") 基于CANopen協(xié)議的智能液位遙測(cè)系統(tǒng)設(shè)計(jì)
基于CANopen協(xié)議的智能液位遙測(cè)系統(tǒng)設(shè)計(jì)
針對(duì)目前海事應(yīng)用中液位遙測(cè)系統(tǒng)的現(xiàn)狀,基于ARM9芯片的WinCE嵌入式開(kāi)發(fā)平臺(tái),開(kāi)發(fā)一套智能的液位遙測(cè)系統(tǒng)。
該系統(tǒng)采用CAN總線,遵循CANopen協(xié)議,在EVC開(kāi)發(fā)環(huán)境下結(jié)合多線程技術(shù)和數(shù)據(jù)庫(kù)技術(shù)實(shí)現(xiàn)遙測(cè)系統(tǒng)的通信和界面顯示功能。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)穩(wěn)定、實(shí)時(shí)、生動(dòng)地實(shí)現(xiàn)了通信、顯示、存儲(chǔ)、打印等功能,具有很高的應(yīng)用價(jià)值。
引言
液位遙測(cè)系統(tǒng)是油輪和化學(xué)品船的核心部分[1],直接關(guān)系到船舶在海上航行的安全性和可靠性。目前國(guó)內(nèi)該行業(yè)還處于低技術(shù)的惡性競(jìng)爭(zhēng),要改變這種狀況,只有通過(guò)提升技術(shù)水平才能實(shí)現(xiàn)。本系統(tǒng)就是在此背景下進(jìn)行研究設(shè)計(jì)的。
該系統(tǒng)是以ARM9為內(nèi)核,在WinCE操作系統(tǒng)平臺(tái)下,以CAN通信為基礎(chǔ),CANopen協(xié)議為規(guī)范,綜合應(yīng)用EVC編程、CAN通信、數(shù)據(jù)庫(kù)、多線程等技術(shù)設(shè)計(jì)的一個(gè)智能液位遙測(cè)系統(tǒng)。
ARM9的工作頻率最高為200 MHz,微處理器內(nèi)置彩色圖像處理電路,因此可以直接外接TFTLCD/VGA顯示屏。
CAN(Controller Area Network)總線是一種多主從結(jié)構(gòu),具有報(bào)文仲裁,錯(cuò)誤自檢測(cè)、處理機(jī)制,較強(qiáng)的通信能力,較強(qiáng)的短路保護(hù)能力,通信方式靈活多樣等優(yōu)點(diǎn)。船舶液位遙測(cè)系統(tǒng)是一個(gè)局域網(wǎng)控制系統(tǒng),選用CAN總線更能滿足其傳輸?shù)母呖煽啃裕?]。
1 CANopen協(xié)議
CANopen最初由從事工業(yè)控制的CiA會(huì)員開(kāi)發(fā),由于CANopen是一種公共、開(kāi)放、通用的協(xié)議,而且精練透明、容易開(kāi)發(fā),如今已經(jīng)被接受為CAN高層協(xié)議的標(biāo)準(zhǔn)之一。
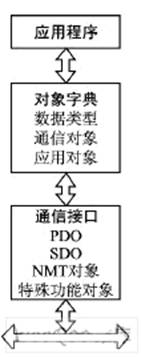
圖1 CANopen設(shè)備模塊
一個(gè)CANopen設(shè)備模塊可分為3部分,如圖1所示。通信接口和協(xié)議軟件用于提供在總線上收發(fā)通信對(duì)象的服務(wù);不同CANopen設(shè)備間的通信都是通過(guò)交換通信對(duì)象來(lái)完成的, 這一部分直接面向CAN控制器進(jìn)行操作。對(duì)象字典描述了設(shè)備使用的所有數(shù)據(jù)類型、通信對(duì)象和應(yīng)用對(duì)象;對(duì)象字典位于通信程序和應(yīng)用程序之間,用于向應(yīng)用程序提供接口。應(yīng)用程序?qū)?duì)象字典進(jìn)行操作,即可實(shí)現(xiàn)CANopen通信。它包括功能部分和通信部分,通信部分通過(guò)對(duì)對(duì)象字典進(jìn)行操作實(shí)現(xiàn)CANopen通信;而功能部分則根據(jù)應(yīng)用要求來(lái)實(shí)現(xiàn)。
在CANopen網(wǎng)絡(luò)系統(tǒng)中每個(gè)節(jié)點(diǎn)都有唯一的一個(gè)對(duì)象字典,而且每個(gè)節(jié)點(diǎn)的對(duì)象字典都具有相同的結(jié)構(gòu);但具體的內(nèi)容要根據(jù)不同的設(shè)備而定,包含了描述該設(shè)備及其網(wǎng)絡(luò)行為的所有參數(shù)。CANopen協(xié)議還定義了4種報(bào)文(通信對(duì)象),用于對(duì)不同作用的信息進(jìn)行處理,分別為管理報(bào)文(NMT)、服務(wù)數(shù)據(jù)對(duì)象(SDO)、過(guò)程數(shù)據(jù)對(duì)象(PDO)和預(yù)定義報(bào)文或特殊功能對(duì)象。
2 液位遙測(cè)系統(tǒng)總體結(jié)構(gòu)
液位遙測(cè)系統(tǒng)主要實(shí)現(xiàn)2項(xiàng)功能:
① 對(duì)各艙的液位、溫度、壓力等進(jìn)行實(shí)時(shí)監(jiān)測(cè);
② 當(dāng)監(jiān)測(cè)高于報(bào)警值時(shí)發(fā)出報(bào)警信號(hào)。
針對(duì)這2項(xiàng)功能,采用了CAN總線的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),系統(tǒng)總體結(jié)構(gòu)框圖如圖2所示。
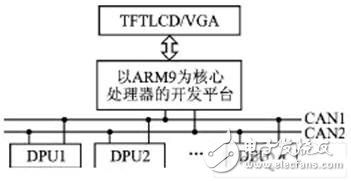
圖2 液位遙測(cè)系統(tǒng)總體結(jié)構(gòu)
由圖2可知,整個(gè)系統(tǒng)以CAN總線進(jìn)行通信,然而CAN芯片只提供了開(kāi)放系統(tǒng)互連參考模型(OSI)中的物理層和鏈路層功能,一般用戶必須直接用驅(qū)動(dòng)程序操作鏈路層。不能直接滿足控制網(wǎng)絡(luò)的組態(tài)和產(chǎn)品互連要求。為了以CAN芯片為基礎(chǔ)構(gòu)成完整的工業(yè)控制現(xiàn)場(chǎng)總線系統(tǒng),必須制定相應(yīng)的應(yīng)用層協(xié)議,實(shí)現(xiàn)系統(tǒng)的組態(tài)、設(shè)備互連和兼容功能。下面分別介紹各部分的功能。
2.1 分布式處理單元DPU
DPU是采用模塊化設(shè)計(jì)、具有通信功能的智能化遠(yuǎn)程I/O單元。DPU單元分布在船艙各處,作為傳感器和執(zhí)行器的接口,直接與傳感器和執(zhí)行器相連。各個(gè)DPU單元可以用兩根普通的雙芯屏蔽電纜( 或雙絞線等)連接到CAN總線上,將定時(shí)采集的各船艙液位高度、溫度等各種實(shí)時(shí)數(shù)據(jù)發(fā)送到總線上。
目前,基于CANopen的DPU的各種模塊(模擬量輸入/輸出、數(shù)字量輸入/輸出等)可以根據(jù)具體的監(jiān)測(cè)點(diǎn)連接到網(wǎng)絡(luò)中,完成液位、溫度、壓力等的監(jiān)測(cè)。
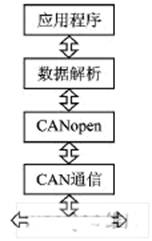
圖3 上位監(jiān)測(cè)點(diǎn)結(jié)構(gòu)圖
2.2 上位監(jiān)測(cè)點(diǎn)
在本系統(tǒng)中,上位監(jiān)測(cè)點(diǎn)主要實(shí)現(xiàn)通信和應(yīng)用兩個(gè)方面功能,具體結(jié)構(gòu)如圖3所示。
ARM9的開(kāi)發(fā)平臺(tái)已將CAN驅(qū)動(dòng)嵌入,根據(jù)CAN2.0協(xié)議,可以直接完成物理層和數(shù)據(jù)鏈路層的通信,因此,在WinCE操作系統(tǒng)下,實(shí)現(xiàn)CANopen通信,解析通信對(duì)象,調(diào)用應(yīng)用程序,完成整個(gè)上位系統(tǒng)的CANopen通信。
3 CANopen通信的實(shí)現(xiàn)
3.1 CAN通信
CAN通信通過(guò)調(diào)用底層封裝的接口函數(shù)實(shí)現(xiàn),主要包含:
開(kāi)端口CAN_StartChip;
關(guān)端口CAN_StartChip;
接收CAN數(shù)據(jù)CAN_GetNextReceivedFrame;;
發(fā)送CAN數(shù)據(jù)CAN_SendFrame。
具體通信流程如圖4所示。
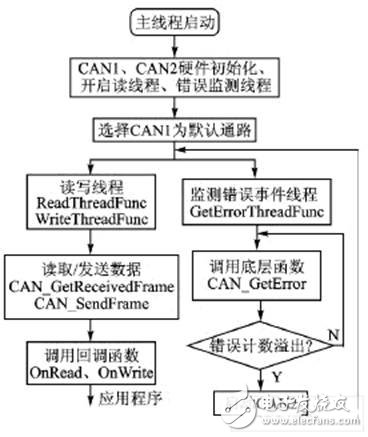
圖4 CAN通信流程
3.2 CANopen通信
CANopen協(xié)議是CAN通信應(yīng)用層的協(xié)議。通信標(biāo)準(zhǔn)定義了不同的通信對(duì)象,這些通信對(duì)象通過(guò)標(biāo)識(shí)符(COB_ID)來(lái)進(jìn)行區(qū)分。
網(wǎng)絡(luò)管理報(bào)文(NMT):提供網(wǎng)絡(luò)管理服務(wù),例如初始化、錯(cuò)誤控制和設(shè)備狀態(tài)控制。NMT對(duì)象映射到一個(gè)單一的帶2字節(jié)數(shù)據(jù)長(zhǎng)度的CAN幀,它的標(biāo)識(shí)符為0。在本系統(tǒng)中主要用于系統(tǒng)啟動(dòng)的初始化。
過(guò)程數(shù)據(jù)對(duì)象(PDO):過(guò)程數(shù)據(jù)對(duì)象用來(lái)傳遞實(shí)時(shí)數(shù)據(jù),數(shù)據(jù)傳輸被限制在1~8字節(jié),每個(gè)PDO有一個(gè)唯一的標(biāo)識(shí)符。標(biāo)識(shí)符具有優(yōu)先級(jí),遙測(cè)系統(tǒng)主要是對(duì)實(shí)時(shí)的液位等信息進(jìn)行顯示,大量的PDO數(shù)據(jù)進(jìn)行實(shí)時(shí)傳送。
服務(wù)數(shù)據(jù)對(duì)象(SDO):SDO的傳送是有證實(shí)的服務(wù),可靠性比較高,主要用于對(duì)系統(tǒng)中各節(jié)點(diǎn)的配置或信息的設(shè)置。
以上4種對(duì)象都有不同的優(yōu)先級(jí)。對(duì)于接收到的報(bào)文根據(jù)其COB_ID進(jìn)行解析,分送各不同的應(yīng)用變量,即可實(shí)現(xiàn)CANopen通信。
4 應(yīng)用模塊實(shí)現(xiàn)
4.1 系統(tǒng)配置
本系統(tǒng)中采用了配置文件的形式增強(qiáng)配置的靈活性,配置文件是根據(jù)下位DPU中各模塊、通道的現(xiàn)場(chǎng)分布匯總成的txt文件。首先,利用移動(dòng)磁盤或者Remote File Viewer在PC機(jī)上載入配置文件。其次是讀取工作,通過(guò)函數(shù)GetProfileString,根據(jù)不同的字段獲取需要的內(nèi)容。最后,對(duì)所獲得內(nèi)容賦給相應(yīng)的變量,并進(jìn)行顯示更新。
具體配置形式如圖5所示。由圖可知,可以對(duì)系統(tǒng)中模塊的使用、艙名、信號(hào)類型、單位、范圍、報(bào)警上下限、報(bào)警延時(shí)等進(jìn)行設(shè)置。因此,在集控室就可完成基本的配制,大大減輕了工作人員的負(fù)擔(dān)。
圖5 系統(tǒng)配置
4.2 實(shí)時(shí)顯示
為了實(shí)現(xiàn)實(shí)時(shí)、準(zhǔn)確、生動(dòng)地顯示系統(tǒng)運(yùn)行狀況,在該模塊中利用了文本加圖形的方式。因?yàn)閿?shù)據(jù)量較大,界面類型較多,切換頻繁,故主要采用了動(dòng)態(tài)創(chuàng)建控件的解決方法。
液位遙測(cè)系統(tǒng)主要完成各艙液位的實(shí)時(shí)顯示。此外,還包括貨艙的溫度、壓力,以及管路管道的壓力等重要信息。
4.3 數(shù)據(jù)存儲(chǔ)
在本系統(tǒng)中,數(shù)據(jù)存儲(chǔ)主要完成的是對(duì)報(bào)警數(shù)據(jù)的存儲(chǔ)和對(duì)艙容信息的監(jiān)測(cè),利用的是WinCE自帶數(shù)據(jù)庫(kù)系統(tǒng)。
系統(tǒng)存儲(chǔ)的主要是報(bào)警數(shù)據(jù),因此數(shù)據(jù)量比較小,采用自帶數(shù)據(jù)庫(kù)可以很方便地實(shí)現(xiàn)所需功能。此外,EVC4.0沒(méi)有提供訪問(wèn)外部數(shù)據(jù)庫(kù)ADOCE的接口。
4.4 實(shí)時(shí)打印
在本系統(tǒng)中實(shí)現(xiàn)了實(shí)時(shí)打印,即只要出現(xiàn)報(bào)警信息,立即將該信息進(jìn)行打印輸出;當(dāng)故障排除后,重新進(jìn)行打印,以便對(duì)數(shù)據(jù)進(jìn)行保存分析。
5 結(jié)論
本文所研究的是基于CANopen協(xié)議,在ARM9的WinCE嵌入式開(kāi)發(fā)平臺(tái)上的船舶液位遙測(cè)系統(tǒng)軟件。CANopen作為CAN總線的應(yīng)用層協(xié)議,在船舶遙測(cè)系統(tǒng)中有著廣闊的應(yīng)用前景。
系統(tǒng)中CAN總線的應(yīng)用大大提高了系統(tǒng)總體傳輸速率,雙CAN機(jī)制更加增強(qiáng)了整個(gè)系統(tǒng)的容錯(cuò)能力,保證了船舶運(yùn)行的安全性。整個(gè)軟件系統(tǒng)實(shí)現(xiàn)了CANopen通信,完成了數(shù)據(jù)顯示、存儲(chǔ)、打印、報(bào)警,并使配置更智能,實(shí)驗(yàn)證明了其運(yùn)行的可靠性。
-
CAN總線
+關(guān)注
關(guān)注
145文章
1946瀏覽量
130727 -
CANopen協(xié)議
+關(guān)注
關(guān)注
0文章
16瀏覽量
11308 -
液位遙測(cè)
+關(guān)注
關(guān)注
0文章
4瀏覽量
6080
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Profinet協(xié)議轉(zhuǎn)換為CanOpen協(xié)議來(lái)連接CanOpen伺服驅(qū)動(dòng)器的應(yīng)用
Canopen協(xié)議讀后感想
如何利用WinCE設(shè)計(jì)液位遙測(cè)系統(tǒng)軟件?
CAN總線在智能液位遙測(cè)系統(tǒng)有什么作用?
請(qǐng)問(wèn)怎樣去設(shè)計(jì)液位遙測(cè)系統(tǒng)軟件?
基于STM32的CANopen通訊協(xié)議的實(shí)現(xiàn)
CANopen協(xié)議
CANOpen協(xié)議簡(jiǎn)析
canopen協(xié)議與can特點(diǎn)
針對(duì)工業(yè)控制的Canopen系統(tǒng)Canopen system
遙控及液位遙測(cè)仿真系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)
采用WinCE的液位遙測(cè)系統(tǒng)軟件設(shè)計(jì)

浮式生產(chǎn)儲(chǔ)存卸油裝置液位遙測(cè)系統(tǒng)常用液位計(jì)有哪些
智能樓宇系統(tǒng)canopen協(xié)議與ModbusTCP協(xié)議進(jìn)行通訊
智能樓宇系統(tǒng)canopen協(xié)議與ModbusTCP協(xié)議進(jìn)行通訊






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論