 通過CY7C68013微控制器實現數據低速控制、高速傳輸的設計
通過CY7C68013微控制器實現數據低速控制、高速傳輸的設計
USB控制器是以USB串口引擎為主的專用集成電路,并可延伸至對其進行管理的MCU以及相應的軟硬件。目前市場上供應的USB控制器主要有2種:帶USB接口的單片機(MCU)或純粹的USB接口芯片。帶USB接口的單片機可分為2類:一類是從底層設計專用于USB控制的單片機,如Cypress公司的CY7C63513、CY7C64013等,由于開發工具的專用性,往往應用于各種專業應用場合,如微機主板等;另一類是增加了USB接口的普通單片機,如Intel公司的8X931、8X930以及Cypress公司的EZ-USB,由于均基于8051內核,因而得到了廣泛應用。
1、 CY7C68013與系統結構簡介
Cypress公司的CY7C68013芯片是集成USB2.0協議的微處理器,支持12 Mb/s的全速傳輸和480 Mb/s的高速傳輸,具有控制傳輸、中斷傳輸、塊傳輸和同步傳輸4種傳輸方式,內部包括一個增強型8051處理器內核、一個串行接口引擎(SIE)、一個USB收發器、8.5 KB片上RAM和4 KB FIFO存儲器以及一個通用可編程接口(GPIF)。8051可工作在48 MHz/24 MHz/12 MHz時鐘頻率,內部可自動產生480 MHz的頻率供USB2.0串行收發引擎使用。由于數據緩沖器與SIE相連接,數據進入收發器后,通過SIE可直接轉向FIFO,通過8 bit或16 bit數據接口與外設連接,存取數據。微控制器不參與數據傳輸,但允許以FIFO或RAM的方式訪問這些共享FIFO,從而實現低速控制、高速傳輸。CY7C68013有GPIF/SLAVE FIFO/GPIO 3種接口模式,本系統采用Slave FIFO接口模式,選用控制傳輸和塊傳輸2種方式,外部控制器可像普通FIFO一樣對FIFO進行讀寫。
本數據傳輸系統分為3部分:發送端和接收端、CY7C68013控制器、具有并/串(或串并轉換)功能的CPLD芯片(MAX7128)以及光纖傳輸模塊。其中,CY7C68013和MAX7128之間采用并行連接方式,MAX7128與激光發送(接收)模塊間是串行連接,如圖1(a)所示。
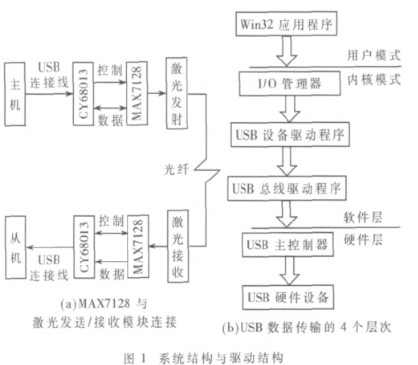
圖1(a)中,主機將數據發送到CY7C68013端點FIFO緩沖器中,然后CY7C68013將端點FIFO中的數據分字節放到一組I/O口上,并且使能讀信號,MAX7128讀取I/O上的邏輯值,當接收512 B后,MAX7128將這512 B的數據從低到高串行發送給激光發送模塊;數據經過光纖傳輸,進入激光接收模塊,輸出串行信號,通過MAX7128實現串并轉換,數據寬度為8 bit,通過CY7C68013的從屬FIFO的寫入時序即可將數據寫入CY7C68013的端點緩沖器中。
USB數據傳輸接口開發分為4個層次,接口硬件、接口軟件、驅動和應用程序如圖1(b)所示。
2、 固件程序設計
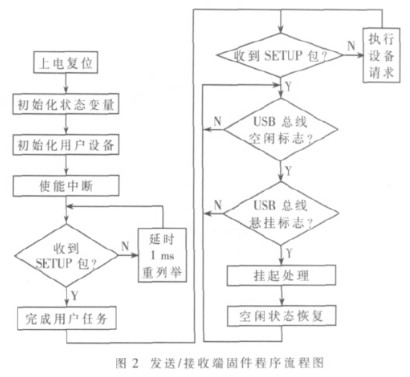
由于高速數據傳輸不需要固件程序參與,固件程序僅僅處理主機的發送請求。在發送端,固件將數據放置到I/O口上供MAX7128讀取;在接收端,MAX7128完成串并轉換后,將數據用特定時序寫入CY7C68013。此時只需設定寄存器,固件程序相對簡單,圖2為發送和接收固件程序流程。
CY7C68013芯片固件程序負責處理主(從)機發送來的各種請求,以完成與外圍電路間的各種數據傳輸。本系統固件一共包含九個程序文件,其中的頭文件分別定義了CY7C68013中的寄存器名和特殊功能寄存器、通用的CY7C68013常量、數據類型和宏、特殊功能寄存器所需要的同步延遲宏、用來描述CY7C68013狀態的各種USB描述符、INT2和INT4中斷跳轉表等。主函數負責處理標準USB請求和自定義請求,控制整個硬件系統的運行。接收端固件主循環不用做任何操作,與發送端程序流程圖完全相同。其固件運行的主程序清單如下,負責處理主機發出的各種USB請求。
……
TD_Init();//初始化用戶設備
EZUSB_IRQ_ENABLE();//使能USB中斷(INT2)
EZUSB_ENABLE_RSMIRQ();//使能喚醒中斷
INTSETUP |=(bmAV2EN | bmAV4EN);//使能INT2
//和INT4中斷跳轉向量
USBIE |=bmSUDAV | bmSUTOK | bmSUSP | bmURES |
bmHSGRANT;//使能所選擇的中斷
EA=1;//打開8051中斷
UsbDisconnect();
CKCON=(CKCON&(“bmSTRETCH)) | FW_STRETCH_
VALUE;//設為0值
Sleep=FALSE;//清除sleep標志
while(TRUE)//主循環
{
if(GotSUD)//等待SETUP令牌數據的到來
{
ParseControlTransfer();//處理SETUP令牌數據
GotSUD=FALSE;//清除SUDAV標志
}
if (Sleep)
{
Sleep=FALSE;//清除sleep標志
do
{
EZUSB_Susp();//置8051為空閑
}
while(!Rwuen&&EZUSB_EXTWAKEUP());
EZUSB_Resume();//從空閑狀態恢復
}
TD_Poll();//完成用戶任務
}
……
需要強調的是:固件程序設計完成后需要進行調試,確保系統硬件正常工作。
(1)工作時鐘頻率的確定:晶振兩引腳對地電壓均為1.6 V左右,此時CLKOUT引腳默認輸出為24 MHz,當輸出48 MHz時,電壓為2.5 V。
(2)電平觸發中斷方式:中斷后一定要讀上次傳輸狀態寄存器(命令40 H”45 H),以清除中斷寄存器中的中斷標志,這樣中斷輸出才能變回高電平。
(3)使能端口:接收到Setup包后,必須用ACKsetup命令重新使能端口為低電平。
(4)緩沖區數據標志:在向IN端點寫完數據后,必須設置EP2BCH指明緩沖區中的數據有效,示意可以發送到主機。當IN端點的數據被外設讀走后,一定要調用OUTPKTEND來清除緩沖區數據,否則無法向IN端點寫入數據。在USB設備枚舉的過程中,可采用USB調試工具BusHound軟件來抓取它和主機的通信數據進行分析,以檢查硬件和固件程序的工作是否正確。
3 、驅動程序設計
為了配合CY7C68013的工作,需要有驅動程序以使上位機程序能正常訪問USB芯片。以Cypress公司提供的參考程序為基礎,增加自定義控制請求即可。
由于驅動程序必須和系統的總線驅動進行通信,系統總線驅動為WDM(Win32 Driver Model)驅動。因此,USB驅動程序采用WDM設備驅動程序。由于USB總線驅動程序(USBD)一般由操作系統提供,負責與實際的硬件打交道,因此,重點是開發USB設備驅動程序(USB Device Driver)。USB設備的WDM驅動程序是通過創建URB(USB請求塊),并向USB總線驅動程序發送包含URB的IRP來實現對USB設備信息的發送和接收。此外,USB設備驅動程序除負責處理應用程序的I/O請求外,還要處理PnP請求。
CY7C68013的驅動程序包括2部分:usbfft.sys,專用于下載芯片的固件程序;loaderfft.sys,上位機和CY7-C68013進行通訊的部分,用于實現數據收發功能。這2個部分都存放在上位機上,當系統上電或USB連接時,固件部分將自動下載到芯片的RAM中供8051執行。
4、 應用程序設計
上位機是人機交互的平臺,需要良好的操作界面。本系統通過VB6.0開發了上位機應用程序,運行界面如圖3所示。
應用程序是完成數據發送與接收并且對系統進行有效控制的平臺,不僅需要向CY7C68013發送數據,還需要將接收的數據顯示出來并保存。此外為了系統測試的方便,增加了誤碼率和速率測試模塊,以測試系統的整體性能。
本系統上位機的主要功能有:(1)文件的發送;(2)文件的接收;(3)速率測試;(4)誤碼率測試;(5)系統控制,用來獲取CY7C68013描述符以及其內部寄存器的情況,并對整個系統進行控制,如使能CY7C68013的數據輸出功能及片內數據轉移功能等。
系統中定義了6個時間控件來完成數據的發送與接收,timer1、timer3和timer4分別完成文件、誤碼率及速率測試的發送,Timer2、timer6和timer8分別完成文件、誤碼率及速率測試的接收。另外定義了一個時間控件來控制開啟哪一個接收數據時間控件。為了保證有效判斷所接收到的數據是文件、速率測試還是誤碼率測試數據,在timer1、timer3和timer4發送前都先發送一個512 B的前導包。全為1時表示下一個數據包包含著速率測試數據,全為2時表示下一個數據包包含著誤碼率測試數據,全為3時表示下一個數據包包含著文件數據。這樣就能判斷出應該開啟哪一個接收時鐘。
具體的文件數據處理方法是:文件打開后,先將文件緩沖,定義一個二維數組:行512 B,列由文件大小決定。數組的第一個512 B前20 B記錄所發送文件的大小,并且在最開始的5 B以0xAA填充,表明這個數據包是全部文件的開始,當文件大小不足填滿最后的512 B時,數據補0,但數組結尾為0xAA。
采用CY7C68013設計的高速數據傳輸系統,經過測試,達到了設計要求,實現了數據的高速傳輸,為下一步開展數據編碼/譯碼、調制/解調研究打下了良好的基礎。
責任編輯:gt
-
微控制器
+關注
關注
48文章
7542瀏覽量
151316 -
集成電路
+關注
關注
5387文章
11530瀏覽量
361632 -
usb
+關注
關注
60文章
7936瀏覽量
264475
發布評論請先 登錄
相關推薦
USB2.0控制器CY7C68013芯片與FPGA芯片接口的Verilog HDL實現
怎么實現USB2.0微控制器CY7C68013的GPIF接口設計?

USB2.0控制器CY7C68013特點與應用
基于CY7C68013的USB數據采集系統
USB2.0控制器CY7C68013特點與應用
USB2.0控制器CY7C68013的接口設計實現
基于CY7C68013的CCD圖像傳輸系統

基于USB2.0芯片CY7C68013的高速數據通信接口設計
USB2.0微控制器CY7C68013的GPIF接口設計資料下載






 工商網監
工商網監
評論