 基于CANopen協議實現鋁合金板帶快速電磁鑄軋三層網絡通信系統的設計
基于CANopen協議實現鋁合金板帶快速電磁鑄軋三層網絡通信系統的設計
引言
新型鋁合金板帶快速電磁鑄軋技術是利用電磁感應裝置產生一個交變復合磁場來對鑄軋區內的鋁熔體進行電磁攪拌、電磁擾動等綜合控制,以改變鋁及鋁合金凝固結晶條件,從而達到細化晶粒,改善鑄軋板坯組織及性能的目的。
1 、鋁合金板帶快速電磁鑄軋系統
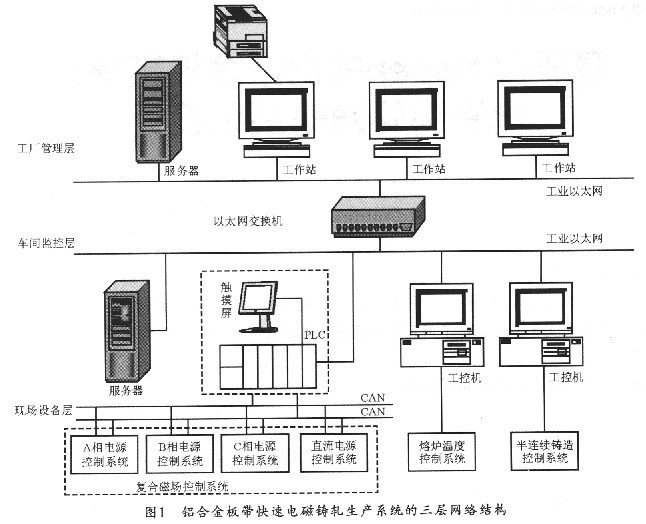
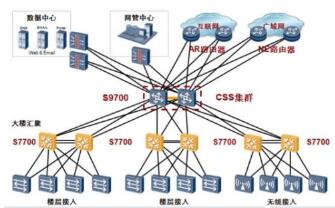
鋁合金板帶快速電磁鑄軋生產系統是一個復雜的大系統。它主要由鑄軋特種電源控制系統、熔爐溫度控制系統和軋機傳動控制系統三部分組成。該系統存在著大量的企業管理與決策信息和現場實時信息需要協調處理。為了適應鋁生產過程管控一體化和綜合自動化的需要,本設計采用基于工業以太網和現場總線技術的網絡化結構。圖l所示為鋁合金板帶快速電磁鑄軋生產系統的三層網絡結構示意圖,由圖可見,它通過工業以太網和現場總線技術的相互融合,從而有效解決了基礎自動化控制網絡與過程和管理控制系統之間的無縫集成問題,同時還為實現ERP(Enterprise Resource Planning)管理提供了良好的必要條件。下面主要設計基于CANopen協議的現場設備層的通信系統。
2、 CANopen簡介
CAN (Controller Area Network)是控制器局域網的簡稱,是德國Bosch公司在1986年為解決現代汽車中眾多測量控制部件之間的數據交換問題而開發的一種串行數據通信總線。該總線現已經被列入ISO國際標準(稱為ISO 11898)。CAN現場總線網是一種可有效支持分布式控制和實時控制的串行通信網絡,它有著很高的實時性、可靠性、抗干擾能力和驗錯能力,十分適合于鋁合金板帶快速電磁鑄軋生產過程的分布式網絡監控系統應用。
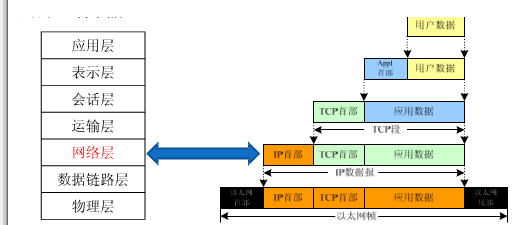
在OSI參考模型中,網絡系統結構被劃分為7層。而CAN只定義了第1層(物理層)和第2層(數據鏈路層),這兩層完全由硬件實現。由于沒有定義應用層,故其本身并不完整,還需要一個高層協議來定義CAN報文的11/29位標識符、8字節數據的使用。CANopen就是建立在CAN協議的物理層和數據鏈路層基礎上的標準化應用層協議,它包括應用層規范、通信協議和設備協議。CANopen是一種公共、開放、通用的協議,能夠在CAN網絡中提供標準的、統一的通訊模式以及設備功能描述方式,并可執行網絡管理功能。另外,由于其采用面向對象的思想設計,因此,具有很好的模塊特性和很高的適應性,而且精練透明、容易開發。
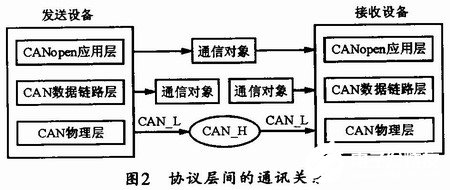
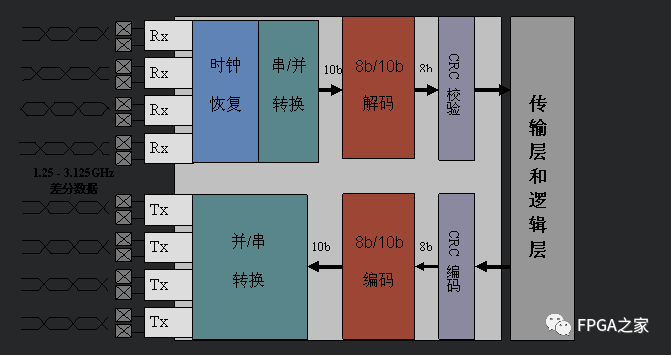
在CANopen應用層,設備之間交換的是通訊對象(COB),它們被映射到帶有標識符(ID)的CAN幀中,在數據鏈路層上傳輸。在物理層上,信號以兩線之陽的“差分”電壓形式出現,并用“顯性”(Dominant)和“隱性”(Recessive)兩個互補邏輯值來表示“0”和“1”。圖2所示描述了該協議層間的通訊關系。
CANopen協議對總線上傳輸的數據進行了分類,即每一個傳輸數據都是某一特定類的對象,從而實現面向對象的程序設計。基于CANopen協議的數據傳輸中共定義了4類通訊對象:一是過程數據對象(PDO),用來傳輸實時數據;二是服務數據對象(SDO),用來訪問對象字典中的設備配置參數;三是特殊功能對象,它包括同步(SYNC)對象和應急(Emergency)對象;最后是時間標記(Time Stamp)對象。
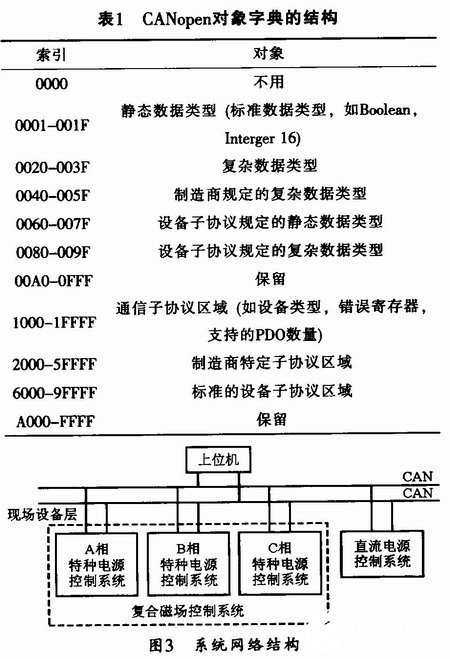
CANopen中的每一類通訊對象都有其規范化的格式,故可實現應用層結構上的統一。為了實現對各類對象進行規范化和方便管理,在CAN-open協議中定義了對象字典(ObjectDictionary,OD)的概念。每個設備都有一個獨有的對象字典,它描述了設備所使用的所有數據類型,包括描述這個和該網絡行為的所有參數。對象字典是具體應用于CAN總線通信接口之間的數據交換的媒介,是整個CANopen協議的核心。CANopen對象字典的結構如表l所列。
3 、系統硬件設計
3.1 網絡系統結構
基于CANopen的通信系統由上位機與現場設備層的電源控制系統(包括三相特種電源控制系統與直流輔助電源控制系統)共同構成。上位機通過CAN現場總線與下位機進行通信,以實現實時監控與控制系統功能。各個子系統之間也通過CAN總線連接進行通信。通信網絡拓撲結構采用總線式結構。其系統網絡結構如圖3所示。
3.2 下位機通信系統設計
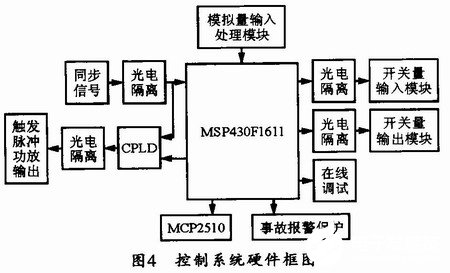
基于“MCU+CPLD”的設計是當前數字電路研究開發的一種重要實現形式。本控制系統將MCU和CPLD相結合,以用于鋁電磁場快速連續鑄軋特種電源控制,并將其作為系統的控制核心。
MCU采用美國TI公司的MSP430F1611,該器件是16位超低功耗MSP430系列微控制器中的一款。MSP430系列單片機(或稱為微控制器)是具有超低功耗特性且功能強大的單片機,它有多個子系列,其中MSP430F1x子系列是TI公司在2000年開發的、帶FLASH的單片機,其存儲器容量和片內外圍模塊隨著具體型號的不同而不同,用戶可以根據需要具體選擇。其控制系統硬件框圖如圖4所示。
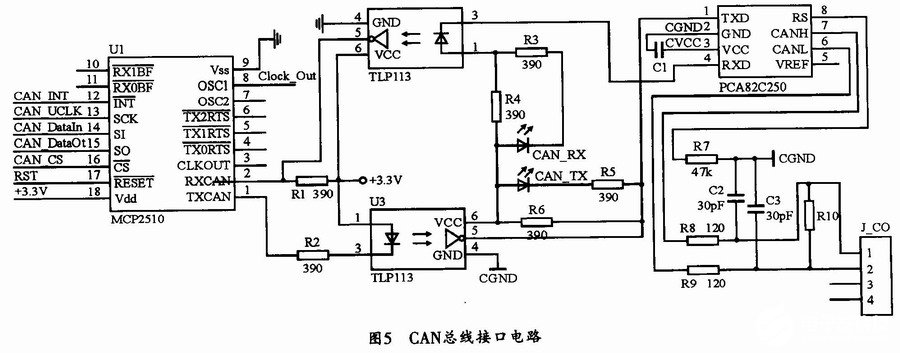
CANopen通信協議可由CAN通信控制器來實現。由于MSP430F16ll內部沒有集成CAN控制器模塊,因此需要在外圍進行擴展。本設計選擇美國Microchip公司的MCP2510作為系統的CAN總線通信控制器,圖5所示為CAN總線通信接口電路。MCP2510是帶有SPI接口的獨立CAN控制器,它完全支持CAN總線V2.0A/B技術規范,通信速率為lMbps,芯片包含三個發送緩沖器和兩個接收緩沖器,可以減少MCU的管理負擔。CAN總線收發器采用的PCA82C250是CAN控制器與物理總線之間的接口,可以提供對總線的差動發送和接收功能。兩個高速光電隔離器件TLPll3用來提高通信電路的抗干擾能力,防止總線上的干擾信號竄入控制器和MCU,同時也可以完成MCP25lO與82C250之間3.3V和5V電平的轉換。
MSP430F16ll的USART接口可支持兩種不同的串行協議,即通用異步協議(UART協議)和同步協議(SPI協議)。用控制寄存器UCTL中的控制位SYNC可選擇所需模式,當SYNC為0時,選擇異步模式UART;當SYNC=1時,選擇同步模式SPI。MCP2510可與USARTl通信模塊的SPI進行接口。
3.3 上位機設計
上位機要能完成對下位機監測及參數設置等功能。他的硬件選型及結構設計的好壞直接影響系統現場的工作效率。本系統選用PLC與觸摸屏相結合的方式來設計監控上位機。其中PLC是上位機的中心,利用PLC實現對上位機的監控,比采用工控計算機監控上位機更加符合現場操作的要求,并能夠適用現場高溫的惡劣環境,也具有更高的可靠性,同時還能夠方便地實現邏輯控制。而監控采用觸摸屏技術,也比鍵盤和鼠標操作更加簡單和方便,也更加符合現場操作習慣,可大大提高現場操作的效率。
本設計采用施耐德公司的Twido系列PLC。Twido PLC帶有多種不同的通信方式及接口,包括工業以太網、CANopen、MODBUS、AS-I。一般它最少帶1個標準的RS-485/422的串行通信接口,而且運算速度快,PLC循環周期短,擴展性能好。Twido PLC不僅具有眾多的開關量I/O擴展模塊,而且還具有眾多的特殊功能模塊可供用戶選擇,故可大大提高PLC的控制性能。系統中的處理器可選擇TWDLAE40DRF,它是一體型控制器,該控制器具有24點輸入,14點繼電器輸出和2點源型晶體管輸出,同時帶有一個RS-485端口和一個RJ-45以太網口,可直接接入工業以太網與上層網絡進行通信。該控制器本身不具有CAN通信功能,但可通過外接CANopen主站模塊TWDNC01M實現基于CANopen協議的CAN現場總線通信。
TWDNC01M CANopen主站模塊可安裝在PLC的擴展總線上,它支持16個從設備,但不支持對CAN從設備的擴展尋址,其傳輸速度決定于總線長度和電纜長度。用于連接到CAN現場總線的總線連接器位于TWDNC01M CANopen主站模塊的中下部,包含管腳CAN_L(CAN_L bus線)、CAN_H(CAN_H bus線),PLC通過這兩個有差動接收和發送能力的總線終端連接到CAN總線上。
為配合PLC的工作。監控平臺應選用操作方便的人機界面(觸摸屏),本系統選中eView公司的MT500系列觸摸屏MT510,其配套的軟件為EasyBuilder。EasyBuilder是組態軟件,主要用來配置各種元件。該軟件是專門面向PLC應用的,其功能非常強大,使用非常方便,完全可以滿足現代工業龐大的工作量及功能需求。
eView MTS00觸摸屏定義了RS-232和RS-485兩種通信接口,本設計選用RS-485接口定義。Twido系列PLC通過CPU單元上的通信端口與e-View MT500觸摸屏相連接,它們之間采用Modbus協議進行通信。
4 、系統軟件設計
4.1 CANopen標識符
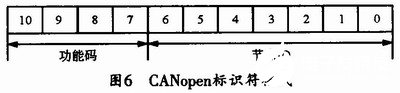
通訊對象的標識符(COB-ID)可唯一確定CAN網絡中的每個通訊對象及其優先級。通訊對象優先級的大小可通過標識符數值的大小來確定,標識符數值較小的優先級較大。CANopen信息幀的標識符分為兩部分,一部分為4位的功能碼,另一部分為7位的節點ID。功能碼代表數據幀的優先級,節點ID用于區別不同的節點,其標識符的格式如圖6所示。
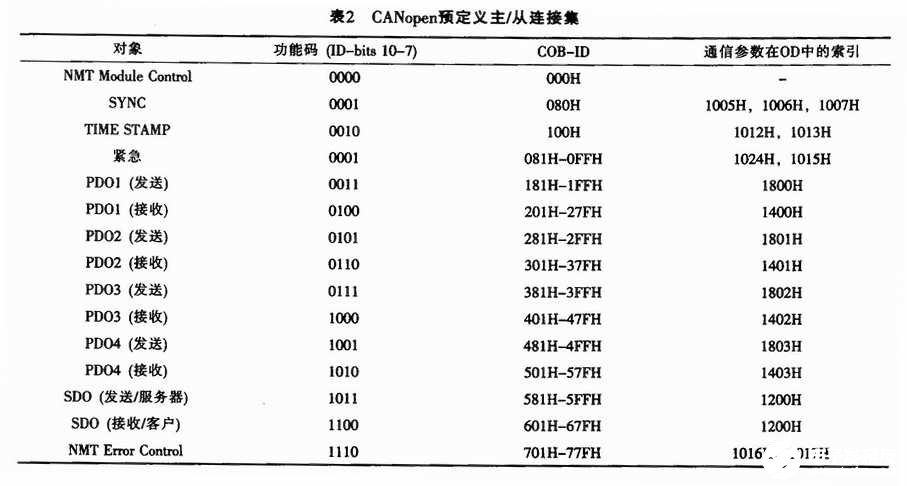
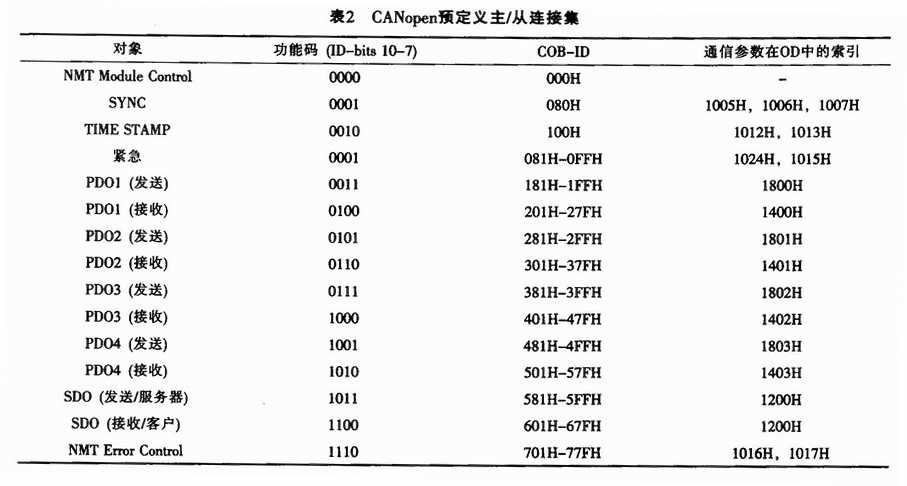
標識符的分配可以由預定義主/從連接集來實現。也可以由CALDBT服務進行動態分配。由于大多數通信系統的標識符的分配都可由預定義主/從連接集來實現,所以,本系統也采用預定義主/從連接集來實現CANopen標識符的分配。表2所列是CANopen預定主/從連接集。
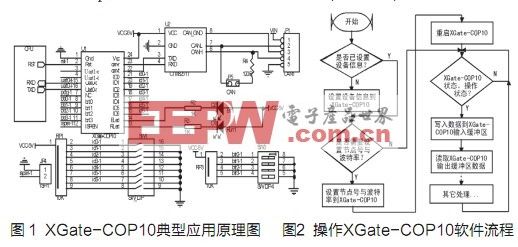
4.2 CANopen協議棧的軟件設計
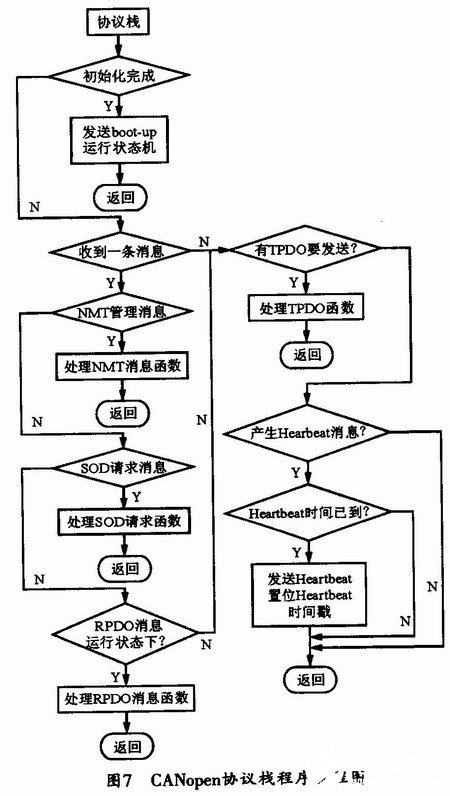
從節點中實現CANopen協議棧的軟件內容十分豐富,主要包括節點通訊初始化和硬件設備初始化、CAN報文基本通訊、定義和訪問對象字典、NMT從節點功能、PDO通訊、SDO通訊和節點保護等功能。其程序流程圖如圖7所示。
4.3 CANopen主站模塊的配置
在硬件連線接好之后,就可以通過TwidosoftV3.0或更高的CANopen配置工具來對CANopen現場總線主模塊進行配置。CANopen網絡的主、從配置以及通信參數的配置只能在離線模式下進行,而且除了某幾個參數可以調節(例如%IWC和%QWC PDO尋址參數)外,其他參數都不允許在線模式配置。
5 、結束語
實驗結果表明,本文所設計的CANopen通信系統可以達到較好的效果,可以實現現場設備層的鑄造電源系統參數的顯示、設定以及歷史記錄和報表打印等功能,同時,通過觸摸屏組態還可以完成對變頻電源A、B、C三相和輔助電源的集中管理和監控
責任編輯:gt
-
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
通信系統
+關注
關注
6文章
1187瀏覽量
53328 -
電磁感應
+關注
關注
17文章
824瀏覽量
58027
發布評論請先 登錄
相關推薦
三層交換機工作原理
LABVIEW實現網絡通信的方法
基于LABVIEW實現網絡通信的方法
怎么把CAN和以太網應用到電磁鑄軋生產系統?
基于UDP協議的網絡通信應用程序
通信網絡三層轉發工作原理及案例





 工商網監
工商網監
評論