 電磁波微分差技術怎么對付船運難題
電磁波微分差技術怎么對付船運難題
本文針對雷達工作特點提出了一個新的航行方法,通過利用雷達反射回波得到測量物標高度,并結合測深儀深度數據,將測量物標精度進一步提高,為駕駛員安全航行狹水道等水域提供安全保障,同時解決了船舶過橋同步測高問題。在提高航行效能的同時,在船舶操縱與避碰方面也提供了便利。
目前,船舶駕駛主要依靠電子設備航行,雷達的使用,大大加強了海上瞭望的力度,不單單減輕了駕駛人員的勞力,同時也增加了船舶航行的安全。但是,目前船舶雷達的測量只限于平面測量,對于測到的許多目標并不是可以完全解析。船舶在峽水道航行時,雷達探測到的小目標在顯示屏上被降噪設備抑制掉,許多有用的信息沒有很好的應用,因此,改造雷達對于船舶在狹水道、分道通航制等狹窄水域航行顯得十分重要。
1狹水道航行問題分析
船舶在進出航道、狹水道、島礁區和某些沿岸水域,存在著一些淺水區。當船舶(特別是大型船舶)航行到這些區域之前,首先要確定本船是否能夠安全駛過。這由兩個問題所決定,一是船舶要通過的淺水區所要求的最小安全水深,即船舶安全駛過淺水區,當時的實際水深必須大于或等于最小安全水深,傳統上對于安全水深的計算為:
海圖水深+潮高+(CD-TD)≥船舶吃水+富余水深
這就要求潮高必須大于或等于一個最小安全值,該值便為最小安全潮高:
最小安全潮高=吃水+富余水深-海圖水深-(CD-TD)
在某些水道的上空,還建有橫跨水道的橋梁或高空電纜等,這些建筑物構成了船舶航行的空中障礙物。為確保安全通過這些障礙物,必須仔細計算潮高。然而高架橋底部至平均大潮高潮面的距離為凈空高度,它和大潮升之和為潮高基準面以上的可利用高度。而潮高基準面以上相對船舶航行所要求的安全高度為當時潮高、水面以上船舶的最大高度和為了保證安全通過所要求的安全余量三者之和。由于可利用空間對于某個橫空障礙物是固定的量,為了船舶的安全通過,潮高就不能大于某值,這即是所謂的最大安全潮高。
最大安全潮高=大潮升+凈空高度-水面至船舶大桅頂端的高度-安全富余量
根據船舶本身情況和航道條件求得安全潮高后,便可根據《潮汐表》求得合適的通過淺灘或橫空障礙物的時間,以便船舶安全通過。(如圖1)
顯然,船舶在航行中在計算過橋防擱淺問題上有三點不利因素:
(1)潮汐計算具有靜態和動態問題。所要的水深數據來自測深儀前一時間測得,而船在航行中,峽水道的河床并不是全部都是一樣的高度,它是高低起伏存在變化,因此,所計算的數據在船舶過大橋時,存在著安全風險。
(2)潮汐計算不準確。船舶在峽水道中航行,船只較多,如果趕上潮汐在回轉期間,計算的結果就更不準確,并且分散駕駛員操船的注意力,原本在狹水道航行精神就比較緊張,再加上繁瑣的過橋潮汐計算,很容易導致疲勞駕駛,給船舶的航行安全帶來隱患。
(3)河床地形存在不確定性。河床不是一成不變的,伴隨的潮汐和地殼運動以及海事或其他因素影響,海圖深度每時都在變化,然而海圖水深則是根據英版航海通告每周更改,這就導致航行數據更新慢,并且不全面,給峽水道航行的船舶帶來隱患。
2雷達改進理論研究
根據以上3點船舶過橋安全隱患,提出了改造方案。時時跟蹤測繪安全余量和富余水深,為駕駛員準確提供數據,判讀過橋位置。
測量安全余量的計算為:h=2.2(√Ha+√Ht)tanθ
應用公式設置在計算程序時需注意的問題
(1)它是建立在大氣壓強為1013hpa
(2)在海平面上溫度為15℃
(3)相對濕度為60%,在整個對流層內相對濕度不隨高度變化。
第二種解析公式計算方法:
HMAX=TANθ(PTG A?λ?δ0/64π?pmin)?
式中:PT---雷達峰值功率(w);G A---天線增益;λ---工作波長(m);pmin---接收系統門限功率(w)δ0---目標的有效散射面積(m?)由于距離為開四次方根的結果,因此在影響目標的雷達測高的所有因素中,每一項技術參數的影響都是有限的。
3改進后雷達的應用
下面對性能標準達到要求的雙波段雷達能夠發現典型目標的參考距離進行分析,標準雷達天線高于水面15米,海面無雜波干擾、無降水的正常大氣傳播條件下:
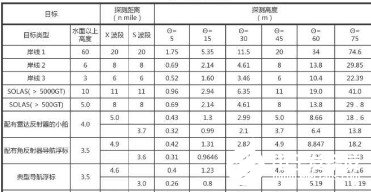
通過以上表格得出雷達在測量大目標上,幾乎沒有分別,但是在小目標的發現能力上,X波段的雷達具有優勢,使用X波段雷達的船舶可以在較遠的距離發現小目標。
通過以上數據可以得出,由于船舶的接近某個物標,探測到的高度角越來越小的特點,同時所測到的距離距離也越來越近。利用這一特性,對當前水域以三維形式掌握,無論是水下起伏的變化,還是對小島、燈塔、岬角等均有突出物進行定位精確的導航。
4結論
本文通過采用雷達電磁波微分差技術,改善了雷達一維測量的缺陷,達到了提高航行安全的目的。通過提高雷達的測量數據利用率,將雷達與測深儀數據進行合成計算,其數據結果將大大提高對在狹水道、分道通航制等狹窄水域航行的船舶安全。
-
雷達
+關注
關注
50文章
2930瀏覽量
117465 -
電磁波
+關注
關注
21文章
1454瀏覽量
53821 -
測量導航
+關注
關注
0文章
2瀏覽量
5563
發布評論請先 登錄
相關推薦
電磁波引擎
電磁波正交極化,電磁波正交極化原理是什么?
電磁波的應用教程詳解
電磁波是如何產生的_電磁波由什么組成_電磁波對人體的危害
電磁波輻射對人體影響_電磁波輻射的原理_如何防止電磁波輻射
電磁波如何產生
電磁波極化及其應用
如何消除電磁波的干擾

如何隔離電磁波





 工商網監
工商網監
評論