 伺服電機的三種控制場景模式
伺服電機的三種控制場景模式
伺服電機作為一個高精度的控制電機,已被廣泛的運用與各個行業。一般地,伺服電機在運用過程中,有三種控制場景模式。分別為位置模式、速度模式、轉矩模式。
位置模式(如使用伺服電機進行定位控制)
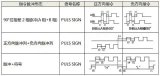
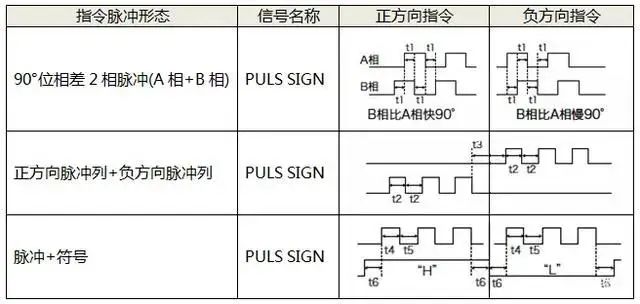
伺服電機作為位置模式運用的場景是運用得最最廣泛的。可以采用脈沖的方式,通過控制上層控制器輸出的脈沖總量,進行伺服電機的位置控制,使用的過程中,通過控制伺服電機的脈沖量實現定位位置的控制,控制伺服電機脈沖輸出速度實現速度的控制。在系統較為復雜的系統中,使用總線的方式實現伺服電機的控制亦是非常不錯的選擇。如CAN、Ether CAT等,可以大量的減少系統接線,簡化系統。
速度模式(如使用第三方運動控制器和伺服電機進行全閉環控制的場景)
速度控制模式的方式可以通過控制脈沖速度、模擬量輸入、總線等實現。在某些對伺服電機運行過程中速度控制嚴格的場景,可以選用伺服電機的速度模式實現。如在使用第三方運動控制器實現高精度全閉環運動控制的過程中,應將伺服電機配置為速度模式。
力矩模式(如使用伺服電機控制螺栓擰緊機)
力矩模式一般運用于對輸出力矩控制嚴格的場景。如螺栓擰緊機,運行過程中需要控制螺栓擰緊的輸出力矩。通過控制扭力的大小,確保螺栓被確實有效的擰緊。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制
+關注
關注
4文章
1011瀏覽量
122656 -
伺服電機
+關注
關注
85文章
2044瀏覽量
57810
發布評論請先 登錄
相關推薦


淺談伺服電機的控制模式
伺服電機作為現代工業自動化領域中不可或缺的重要組成部分,其控制模式的精確性和多樣性對于實現高效、穩定、準確的運動控制至關重要。本文將詳細介紹





 工商網監
工商網監
評論