 自動駕駛的摩爾定律:無人駕駛的最終實現時間或在2035年
自動駕駛的摩爾定律:無人駕駛的最終實現時間或在2035年
無人駕駛的真正落地時間的預測,近兩年從非常樂觀迅速轉向謹慎甚至悲觀。真正的無人駕駛到底還需要多久,無人駕駛初創公司 May Mobility 的 CEO Edwin Olson,針對這個問題,結合已有的數據做了一個推理。
他利用技術發展的指數性作為假設,試圖找到無人駕駛發展的摩爾定律,進而推導出實現無人駕駛的大概時間表。他得出的時間,可能比多數人預測的要長,尤其是國內的自動駕駛創業公司。
以下是全文編譯。
作為一家無人車公司的 CEO,我總是在問一個問題,那就是究竟還要多久自動駕駛的士才能在任何時候載人去任何地方。我們已經聽到了推銷的(「X公司將會在 2019 年解決自動駕駛的士問題!」)和工程師(「呃,這很難」)的各種版本的估計,那究竟誰的話更可信呢?
在本文中,不妨用每脫離一次行駛的英里數(miles per disengagement,MPD,自動駕駛脫離)來衡量某系統的表現。所謂的脫離,大概的意思是指當技術失效需要安全司機接管的時候。好的無人車這個數字會很大——意味著車子可以自行行駛很長距離,很少會失效。
摩爾定律?
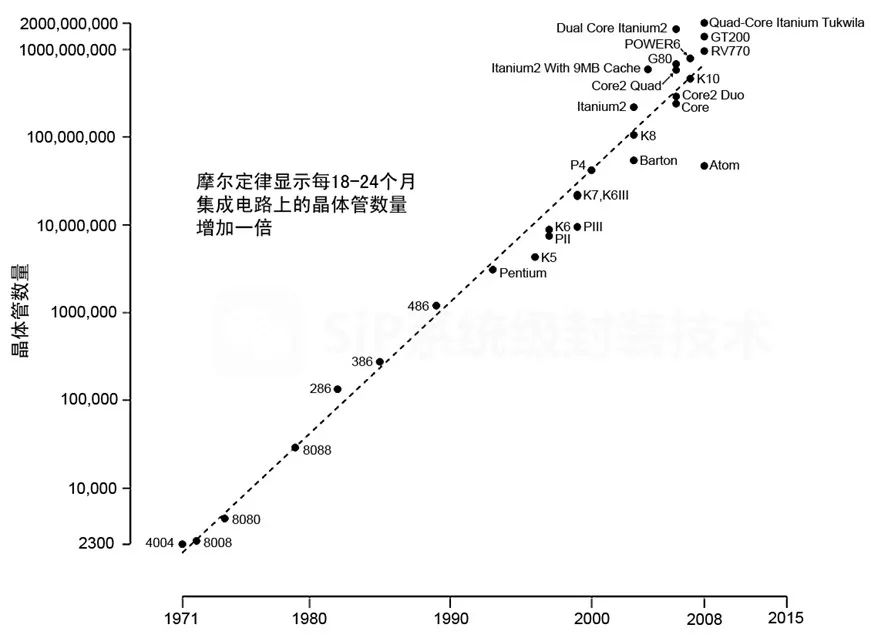
為了回答開頭的那個問題,我決定用摩爾定律來進行比較。摩爾定律是一條經驗觀察,也就是晶體管的數量每 18 個月就會翻番。這屬于指數式的增長——是摩爾定律讓你的手機一舉超越了你 2000 年時候的計算機。
指數式增長是很罕見的。比方說,樹和人都是線性生長的,這種速度要慢得多。大多數有指數式增長的東西都難以為繼;比方說,細菌在變得太過擁擠之前就是指數式繁殖的。實際上,摩爾定律似乎已經無法在計算機上維持了!
話雖如此,技術在早期以指數式的速度發展并不是不尋常之事。這是一個樂觀的假設,但如果你想對世界因為技術而改變的速度有多快做出大膽的未來主義預測的話,你應該假設會出現指數式增長。
那么現在,我們就來對無人車的未來做出大膽的樂觀的預測。我們將假設技術的改進會有指數式增長。換句話說,我們將為無人車計算摩爾定律。但你可能不會喜歡這個答案。
數據
2004 年,最好的無人車是 CMU(卡內基梅隆大學)的 Sandstorm,它「贏」得了第一家屆 DARPA 挑戰賽,成績是 150 英里的總賽程走了 7.4 英里,然后就卡在一個路堤上,輪胎徒勞無功地打轉到冒出白煙(這可不是數落它,其他人的車表現更糟!)。我們打個折姑且算它的失敗率是每 10 英里失敗一次吧。
2018 年,Waymo 的數據是每次放手(disengagement,由加州定義,大概是「技術失效」的意思)可行駛 11017 英里。這大概相當于每失效前可走 10 的 4 四次方英里。
有了這兩個數據點,我們就可以計算無人車的摩爾定律了。
……自動駕駛脫離里程數大概每 16 個月就會翻番……
無人車的摩爾定律幾乎跟計算機的摩爾定律一模一樣——性能每 16 個月翻番!這是一個宇宙級的巧合!
上面的黑線代表了無人車從 2004 年 DARPA Urban Challenge 到 2018 年間所取得的進展。我們可外推出那條線(紅)然后看看那條線跟人類表現(藍)什么時候出現交叉。Y 軸是對數標尺,所以指數增長會以直線形式體現。
關鍵問題是「系統需要有多好的表現?」假設目標是能跟人的表現媲美。人類其實是非常出色的司機,每 1 億(10^8)英里才有一次致命事故!我們可以把這一點放到這個背景下理解:人類司機一輩子平均的行駛里程大概是幾十萬英里。而每一輛無人車的行駛里程可能不到 2000 萬英里。
迄今為止,人類的表現(致命事故間隔 10^8 英里)與表現最好的無人車(每次放手可行駛 10^4 英里)之間的差距是 10000 倍。換句話說,無人車的表現是人類的 0.01%。
哪怕每 16 個月表現翻番,無人車也要用 16 年的時間才能趕上人類水平——也就是 2035 年。那些宣稱 2019 或者 2020 年就能實現無人車的說法看起來就比較可疑了。(當然,我們會看到引人注目的無人車公司的演示,這只是為了展示他們的技術。未必意味著他們的系統表現跟人一樣好!)
很多無人駕駛的失效只是導致受傷而不是致命的。人類發生兩次致傷事故的行駛里程間隔「只有」10^7 英里,所以如果我們假設無人車失效從來都不會導致致命事故(只是致傷)的話,前面的預測就可以減少 4 年。但仍然需要 12 年才可以達到人類的表現。
所以概括起來,有幾點需要注意:
無人車大概每 16 個月就性能翻番。這是無人車的摩爾定律。
目前無人車的表現大概相當于人類司機的 0.01%,自動駕駛的士在 2035 年以前可能還是個夢想。
這個預測有兩個漏洞。可能會有新技術的出現來改變這條增長曲線。或者公司可以決定去實現難度略低于「任何時間去到任何地方」的應用。
對于自動駕駛的士公司來說這可能是個壞消息,但卻是通勤公司的好消息。
附錄
如果你注重細節的話,這里還有 3 點需要考慮:
第一點
無人車的「摩爾定律」依賴于我們使用的數據。如果你認為無人車公司對自己車子的性能估計過于樂觀的話,自動駕駛的士的實現可能還要往后推。
另一方面,如果你相信當今最好的無人車駕駛要比 Waymo 的公開數字好 10 倍(比如每次放手可行駛 110000 英里)的話,那么改進率就要比上面的計算快得多。但即便是今天的系統駕駛得有這么好,也仍然需要到 2028 年才能達到人類司機的水平。
第二點
本文在前面所做的一個關鍵假設是技術會以指數的速率改進。這一假設推算出脫離率每 16 個月就會翻番。這個數字是樂觀的:我們精心挑選了 2004 年的一個非常低的自動化率,同時擇優挑選了 2018 年最好的商用數據,這往往會造成一幅進展神速的畫面。
要想看看這一假設有多樂觀,可以看看加州的公共呈報情況。AV 公司是不是在以指數式的速率在增長?如果是的話,這個速率是不是快于或者慢于 16 個月?
Waymo 的數據是按年提供的,我只能找到 4 年的數據。注意,這條曲線不像上面是對數式的;如果趨勢是指數式的話,我們會看到一條向上急彎的曲線。Waymo 2018 年報告的表現 2 倍于 2017 年,但 2017 年基本上跟 2016 年持平(而 2016 年相對于 2015 年來說是個豐年!)。這意味著什么?這個數據我們可以用指數去套,能夠得出每 16 個月翻番的結論。(注:數據匹配還有很多種方式。我是把 2015 年設為元年,然后以 A*exp(Bt) 的形式用最小二乘法擬合)但是這種擬合其實挺差勁的——如果你想知道的話可以看看附錄 2。為了方便討論,這 4 個數據點用線性擬合看起來也一樣可信(這樣的話自動駕駛的士可能就要 20000 年后才能實現。)但是 16 個月再次出現這難道不是很優雅的嗎?
Cruise 的逐月數據也是向上發展的,但是數據的噪聲很多。利用上述相同的擬合策略的話,我們會得到每 18 個月性能翻番。
盡管現實世界的數據充滿了挑戰,有趣的是最后得出的結論跟 16 個月比較接近。這讓大家的發展都在一個水平線上的想法有了一定的可信度,也因此自動駕駛的士在 2035 年之前大概都不會實現。除非,第三點。
第三點
加州對脫離的定義排除了很多類型的干預,所以這本身就是對技術成熟度的樂觀度量。換句話說,這些脫離率數字只是大概相當于公司預計技術會有效但出現了系統失效的情況,并沒有包含到那些不指望技術能行的情況。
所以,在本來就不指望系統能行的情況下系統的表現當然是很糟糕的了!但如果問題是「我們距離可行的、幾乎能去任何地方自動駕駛的士還有多遠?」,那就還有一大類沒有被考慮在內的駕駛場景會讓你遲疑一下。
Waymo 在 2016 年的信息披露進行了很好的概括:
DMV 規則對脫離的定義是自動模式在兩種情況下的去激活:(1)「檢測到自動技術失效」,或者(2)「當車輛的安全操作需要無人車測試司機解除自動模式,馬上對車輛采取手動控制時」按照這一定義,DMV 指出:「這一澄清對于確保制造商不會報告每一種常見的或者例行的脫離是必要的。」
作為測試的一部分,我們的汽車每天會多次切換自動模式。每年這些脫離數都會有好幾千次,盡管絕大部分可被視為常規動作而非安全相關的原因。安全是我們的最高優先級,Waymo 的測試司機都是受過培訓的,會在很多情況下采取手動控制,不僅僅是在安全操控「需要」他們這么做時。我們的司機原則上是寧求穩妥也不愿涉險,如果他們對繼續自動模式的安全性存在疑慮的話就會采取人工控制(比方說,由于附近無人車或者任何車輛、行人、或者自行車手的行為),或者因為其他關切需要有人工控制的保障,比如改善乘坐舒適度或者緩解交通流量時。類似地,無人車的計算機在很多不涉及「自動技術失效」,無需司機馬上接管的情況下也會將控制交給司機……
附錄2
以下是 Waymo 和 Cruise 數據擬合出來的曲線。這些模型大部分情況擬合都相當好,但我認為你可以很可靠地得出結論,要想證明改進率比這里計算的要高得多基本上已經很難。
Waymo 的 MPD 與指數擬合的疊加。指數曲線正好對應每 16 個月性能翻番,但是這種擬合其實相當糟糕。
Cruise 的 MPD 與指數擬合疊加。這個擬合尤其有疑問,因為存在一些噪聲。但還不清楚指數擬合是否合適。
這里還是 Cruise 的數據,導致問題的峰值被手工去掉了。這類數據修補在統計學上是不合適的,所以對此可以持保留態度吧。這條曲線擬合顯示性能可以每 7.5 個月翻番,但是曲線其實跟數據是不契合的,尤其是右側擬合已經高于真實數據。
-
摩爾定律
+關注
關注
4文章
635瀏覽量
79093 -
無人駕駛
+關注
關注
98文章
4074瀏覽量
120615 -
自動駕駛
+關注
關注
784文章
13853瀏覽量
166579
原文標題:自動駕駛的摩爾定律:無人駕駛的最終實現時間或在2035年丨厚勢汽車
文章出處:【微信號:AItists,微信公眾號:人工智能學家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
重載自動駕駛平板車HAV
UWB模塊如何助力無人駕駛技術
美國自動駕駛:十年磨一劍,搶占智能未來先機
自動駕駛汽車安全嗎?

自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
特斯拉推出無人駕駛Model Y
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛的研發為無人駕駛的應用鋪設了堅實基石
“自我實現的預言”摩爾定律,如何繼續引領創新
Mobileye引領自動駕駛新紀元:L4級無人駕駛系統在德國成功路測
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
用于自動駕駛,無人駕駛領域的IMU六軸陀螺儀傳感器:M-G370
功能密度定律是否能替代摩爾定律?摩爾定律和功能密度定律比較





 工商網監
工商網監
評論