 自行車里程速度表的電路原理及程序設計
自行車里程速度表的電路原理及程序設計
簡介:
現在,很多人都把騎自行車作為一項鍛煉身體的運動項目,如果在自行車上加裝一個里程速度表,就可以知道自己騎車的速度和行程,從而很好地控制運動量。本文介紹一種用單片機制作的自行車里程速度表。里程和速度顯示可進行切換,采用三位數碼管顯示,最大可顯示里程為99.9km。顯示最高速度可為99.9km/h。該里程速度表也可以用在電動自行車和速度不超過100km/h的摩托車上。
電路原理:
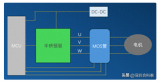
電路如圖l所示。由檢測傳感器、單片機電路和數碼顯示電路等組成。
檢測傳感器由永久磁鐵和開關型霍爾集成電路UGN3020.組成。
UGN3020由霍爾元件、放大器、整形電路及集電極開路輸出電路等組成。
其功能是把磁信號轉換成電信號。圖2a是其內部框圖。霍爾元件H為磁敏元件,當垂直于霍爾元件的磁場強度隨之變化時,其兩端的電壓就會發生變化,經放大和整形后,即可在③腳輸出脈沖電信號。其工作特性如圖2b所示。由于有一定的磁滯效應。可保證開關無抖動。Bop為工作點“開”的磁場強度,Brp為釋放點“關”的磁場強度。永久磁鐵固定在車輪的輻條上,UGN3020固定在車輪的叉架上。
檢測傳感器的工作原理如下:車輪每轉一周,磁鐵經過UGN3020一次,其③腳就輸出一個脈沖信號。UGN3020輸出的脈沖信號作為單片機AT89C2051的外中斷信號。從P3.2口輸入。單片機測量脈沖信號的個數和脈沖周期。根據脈沖信號的個數計算出里程,根據脈沖信號的周期計算出速度并送數碼管顯示。Sl用來進行里程和速度顯示的切換,在初始狀態下顯示的是速度。數碼管DSl~DS3、VTl~VT3、R4~R13等組成顯示電路。使用共陽數碼管。P3.3~P3.5為數碼管的動態掃描位驅動。P1.0~P1.6作數碼段碼輸出。
程序設計:
程序用C語言編寫,由主程序、外中斷O服務程序、11D中斷服務程序、延時子程序等模塊組成。主程序主要完成程序初始化和鍵盤處理。
外部中斷O服務程序由測量、計算、讀數等部分組成,TO中斷服務程序由計時、動態掃描顯示、自行車停車判斷等部分組成。
從P3.2口輸入的脈沖信號作為外中斷O的中斷請求信號。采用沿觸發方式。在測量速度時,由于車輪轉動脈沖信號的頻率很低,不適宜使用計數的方式進行測量,所以采用測脈沖周期的方法進行測量。用脈沖信號系統來控制計時信號,通過計時數計算出脈沖周期,用車輪的周長除以周期便可得到自行車的行駛速度。在測量里程時,用脈沖信號個數乘以車輪的周長便可獲得行駛里程。需要說明的是:脈沖信號周期和個數是同時測量的。要做的只是用按鈕開關Sl切換顯示。
定時器TD的中斷定時時間為5ms,每中斷一次計時變量n加l,因此n的單位為5ms。例如:自行車車輪轉一周對應的n值為100。則對應的時間為0.5s。由此可得自行車的速度為14.9km/h。如果n的值達到1000,即5秒鐘仍沒有發生外部中斷,即表示自行車沒有前進。n也被清零,速度顯示為O。讀數采用三位顯示,TD中斷一次顯示一位數。中斷3次就可以刷新一次數據。即15ms刷新一次數據。
責任編輯:wv
-
傳感器
+關注
關注
2550文章
51042瀏覽量
753105
發布評論請先 登錄
相關推薦
磁阻開關DT7901在自行車碼表中的應用
充電樁消防數據監管平臺在街道電動自行車棚的解決方案
XBLW/芯伯樂產品應用在電動自行車上的開發設計

戶外電動車充電樁智能消防控制箱:電動自行車安全的守護者
電動自行車充電樁用電安全消防系統平臺的重要性
電動自行車調速轉把原理分析
電動自行車電路降壓方案
基于NXP MCX系列MCU的電動自行車EBike儀表盤解決方案

2024電動自行車新國標修訂最新消息

新的電動自行車鋰電池安全技術規范有什么亮點

電動自行車電池質檢監控管理系統解決方案

預防電動自行車火災 需要哪幾步?
電動自行車如何改變我們的出行方式?探索電動自行車的綠色革命與安全升級!






 工商網監
工商網監
評論