 dfrobot路虎5履帶底盤簡介
dfrobot路虎5履帶底盤簡介


產品簡介
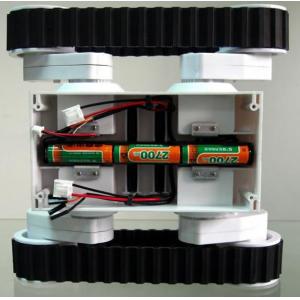
真正的“路虎”--可升降地盤+強勁動力履帶2WD小車地盤。不管運行的路面有多么崎嶇,不管坡度有多么的高,路虎小車都可以輕松搞定。眼見為實,大家可以參考以下視屏:
路虎5底盤扭力大、低噪聲、控制簡易、運動靈活、機動性能強勁的機器人底盤。底盤采用帶電感的大扭力電機,經過斜齒輪與減速齒組變速后,讓機器人擁有充足動力快速越障,電機和減速齒輪內置于底盤外部的支撐柱內,通過改變支撐柱和底盤的角度,就可以改變底盤的高度。
底盤穩定性強,橡膠履帶富有彈性、減震耐磨性好、抓地摩擦力大,非常適合Arduino愛好者、各大中小學開展機器人普及教育使用,更適合學生用其開發參加全國大學生電子大賽。
還在用51單片機控制小車嗎?你已經OUT了!!DFRobot為機器人愛好者推薦更多簡單易用的Arduino的智能控制設備。Arduino是目前國際上非常流行的開源控制器,大量擴展設備和開源樣例代碼,大大降低了搭建智能小車的難度。以下是一些常用配件,如果你更多需求,請進入論壇或者致電咨詢。
- DFRobot Romeo多合一控制器:集成了Arduino Leonardo控制器、傳感器擴展板和2A雙路電機驅動,使小車控制一步到位。
- APC220無線數傳模塊:遙控小車的利器,有效距離可達1公里
- 2300MAH鎳氫電池:重量輕,電力足,為小車提供持久續航
- 數字紅外開關和紅外開關支架:簡單可靠,小車避障必備
- 輸入搖桿擴展板和DFRduino UNO V3.0(Arduino兼容)板:搭配APC220構成無線遙控手柄
- 充電器套裝 (包括一個充電器,一個9V可充電電池,送優質9V電池扣)
- 尺 寸:245x225x74mm(長x寬x高)
- 高度范圍:74mm-100mm之間調節
- 離地高度:21mm-50mm
- 電機供電電壓:6-12V
- 最大速度:42cm/s(12V)
- 電機最大扭矩:10kg*cm
- 電機減速比:86.8 :1
- 爬坡能力:> 30度
- 有效載重:> 7.5Kg
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6085瀏覽量
35296 -
DFRobot
+關注
關注
4文章
1157瀏覽量
9513
發布評論請先 登錄
相關推薦
斜三角履帶底盤的制作
1.運動功能說明 ? ? ? ?斜三角履帶底盤可以通過兩側履帶的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能。另外,傾斜的履帶也可以使其具有良好的越障效果。 前進與后退

履帶機器人 金屬底盤
` 本帖最后由 威凱-智控 于 2012-8-14 23:28 編輯
今天給大家分享一個全金屬的履帶機器人底盤準備最履帶機器人的朋友們,可以一起交流一下機器人瘋狂愛好者 讓思維沸騰起來 讓智慧行動起來 共同創造機器人的精彩!
發表于 08-14 23:25
履帶底盤的結構部分
寫在前面:看著網上那些履帶底盤,怎么看怎么不舒服,還是決定自己做。這樣就帶來一個很大的問題,就是很多結構件都要用3D打印。我自己有3D打印機,下面不但會給出設計,還會給出實物照片。但是,對于沒有3D
發表于 02-19 03:54
深度解析路虎全新發現底盤
路虎最近車型更新換代動作頻繁,甚至彪悍硬派的發現系列也重新改頭換臉大改款。全新一代發現在海外發布后,沒過多久便進入了中國市場,引入速度非常迅猛。全新一代發現外形不再方正,變得更加圓潤,車頭更有家族式
【底盤大PK】路虎發現神行/凱迪拉克XT5
這一期的底盤解析,我們要來看看兩款豪華SUV——路虎發現神行和凱迪拉克XT5,二者都是國產車型,價格范圍都是在35-50萬附近,配置空間表現都不差,而兩個品牌也是二線豪華軍團中的佼佼者


dfrobotDevastator履帶機器人移動平臺簡介
Devastator Tank Mobile Platform 履帶機器人是DFRobot 研制的機器人實驗平臺,該平臺不但可以使用當前流行的Arduino控制器,也可以使用Raspberry pi等其他控制器控制。

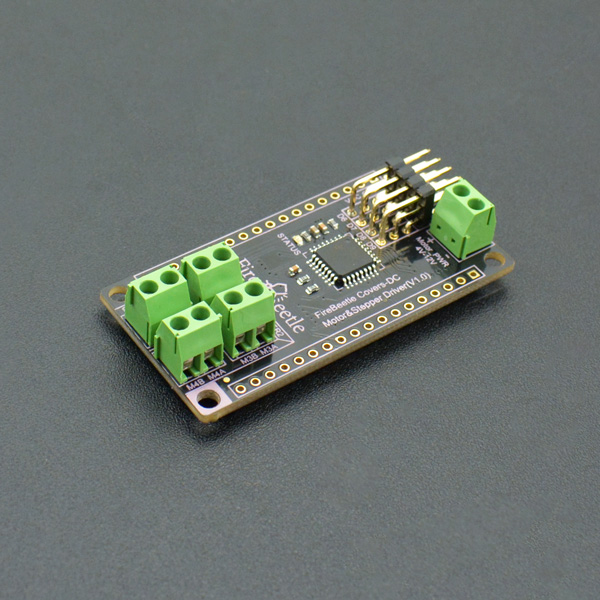
dfrobot四路電機驅動板簡介
DFRobot FireBeetle螢火蟲系列是專為物聯網設計的低功耗開發組件。此款FireBeetle Covers-DC Motor&Stepper Driver模塊,是針對FireBeetle
藍牙遙控履帶底盤行駛
1. 功能描述 本文提供的示例所實現的功能為:用手機APP遙控斜三角履帶底盤樣機實現移動,包括前進、停止、后退、原地左轉、原地右轉。 ? 2. 電子硬件 在這個示例中,采用了以下硬件,請大家

小型雙節履帶底盤的制作
1.運動功能說明 雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的抬起和落下。通過底盤運動與小臂運行的結合,實現上臺階、通過

正三角履帶底盤的制作分享
1.運動功能說明 正三角履帶底盤可以通過兩側履帶的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能。同時,由于車身的正三角特性,它不懼怕前后方向上的翻車。 ? ? 2.結構說明 該樣機由

小型三節履帶底盤的制作
雙節履帶車可以通過兩個驅動輪的差速運動來實現前進、后退、原地轉向、大半徑轉向等基本行駛功能,并可通過舵機關節模塊進行小臂的抬起和落下。通過底盤運動與小臂運行的結合,實現上臺階、通過坑洼地面等功能。





 工商網監
工商網監
評論