") 怎樣使用游戲控制器和Arduino控制機(jī)器人
怎樣使用游戲控制器和Arduino控制機(jī)器人
Arduino和類似的兼容板是世界各地DIY修補(bǔ)匠的首選設(shè)備之一。無論您是剛開始使用Arduino的初學(xué)者,還是已經(jīng)開始使用它們的人,他們都為無數(shù)很棒的項(xiàng)目提供了平臺。
今天,我們將探索一種創(chuàng)新的方式使用處理和Xbox360控制器來控制伺服器。如果您已經(jīng)很精通游戲開發(fā),那么您可能會對我們的使用Unity的Custom Game Controller教程感興趣。
如果這是您第一次嘗試Arduino擺弄,則本教程將假設(shè)您具有一點(diǎn)先驗(yàn)知識,您可能會在這里找到我們的Arduino指南。同樣,如果您是第一次使用Java,可能會有些混亂。雖然Processing使用該平臺的簡化版本,但這些Java概念和提示仍可能會有所幫助。
您需要的內(nèi)容
1個Arduino。我們今天使用的是UNO。
1個業(yè)余伺服器。一切適用于Arduino引腳的東西。
1個有線Xbox360控制器。盡管從技術(shù)上講,這幾乎可以與任何控制器一起使用。
多條連接線。
除了這些內(nèi)容之外,您還需要下載Processing和Arduino IDE
準(zhǔn)備Arduino
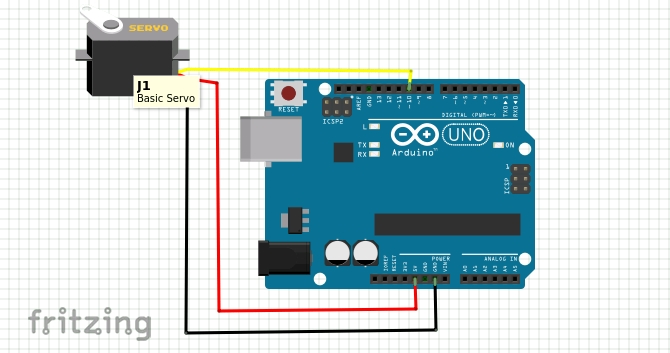
首先,我們需要附加伺服器。接線顏色在這里可能會有所不同,但一般來說,紅色引腳會連接到 5v 引腳,并且棕色或黑色連接到 GND 引腳。數(shù)據(jù)線通常為黃色或橙色,連接到 pin 10 。
檢查接線并連接Arduino到計算機(jī)。打開Arduino IDE。
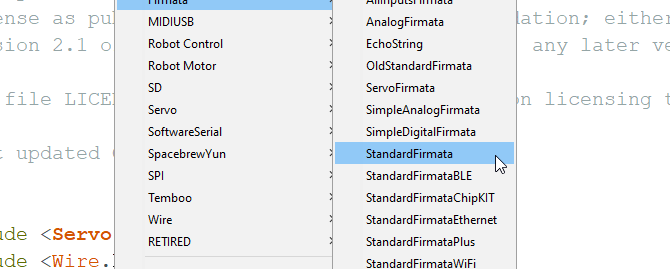
打開位于文件》示例》 Firmata》 StandardFirmata 的StandardFirmata草圖。此草圖設(shè)置了用于通過串行端口進(jìn)行外部控制的電路板,與我們在使用Python控制Arduino的文章中使用的草圖相同。將草圖上傳到板上。
如果上傳失敗,請在工具菜單中檢查您是否選擇了正確的板和端口詳細(xì)信息。
我們的Arduino準(zhǔn)備就緒!
設(shè)置處理程序
打開處理程序,您將得到一個空白的草圖。在這里做任何事情之前,我們將需要安裝一些庫。轉(zhuǎn)到素描菜單,然后選擇導(dǎo)入庫》添加庫。這將打開 Contribution Manager ,對于那里的所有Arduino用戶而言,它們看起來都很熟悉。
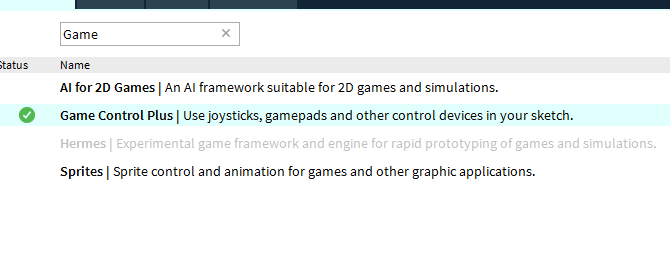
我們需要安裝三個庫來完成這項(xiàng)工作。首先是 Game Control Plus 庫。這就是允許我們將游戲控制器與處理一起使用的原因。使用搜索窗口找到它,然后單擊右下角的安裝。 Game Control Plus需要為其配置工具安裝另一個庫,所以現(xiàn)在就開始獲取它。搜索 G4P 庫并安裝它。
最后,我們需要 Arduino(firmata)庫。您猜對了,進(jìn)行搜索,然后單擊安裝。安裝完這些東西之后,我們就可以開始測試一切正常。我們今天正在使用Windows 10,但是可用于大多數(shù)平臺(包括Raspberry Pi)進(jìn)行處理。想象一下可能性!
測試Arduino
在我們開始創(chuàng)建自定義草圖之前,我們先來測試Arduino和Servo和Processing。打開文件》示例,然后從 Contributed Libraries/Arduino(firmata)文件夾中選擇 ArduinoServo 。我們將使用它來測試我們的伺服器,但首先我們可能需要更改幾件事。
向下滾動草圖并找到以下行:
println(Arduino.list());
如果已將其注釋掉,請在 println(Arduino.list()); 之前刪除兩個斜杠,然后保存草圖。通過單擊播放圖標(biāo)運(yùn)行它,并注意底部的控制臺。這將列出連接到您的 COM 端口的所有內(nèi)容。
就我而言,我的Arduino在COM 8上這里列出的第三個端口。這很重要,因?yàn)橄旅嬉恍兄械拇a有一個 Array ,其值確定要使用哪個COM端口。
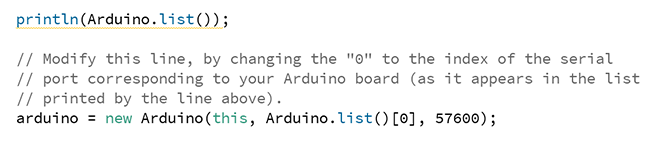
需要更改它以反映我們的COM端口。對我來說,它是第三個位置,或索引編號2:
arduino = new Arduino(this, Arduino.list()[2], 57600);
我們需要對此代碼進(jìn)行其他一些小的更改才能對其進(jìn)行測試。向下滾動到設(shè)置Arduino引腳的位置,并在此處注釋掉其中一行。將另一個更改為 Pin 10 。
//arduino.pinMode(4, Arduino.SERVO);
arduino.pinMode(10, Arduino.SERVO);
我們需要在 Draw()中執(zhí)行相同的操作方法:
arduino.servoWrite(10, constrain(mouseX / 2, 0, 180));
// arduino.servoWrite(4, constrain(180 - mouseX / 2, 0, 180));
保存草圖并運(yùn)行。您應(yīng)該能夠通過在程序生成的窗口上來回移動鼠標(biāo)來移動伺服器。
如果它不適用于您,檢查伺服接線,并檢查COM端口的陣列位置是否正確。一旦您知道Arduino與Processing的配合很好,就該繼續(xù)了。
配置控制器
我們正在使用的Game Control Plus庫也具有強(qiáng)大的配置。確保已插入控制器,打開 Configurator 示例項(xiàng)目,然后運(yùn)行它。您將獲得如下菜單:
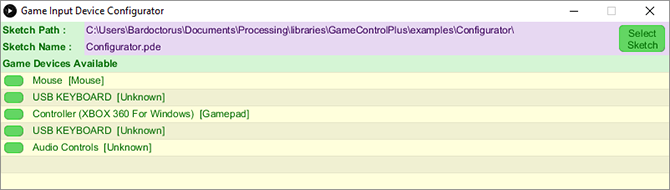
單擊您的控制器名稱,將彈出一個更大的配置窗口。
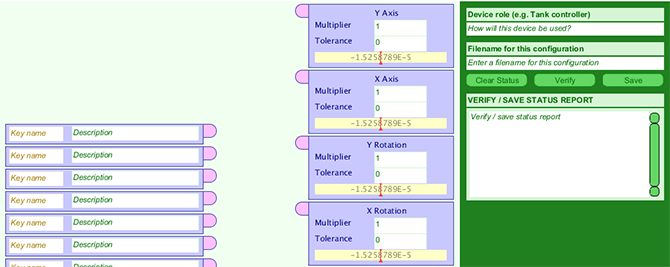
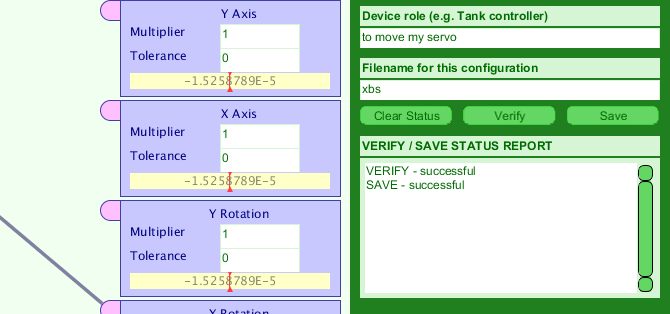
這看起來似乎很艱巨,但是它的設(shè)計盡可能簡單。在左側(cè)填寫第一個鍵,其中包含您要用作變量的名稱。此變量將控制伺服器的位置,因此我將其稱為 servoPos 。
在其旁邊的框中,您可以對其功能進(jìn)行簡要說明。現(xiàn)在,拿起控制器并移動您希望與伺服器一起使用的操縱桿。進(jìn)行一些實(shí)驗(yàn)后,發(fā)現(xiàn)右指尖與“ X旋轉(zhuǎn)”框相對應(yīng)。在 servoPos 變量和此框之間拖動一條線。
現(xiàn)在,我們需要將配置保存為數(shù)據(jù)文件。在窗口的右上方,填寫設(shè)備角色字段和文件名字段。
文件名很重要,因?yàn)槟鷷谀拇a中使用它。我將其命名為 xbs 來保持簡單。點(diǎn)擊驗(yàn)證,然后點(diǎn)擊保存。這將為我們的控制器編寫一個包含說明的文件,以后可以使用。
準(zhǔn)備自定義草圖文件夾
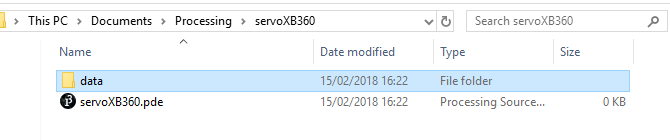
讓我們進(jìn)行設(shè)置我們的工作文件夾。打開一個空白的處理草圖,并以您喜歡的任何名稱保存。這樣會在保存位置為其創(chuàng)建一個目錄。
現(xiàn)在導(dǎo)航至 Documents/Processing/libraries/GameControlPlus/examples/Configurator ,然后復(fù)制標(biāo)有 data 。此文件夾包含我們剛剛創(chuàng)建的配置文件。導(dǎo)航到新保存的空白草圖的目錄,然后粘貼數(shù)據(jù)文件夾。
創(chuàng)建自定義草圖
現(xiàn)在所有內(nèi)容到位,我們可以使用我們的兩個庫開始制作草圖。我們將逐步進(jìn)行此操作,但如果您想繼續(xù)前進(jìn),可以下載完整的草圖和數(shù)據(jù)文件夾。請注意,您可能仍需要修改代碼以反映您的Arduino COM端口。
首先導(dǎo)入我們需要的所有庫:
import processing.serial.*;
import net.java.games.input.*;
import org.gamecontrolplus.*;
import org.gamecontrolplus.gui.*;
import cc.arduino.*;
import org.firmata.*;
我們還需要聲明 ControlDevice , I/O 和 Arduino 以及 float 來保存值從我們的指尖開始:
ControlDevice cont;
ControlIO control;
Arduino arduino;
float thumb;
我們的 setup()方法會創(chuàng)建一個小窗口(控制器的實(shí)例),并將設(shè)備與我們的配置進(jìn)行匹配文件。在此重要的是正確獲取配置數(shù)據(jù)文件的文件名:
void setup() {
size(360, 200);
control = ControlIO.getInstance(this);
cont = control.getMatchedDevice(“xbs”);
if (cont == null) {
println(“not today chump”); // write better exit statements than me
System.exit(-1);
}
// println(Arduino.list());
arduino = new Arduino(this, Arduino.list()[2], 57600);
arduino.pinMode(10, Arduino.SERVO);
}
我們還在此階段檢查是否沒有適用的控制器,然后退出該程序是否需要。雖然不需要使用 size()創(chuàng)建的窗口,但稍后會向我們提供一些有關(guān)是否從控制器中獲取有用值的反饋。我們也像測試時一樣初始化Arduino并將其固定在此處。
現(xiàn)在,我們創(chuàng)建一個小方法來從控制器中獲取輸入值,并將其映射到我們的伺服器將能夠使用的值:
public void getUserInput() {
thumb = map(cont.getSlider(“servoPos”).getValue(), -1, 1, 0, 180);
}
這一行代碼使用我們的數(shù)據(jù)文件來獲取命名控件 servoPos ,該控件鏈接到控制器的右指尖,并從中讀取值。然后它將值映射,并將值存儲在我們的 thumb float變量中。
現(xiàn)在此代碼從未調(diào)用過,我們現(xiàn)在將對其進(jìn)行修復(fù)。
void draw() {
getUserInput();
background(thumb,100,255);
arduino.servoWrite(10, (int)thumb);
}
draw()與Arduino IDE中的 loop()方法相似。每幀,它調(diào)用 getUserInput()方法并更新拇指值。它使用此值來更改 background()的紅色值,從而使我們可以直觀地看到值的變化。然后使用 arduino.servoWrite()函數(shù)將此值寫入伺服器。請注意,我們必須將 thumb 強(qiáng)制轉(zhuǎn)換為整數(shù)值,因?yàn)镾erveWrite函數(shù)將兩個整數(shù)(引腳號和角度)作為參數(shù)。
檢查代碼是否存在錯誤,保存并單擊運(yùn)行。在稍稍延遲了Arduino的初始化之后,它看起來應(yīng)該像這樣:
使用游戲控制器和Arduino進(jìn)行控制:已完成!
盡管經(jīng)驗(yàn)豐富的代碼庫可以為我們提供幫助,但該項(xiàng)目在很多方面對于經(jīng)驗(yàn)不足的編碼人員來說都是相當(dāng)深入的。它代表著一種思考控制機(jī)器人以及您所構(gòu)建的任何其他設(shè)備的新方式。
該項(xiàng)目將與我們有關(guān)構(gòu)建激光炮塔的指南完美配合,使您可以完全控制它。您可以像我們的Simple Arduino Alarm教程中那樣設(shè)置壓電式蜂鳴器,并使用控制器來更改蜂鳴器的音高或燈光的顏色。
或者,您可以構(gòu)建一個大型機(jī)器人并采用在地球上。只要您的USB線足夠長!
責(zé)任編輯:wv
-
控制器
+關(guān)注
關(guān)注
112文章
16390瀏覽量
178442 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28476瀏覽量
207421 -
Arduino
+關(guān)注
關(guān)注
188文章
6471瀏覽量
187293
發(fā)布評論請先 登錄
相關(guān)推薦
工業(yè)機(jī)器人控制器的主要功能有哪些
伺服控制機(jī)器人的控制方式有哪些
人形機(jī)器人控制器之MCU、DSP、AI芯片
如何使用PLC控制機(jī)器人
簡述工業(yè)機(jī)器人控制系統(tǒng)的特點(diǎn)
機(jī)器人控制系統(tǒng)的基本單元有哪些
機(jī)器人控制系統(tǒng)按控制方法可哪些種類
工業(yè)機(jī)器人電氣控制系統(tǒng)的體系結(jié)構(gòu)主要有哪些
工業(yè)機(jī)器人控制系統(tǒng)的基本組成有哪些
簡述機(jī)器人控制系統(tǒng)的組成
工業(yè)機(jī)器人中視覺控制器的種類和作用
恩智浦MCX微控制器增強(qiáng)移動機(jī)器人電機(jī)控制能力
基于飛凌嵌入式RK3568J核心板的工業(yè)機(jī)器人控制器應(yīng)用方案
基于OpenVINO?的諾達(dá)佳機(jī)器人控制器實(shí)戰(zhàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論