ └── u-boot u-boot
搭建SDK編譯環境
編譯buildroot固件:
sudoapt-getinstallrepogit-coregitkgit-guigcc-arm-linux-gnueabihfu-boot-toolsdevice-tree-com
piler\gcc-aarch64-linux-gnumtoolspartedlibudev-devlib
usb-1.0-0-dev
python-linaro-image-tools\linaro-image-toolsautoconfautotools-devlibsigsegv2m4intltoollibdrm-devcurlse
dmake\binutilsbuild-essentialgccg++bashpatchgzipbzip2perltarcpiopythonunzip
rsyncfilebcwget\libncurses5libqt4-devlibglib2.0-devlibgtk2.0-devlibglade2-devcvsgitmercurialrsyncopenssh-client\
subversio
nasciidocw3mdblatexgraphvizpython-matplotliblibc6:i386libssl-devtexinfo\liblz4-toolgenext2fslib32st
dc++6
編譯debian固件:
sudoapt-getinstallrepogit-coregitkgit-guigcc-arm-linux-gnueabihfu-boot-toolsdevice-tree-compiler\gcc-aarch64-linux-gnumtoolspartedlibudev-devlibusb-1.0-0-devpython-linaro-image-tools\linaro-image-toolsgcc-4.8-multilib-arm-linux-gnueabihfgcc-arm-linux-gnueabihflibssl-dev\gcc-aarch64-linux-gnug+confautotools-devlibsigsegv2m4intltoollibdrm-devcurlsedmake\binutilsbuild-essentialgccg++bashpatchgzipbzip2perltarcpiopythonunziprsyncfilebcwget\libncurses5libqt4-devlibglib2.0-devlibgtk2.0-devlibglade2-devcvsgitmercurialrsyncopenssh-client\subversionasciidocw3mdblatexgraphvizpython-matplotliblibc6:i386libssl-devtexinfo\liblz4-toolgenext2fslib32stdc++6
ubuntu固件:(根文件系統請使用官方提供的根文件系統鏡像)
sudoapt-getinstallrepogit-coregitkgit-guigcc-arm-linux-gnueabihfu-boot-toolsdevice-tree-compiler\gcc-aarch64-linux-gnumtoolspartedlibudev-devlibusb-1.0-0-devpython-linaro-image-tools\linaro-image-toolsgcc-4.8-multilib-arm-linux-gnueabihfgcc-arm-linux-gnueabihflibssl-dev\gcc-aarch64-linux-gnug+confautotools-devlibsigsegv2m4intltoollibdrm-devcurlsedmake\binutilsbuild-essentialgccg++bashpatchgzipbzip2perltarcpiopythonunziprsyncfilebcwget\libncurses5libqt4-devlibglib2.0-devlibgtk2.0-devlibglade2-devcvsgitmercurialrsyncopenssh-client\subversionasciidocw3mdblatexgraphvizpython-matplotliblibc6:i386libssl-devtexinfo\liblz4-toolgenext2fslib32stdc++6
編譯SDK
編譯前配置
配置文件 aio-3399-jd4.mk:
./build.shaio-3399-jd4.mk#文件路徑在`device/rockchip/rk3399/aio-3399-jd4.mk`
配置文件生效會連接到device/rockchip/.BoardConfig.mk,檢查該文件可以驗證是否配置成功。
注意:aio-3399-jd4.mk為編譯生成buildroot固件的配置文件.同時用戶也可以通過參考該配置生成新的配置文件來適配自己所需要的固件。
重要配置介紹:(如果需要diy固件,可能需要修改下列配置信息)
# Uboot defconfigexportRK_UBOOT_DEFCONFIG=firefly-rk3399編譯uboot配置文件# Kernel defconfigexportRK_KERNEL_DEFCONFIG=firefly_linux_defconfig編譯kernel配置文件# Kernel dtsexportRK_KERNEL_DTS=rk3399-firefly-aiojd4編譯kernel用到的dts# pa
rameter for GPT tableexportRK_PARAMETER=parameter-ubuntu.txt分區信息(十分重要)# packagefile for make update imageexportRK_PACKAGE_FILE=rk3399-ubuntu-package-file打包配置文件# rootfs image pathexportRK_ROOTFS_IMG=xxxx/xxxx.img根文件系統鏡像路徑
注意,十分重要!!
默認配置編譯buildroot固件,如果想編譯其他固件(如ubuntu固件)請執行一下操作:
#解壓tar-xvfrk3399_ubuntu18.04_LXDE.img.tgz#sdk根目錄下mkdirubunturootfsm
vrk3399_ubuntu18.04_LXDE.imgubunturootfs/#修改aio-3399-jd4.mk文件vimdevice/rockchip/rk3399/aio-3399-jd4.mk#把RK_ROOTFS_IMG屬性改成ubuntu文件系統鏡像得路徑(也就是rk3399_ubuntu18.04_LXDE.img)RK_ROOTFS_IMG=ubunturootfs/rk3399_ubuntu18.04_LXDE.img
注意:ubuntu根文件系統鏡像存放路徑不能錯
全自動編譯
在配置和搭建環境的工作都做好的前提下:
全自動編譯的固件默認編譯buildroot固件。生成固件目錄rockdev/,同時會在IMAGE中備份。
部分編譯
recovery
recovery分區可省略,若有需要: 編譯recovery:
rootfs
cdrootfs/1:#Building base debian system by ubuntu-build-service from linarosudoapt-getinstallbinfmt-supportqemu-user-stat
iclive-buildsudodpkg-iubuntu-build-service/packages/*sudoapt-getinstall-f2:#編譯 32 位的 debian:RELEASE=stretchTARGET=desktopARCH=armhf./mk-base-debian.sh#或編譯 64 位的 debian:RELEASE=stretchTARGET=desktopARCH=arm64./mk-base-debian.sh#上面編譯如果遇到如下問題情況:noexecornodevissue/usr/share/debootstrap/functions:line1450:..../rootfs/ubuntu-build-service/stretch-desktop-armhf/chroot/test-dev-null:PermissiondeniedE:
Cannotinstallintotarget'/home/foxluo/work3/rockchip/rk_linux/rk3399_linux/rootfs/ubuntu-build-service/stretch-desktop-armhf/chroot' mounted with noexec or nodev# 解決辦法:mount-oremount,exec,devxxx(xxxisthemountplace),thenrebuildit.3:# 編譯 32 位的 debian:VERSION=debugARCH=armhf./mk-rootfs-stretch.sh# 開發階段推薦使用后面帶 debug# 編譯 64 位的 debian:VERSION=debugARCH=arm64./mk-rootfs-stretch-arm64.sh4:./mk-image.shmvlinaro-rootfs.img../distro/5:#修改aio-3399-jd4.mk文件vimdevice/rockchip/rk3399/aio-3399-jd4.mk#把RK_ROOTFS_IMG屬性改成ubuntu文件系統鏡像得路徑(也就是linaro-rootfs.img)RK_ROOTFS_IMG=distro/linaro-rootfs.img
下載鏈接https://pan.baidu.com/s/1DuCzTGARDi7APxyKs9Nl1A#list/path=%2F
把得到的鏡像放到sdk的根目錄處:
#解壓tar-xvfrk3399_ubuntu18.04_LXDE.img.tgz#sdk根目錄下mkdirubunturootfsmvrk3399_ubuntu18.04_LXDE.imgubunturootfs/#修改aio-3399-jd4.mk文件vimdevice/rockchip/rk3399/aio-3399-jd4.mk#把RK_ROOTFS_IMG屬性改成ubuntu文件系統鏡像得路徑(也就是rk3399_ubuntu18.04_LXDE.img)RK_ROOTFS_IMG=ubunturootfs/rk3399_ubuntu18.04_LXDE.img
注意:ubuntu根文件系統鏡像存放路徑不能錯
運行./mkfirmware.sh會自動更新rockdev/rootfs.img的鏈接
固件打包
同步更新各部分鏡像
每次打包固件前先確保rockdev/目錄下文件鏈接是否正確:
ls -l ├── boot.img -> ~/project/linux_sdk/kernel/boot.img ├── idbloader.img -> ~/project/linux_sdk/u-boot/idbloader.img ├── linaro-rootfs.img ├── MiniLoaderAll.bin -> ~/project/linux_sdk/u-boot/rk3399_loader_v1.14.115.bin ├── misc.img -> ~/project/linux_sdk/device/rockchip/rockimg/wipe_all-misc.img ├── oem.img ├── parameter.txt -> ~/project/linux_sdk/device/rockchip/rk3399/parameter-ubuntu.txt ├── recovery.img -> ~/project/linux_sdk/buildroot/output/rockchip_rk3399_recovery/images/recovery.img ├── rootfs.img -> ~/project/linux_sdk/ubunturootfs/rk3399_ubuntu18.04_LXDE.img ├── trust.img -> ~/project/linux_sdk/u-boot/trust.img ├── uboot.img -> ~/project/linux_sdk/u-boot:/uboot.img └── userdata.img
可以運行./mkfirmware.sh更新鏈接
提示:若不是編譯全部的分區鏡像,在運行./mkfirmware時,會遇到如下類似情況:
error: /home/ljh/proj/linux-sdk/buildroot/output/rockchip_rk3399_recovery/images/recovery.img not found! 表示recovery分區沒有編譯出鏡像,其他的情況類似,如oem.img、userdata.img 上文提到,這些屬于可省略分區鏡像,可以不用理會。
打包統一固件
注意:打包前請確認tools/linux/Linux_Pack_Firmware/rockdev/package-file是否正確。打包會根據此文件進行分區打包。此文件鏈接會在./build.shaio-rk3399-jd4.mk命令時更新,如果配置不對請返回[配置]這一節重新配置一次。
整合統一固件
分區介紹
parameter
parameter.txt包含了固件的分區信息十分重要,你可以在device/rockchip/rk3399目錄下找到一些parameter.txt文件,下面以parameter-debian.txt為例子做介紹:
FIRMWARE_VER:8.1MACHINE_MODEL:RK3399MACHINE_ID:007MANUFACTURER:RK3399MAGIC:0x5041524BATAG:0x00200800MACHINE:3399CHECK_MASK:0x80PWR_HLD:0,0,A,0,1TYPE:GPTCMDLINE:mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(trust),0x00002000@0x00008000(misc),0x00010000@0x0000a000(boot),0x00010000@0x0001a000(recovery),0x00010000@0x0002a000(backup),0x00020000@0x0003a000(oem),0x00700000@0x0005a000(rootfs),-@0x0075a000(userdata:grow)uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE屬性是我們關注的地方。以uboot為例0x00002000@0x00004000(uboot)中0x00004000為uboot分區的起始位置0x00002000為分區的大小。后面的分區規則相同。用戶可以根據自己需要增減或者修改分區信息,但是請最少保留uboot,trust,boot,rootfs分區,這是機器能正常啟動的前提條件。parameter-ubuntu.txt中使用的就是這樣的最簡分區方案。
分區介紹:
uboot 分區: 燒寫 uboot 編譯出來的 uboot.img. trust 分區: 燒寫 uboot 編譯出來的 trust.img misc 分區: 燒寫 misc.img。開機
檢測進入recovery模式.(可省略) boot 分區: 燒寫 kernel 編譯出來的 boot.img.包含kernel和設備樹信息 recovery 分區: 燒寫 recovery.img.(可省略) backup 分區: 預留,暫時沒有用。后續跟
android 一樣作為 recovery 的 backup 使用.(可省略) oem 分區: 給廠家使用,存放廠家的 app 或數據。只讀。代替原來音箱的 data 分區。掛載在/oem 目錄.(可省略) rootfs 分區: 存放 buildroot 或者 debian 編出來的 rootfs.img,只讀. userdata 分 區 : 存 放 app 臨 時 生 成 的 文 件 或 者 是 給 最 終 用 戶 使 用 。 可 讀 寫 , 掛 載 在 /userdata 目錄下.(可省略)
package-file
此文件應當與parameter保持一致,用于固件打包。可以在tools/linux/Linux_Pack_Firmware/rockdev下找到相關文件。以rk3399-ubuntu-package-file為例介紹:
# NAME Relative path##HWDEF HWDEFpackage-filepackage-filebootloaderImage/MiniLoaderAll.binparameterImage/parameter.txttrustImage/trust.imgubootImage/uboot.imgbootImage/boot.imgrootfs:growImage/rootfs.imgbackupRESERVED
以上是SDK編譯后生成的鏡像文件。根據parameter.txt只打包自己用到的img文件。
Ubuntu 應用層支持
視頻硬件編解碼支持
Mpp是Rockchip為RK3399提供的一套視頻編解碼的api, 并且基于mpp,Rockchip提供了一套gstreamer的編解碼插件。用戶可以根據自己的需求,基于gstreamer來做視頻編解碼的應用,或者直接調用mpp,來實現硬件的編解碼加速。
Firefly 發布的Ubuntu 系統, 都已經提供了完整的gstremaer 和 mpp支持,并且提供了相應的demo,供用戶開發參考。
Gstreamer
/usr/local/bin/h264dec.sh 測試硬件H264解碼。
/usr/local/bin/h264enc.sh 測試硬件H264編碼。
用戶可以參照這兩個腳本,配置自己的gstreamer應用。
OpenGL-ES
RK3399 支持 OpenGL ES1.1/2.0/3.0/3.1。
Firefly 發布的Ubuntu 系統, 都已經提供了完整的OpenGL-ES支持。運行glmark2-es2可以測試openGL-ES支持。 如果要避免屏幕刷新率對測試結果的影響,可以在串口終端上使用以下命令測試。
# systemctl stop lightdm# export DISPLAY=:0# Xorg &# glmark2-es2 –off-screen
在Chromium瀏覽器中, 在地址欄輸入:chrome://gpu可以查看chromium下硬件加速的支持。
Note:
-
EGL 是用arm 平臺上OpenGL針對x window system的擴展,功能等效于x86下的glx庫。
-
由于Xorg使用的Driver modesettings 默認會加載libglx.so(禁用glx會導致某些通過檢測glx環境的應用啟動失敗), libglx.so會搜索系統中的dri實現庫。但是rk3399 Xorg 2D加速是直接基于DRM實現, 并未實現dri庫,所以啟動過程中,libglx.so會報告如下的錯誤 。
(EE)AIGLXerror:dlopenof/usr/lib/aarch64-linux-gnu/dri/rockchip_dri.sofai
led
這個對系統運行沒有任何影響,不需要處理。
-
基于同樣的道理,某些應用啟動過程中,也會報告如下錯誤,不用處理,對應用的運行不會造成影響。
libGLerror:unabletoloaddriver:rockchip_dri.solibGLerror:driverpointermissinglibGLerror:failedtoloaddriver:rockchip
-
Firefly之前發布的某些版本的Ubuntu軟件,默認關閉了加載libglx.so,在某些情況下,運行某些應用程序會出現下述錯誤:
GdkGLExt-WARNING**:Windowsystemdoesn'tsupportOpenGL.
修正的方法如下:
刪除/etc/X11/xorg.conf.d/20-modesetting.conf中一下三行配置。
Section"Module"Disable"glx"EndSection
OpenCL
Firefly發布的Ubuntu系統,已經添加了opencl1.2支持,可以運行系統內置的clinfo獲取平臺opencl相關參數。
firefly@firefly:~$ clinfo Platform #0 Name: ARM Platform Version: OpenCL 1.2 v1.r14p0-01rel0-git(966ed26).f44c85cb3d2ceb87e8be88e7592755c3 Device #0 Name: Mali-T860 Type: GPU Version: OpenCL 1.2 v1.r14p0-01rel0-git(966ed26).f44c85cb3d2ceb87e8be88e7592755c3 Global memory size: 1 GB 935 MB 460 kB Local memory size: 32 kB Max work group size: 256 Max work item sizes: (256, 256, 256) …
TensorFlow Lite
RK3399 支持神經網絡的GPU加速方案LinuxNN, Firefly發布的Ubuntu系統,已經添加了LinuxNN的支持。
在opt/tensorflowbin/下,運行test.sh, 即可測試MobileNet 模型圖像分類器的 Demo和MobileNet-SSD 模型的目標檢測 Demo
firefly@firefly:/opt/tensorflowbin$ ./test.sh Loaded model mobilenet_ssd.
tflite resolved reporter nn version: 1.0.0 findAvailableDevices filename:libarmnn-driver.so d_info:40432 d_reclen:40s [D][ArmnnDriver]: Register Service: armnn (version: 1.0.0)! first invoked time: 1919.17 ms invoked average time: 108.4 ms validCount: 26 car @ (546, 501) (661, 586) car @ (1, 549) (51, 618) person @ (56, 501) (239, 854) person @ (332, 530) (368, 627) person @ (391, 541) (434, 652) person @ (418, 477) (538, 767) person @ (456, 487) (602, 764) car @ (589, 523) (858, 687) person @ (826, 463) (1034, 873) bicycle @ (698, 644) (1128, 925) write out.jpg succ!
屏幕旋轉
Firefly發布的Ubuntu系統,如果需要默認對系統的顯示方向做旋轉,可以在
/etc/default/xrandr中修改對應的顯示設備的方向即可。
firefly@firefly:~$ cat /etc/default/xrandr#!/bin/sh# Rotation can be one of 'normal', 'left', 'right' or 'inverted'.# xrandr --output
HDMI-1 --rotate normal# xrandr --output LVDS-1 --rotate normal# xrandr --output EDP-1 --rotate normal# xrandr --output MIPI-1 --rotate normal# xrandr --output VGA-1 --rotate normal# xrandr --output DP-1 --rotate normal
對于配有觸摸屏的平臺,如果需要對觸摸屏的方向做旋轉,可以在/etc/X11/xorg.conf.d/05-gslX680.conf中修改SwapAxes / InvertX / InvertY三個值。
firefly@firefly:~$ cat /etc/X11/xorg.conf.d/05-gslX680.conf Section"InputClass"Identifier"gslX680"MatchIsTouchscreen"on"MatchProduct"gslX680"Driver"evdev"Option"SwapAxes""off"# Invert the respective axis.Option"InvertX""off"Option"InvertY""off"EndSection
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
相關推薦
AIO-3399PRO-JD4 有靈活的啟動方式。一般情況下,除非硬件損壞,AIO-3399PRO-JD4 開發板是不會變磚的。
如果在升級過程中出現意外,bootloader 損壞,導致無法重新升級,此時仍可以進入 Ma
![的頭像]() 發表于
發表于 12-17 16:32
?2267次閱讀
Core-3399PRO-JD4核心板采用Rockchip高性能六核64位處理器RK3399Pro,處理器內置AI神經網絡處理器NPU,高算力,超高效能,擁有強大的硬解碼能力與豐富的擴展接口,可靈活應用到集群服務器、計算機視覺、商顯一體設備等行業中。
![的頭像]() 發表于
發表于 12-17 16:51
?1922次閱讀
FAQs
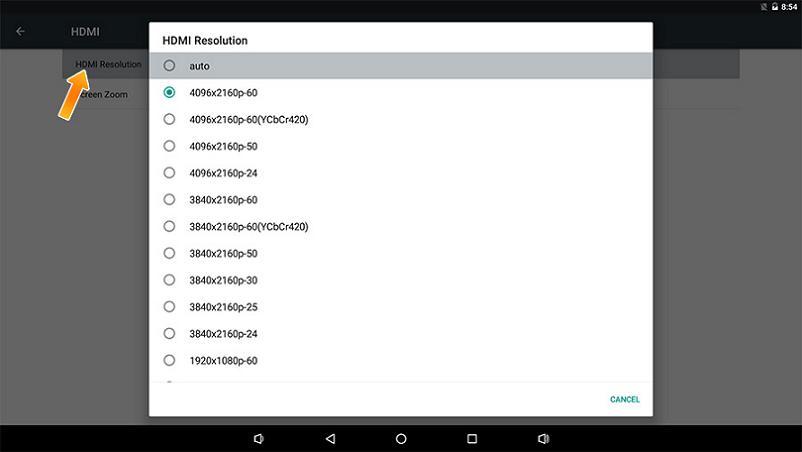
HDMI無法4K顯示?
AIO-3399JD4默認出廠固件是支持HDMI顯示,HDMI分辨率最高4K。如果HDMI無法支持4K分辨率可以重新燒寫默認固件,或者重新編譯內核
![的頭像]() 發表于
發表于 12-17 16:40
?1398次閱讀
RK U-Boot 基于開源的 U-Boot 進行開發,工作模式有啟動加載模式和下載模式。
![的頭像]() 發表于
發表于 12-17 16:41
?978次閱讀
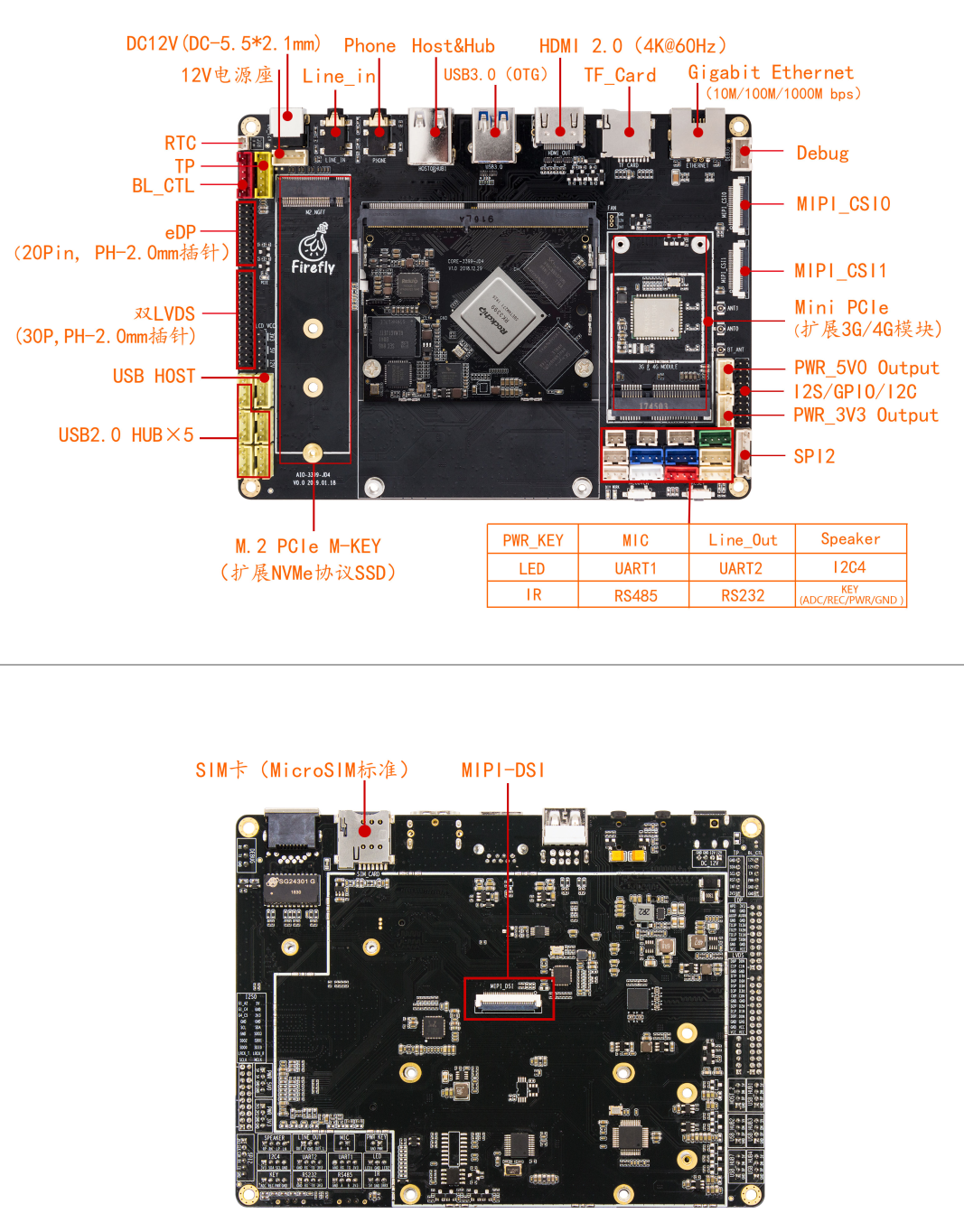
AIO-3399JD4 提供了豐富的接口,主要包括:電源接口, 1 x USB3.0(host/device),8 x USB2.0(接口×6,座子×2),HDMI,以太網,LVDS屏幕接口,eDP
![的頭像]() 發表于
發表于 12-18 14:21
?1930次閱讀
firefly
![的頭像]() 發表于
發表于 12-17 16:47
?1258次閱讀
AIO-3399JD4 開發板上的 AD 接口有兩種
![的頭像]() 發表于
發表于 12-17 16:49
?3513次閱讀
db,全稱 Android Debug Bridge,是 Android 的命令行調試工具,可以完成多種功能,如跟蹤系統日志,上傳下載文件,安裝應用等。
![的頭像]() 發表于
發表于 12-17 16:55
?1.2w次閱讀
AIO-3399JD4 有靈活的啟動方式。
![的頭像]() 發表于
發表于 12-17 17:01
?1745次閱讀
Core-3399-JD4核心板采用Rockchip高性能六核64位處理器RK3399,板載AI神經網絡處理器NPU SPR2801S,
![的頭像]() 發表于
發表于 12-18 14:11
?1708次閱讀
電子發燒友網站提供《Core 3399Pro JD4 Linux SDK源碼包(僅支持RK3399Pro).txt》資料免費下載
發表于 09-02 10:59
?1次下載

電子發燒友網站提供《Core 3399 JD4解合包工具(Linux).txt》資料免費下載
發表于 09-02 10:08
?0次下載
電子發燒友網站提供《Core 3399 JD4文檔AIO 3399JD4 Product Specifications.pdf》資料免費下載
發表于 09-02 09:40
?2次下載
電子發燒友網站提供《Core 3399 JD4 V2工具Linux Upgrade Tool 1.34.zip》資料免費下載
發表于 09-16 10:11
?0次下載
電子發燒友網站提供《Core 3399 JD4 V2 Linux SDK源碼包(僅支持RK3399).txt》資料免費下載
發表于 09-16 10:06
?0次下載
 fireflyCORE-3399主板JD4--Linux開發簡介
fireflyCORE-3399主板JD4--Linux開發簡介





 工商網監
工商網監
評論