 工業鍋爐plc控制系統
工業鍋爐plc控制系統
1 控制系統的組件
工業控制系統ICS的組件根據其所處的位置,可大致分為兩類:控制中心設備和遠程站點設備。控制中心設備位于系統控制中心,包括人機界面(HMI)、工程師工作站和歷史記錄服務器(Historian)。遠程站點設備是駐留在生產現場,并直接連接到執行器和傳感器的設備,其主要功能是監督和控制物理過程。盡管現場設備通常不與人直接交互,但由于生產現場通常不如控制中心安全,所以更有可能受到攻擊和破壞。
1.1 控制中心設備
人機界面HMI(有時也稱為SCADA系統)是允許操作人員監視和控制過程的系統。人機界面HMI通常是在通用計算機上運行的純軟件應用程序,一般運行在微軟Windows系列操作系統環境中。工業領域常見的HMI包括Wonderware、西門子的WinCC、羅克韋爾的RSView和Areva e-terra等。
歷史記錄服務器Historian是一個記錄過程控制系統狀態歷史的數據庫服務器。在某些情況下,如果Historian的功能足夠強大,也可以作為控制系統的HMI使用。歷史記錄服務器Historian通常運行在主流的操作系統和通用硬件設備上,而且通常在企業網絡中有鏡像備份。
1.2 遠程站點設備
遠程站點設備包括PLC、遠程終端單元RTU、智能電子設備IED和電子繼電器。雖然這些設備的功能有很大差異,根據其所處的位置和相似性,可以大致組合在一起。另外,這些設備中使用的硬件結構也有相似之處,一般提供模擬或數字輸入/輸出(I/O)和控制功能。它們直接從傳感器讀取數據并向執行器發送操作指令,某些情況下,它們與其他現場設備連接在一起。
本文中對設備進行了簡化討論。其實,上面提到的這些設備(PLC、RTU、IED和電子繼電器)在控制系統對象關系模型(ORM)中都執行某個功能子集。例如,RTU通常是SCADA系統僅提供現場I/O控制的功能,通過現場I/O傳感器進行采樣,個別情況下,RTU會為執行器生成觸發器。電子繼電器將始終執行采樣和觸發功能。RTU將生成狀態數據字段點,有時還會處理命令數據字段點。繼電器將產生狀態數據字段點,但不太可能處理命令的數據字段點。RTU一般沒有本地控制功能,但繼電器具有該功能。除了與傳感器,執行器和上層控制功能通信外,PLC還具有重要的本地控制功能。這些功能看似相似,但在ORM中有很大不同。
2 典型控制系統架構
圖1顯示了典型的控制系統架構。其中,運行HMI的普通商用PC通過標準網絡協議(例如以太網)與PLC等現場設備通信。工程師站和歷史數據庫通常也是普通商用PC或服務器,通過標準網絡協議與現場設備通信。現場設備使用Fieldbus等基于以太網的工控協議連接到其他現場設備。有些現場設備采用RS232或RS485等標準的串行總線通信協議與智能設備連接,有些現場設備直接與傳感器、I\O設備和機器設備連接。
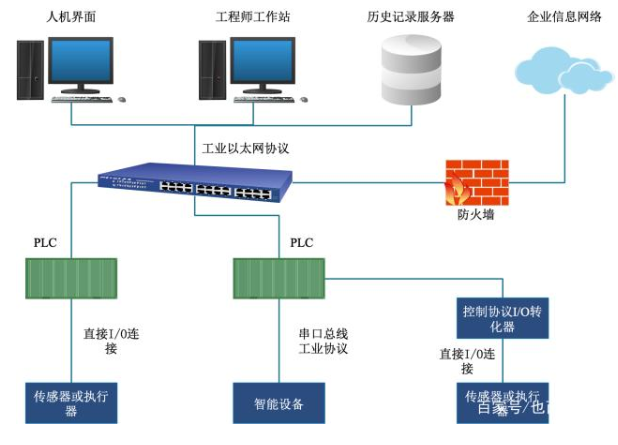
圖1. 典型的分布式控制系統DCS架構
3 可編程邏輯控制器PLC
PLC是一種現場設備,可以直接連接到傳感器和執行器或其他現場設備。PLC通過邏輯程序進行本地控制(一般根據IEC 61131-3標準定義格式),并且能夠通過控制系統通信協議從HMI接收控制命令和查詢請求。PLC可以是模塊化的,也可以組合成緊湊的固定形狀,但兩種類型基本上使用相同的底層組件。
3.1 PLC編程
PLC可以使用IEC 61131-3中列出的語言之一進行編程:
梯形圖(LD),圖形化
功能框圖(FBD),圖形化
結構化文本(ST),文本形式
指令列表(IL),文本形式
順序功能圖(SFC),圖形化
PLC在稱為“掃描”的循環周期中運行,掃描包括輸入、邏輯執行和輸出。
3.2 通用模塊化PLC架構
圖2顯示了通用模塊化PLC的基本架構。模塊化PLC通過背板連接的各個組成模塊。非模塊化PLC將所有組件集成在一個電路板中。

圖2. 通用模塊化PLC架構
3.3 PLC模塊交互
在圖2所示的通用PLC架構中,每個模塊都有一個物理插槽,并為其分配了一系列背板地址。接口寄存器和緩沖區存儲器在背板地址范圍內公開。通過模塊讀取、寫入寄存器或其他模塊緩沖區等方式,實現消息的發送和接收。
3.4 處理器模塊
處理器模塊是PLC的核心。它實現模塊之間的協調,有時還用作背板仲裁器。如果其他模塊不存儲自己的配置,則處理器模塊將在加電時對他們進行配置。
處理器模塊解釋并執行梯形邏輯,從通信模塊或者I/O模塊讀取數值,維護操作狀態,運行梯形邏輯的“掃描”周期并將輸出值寫入通信模塊或I/O模塊。
3.5 通信模塊
通信模塊從處理器模塊中取走通信協議相關的代碼。它們從處理器模塊取走時間敏感協議的交互數據,確保處理器模塊處于其自己的時間敏感控制回路中。由于某些控制系統協議非常復雜,通信模塊可能具有較強的處理能力,因此通信模塊可能會像處理器模塊一樣復雜。
3.6 I/O模塊
I/O模塊在低電壓(3.3伏或5伏)、低電流(毫安級)控制邏輯和高電壓(24伏以上)、高電流(安培級)過程控制之間轉換信號。模擬I/O模塊包含模數轉換器(ADC)和數模轉換器(DAC)。這些模塊邏輯相對簡單,智能硬件相對較少,其唯一的任務是在模擬信號和數字信號之間進行轉換。
3.7 通用處理器
PLC中最常見的處理器架構有三種類型:
ARM架構(7或9系列)
摩托羅拉/飛思卡爾68000系列架構
IBM的Power架構
ARM架構由總部位于英國的ARM公司設計,該公司擁有超過1700名員工。ARM不制造芯片,而是設計和授權芯片的知識產權(IP)。(1)ARM架構廣泛應用于嵌入式系統和設備,它在移動電話和個人數字助理(PDA)等消費電子產品中占有特別大的份額,市場份額超過90%。(2)ARM處理器可以以big-endian或little-endian模式運行,也可以使用ARM(32位)和Thumb(16位)指令集。ARM處理器通常是定制芯片系統(SOC)的一部分。
摩托羅拉(現為飛思卡爾)68000系列是一款32位復雜指令集(CISC)微處理器。它廣泛用于嵌入式系統中。在2000年時,它曾是世界上最暢銷的32位架構處理器,68000系列是big-endian。
Power架構包括PowerPC,是由IBM,Freescale,AMCC,Tundra和P.A. Semi等公司實施的精簡指令集(RISC)微處理器架構。Power架構采用big-endian字節序列。
3.8 存儲布局
PLC通常使用非易失性閃存存儲來存儲處理器模塊固件和梯形邏輯程序(或其他IEC 61131-3語言)。閃存存儲器的地址映射到處理器的地址空間,其他板載設備的控制寄存器也是如此。RAM用于存儲運行時狀態。
3.9 嵌入式操作系統
許多嵌入式操作系統被同時也是實時操作系統(RTOS)。要被視為RTOS,操作系統必須是“確定性延遲,或者保證最壞的中斷延遲或上下文切換時間”。
PLC經常使用商業RTOS實現,例如VxWorks、Windows CE或QNX。也可能使用自定義的“內部”操作系統。雖然目前還不常見,但一些制造商已開始在PLC上使用基于Linux的操作系統。
-
模塊
+關注
關注
7文章
2695瀏覽量
47433 -
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
plc
+關注
關注
5010文章
13271瀏覽量
463068
發布評論請先 登錄
相關推薦
PLC控制系統與DCS的區別
工業鍋爐水質監測物聯網解決方案

鍋爐吹灰器PLC數據采集系統解決方案
基于PLC的電機控制系統設計
什么是PLC控制系統?它有哪些特點?
PLC控制系統與繼電器控制系統的比較
PLC、DCS、FCS控制系統的區別
工業鍋爐遠程在線監控系統解決方案

工業鍋爐PLC如何實現數據采集和遠程上下載程序






 工商網監
工商網監
評論