


入住頭條有1年多了,第一次發文。我是一只在無人機領域的嵌入式工程獅,看了頭條上很多的對PID解說的專業文章,幾乎都是從控制上切入的,這里我從不同的角度來分析PID。
先說結論:PID的本質是跟隨器,用于跟蹤給定信號。
很多朋友在這里又會發問了,PID不是控制器嗎?在某權威百科上面的解釋就是:比例(P)積分(I)微分(D)控制,簡稱PID控制。這是沒錯的,PID算法從100年前開始出現,就開始廣泛的用于工業控制,PID的起源就是用于做控制器。看起來PID和控制是分不開的,實則不然。
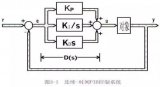
從PID的公式也可以看出,e是目標量和輸出量的偏差,當誤差e趨近0時,輸出u將收斂到一個固定值。最終PID實現的效果就是將目標量和輸出量兩者的偏差歸零,當目標量變化時,輸出量也會跟隨著目標量變化,也就是說輸出量通過PID來跟隨目標量。
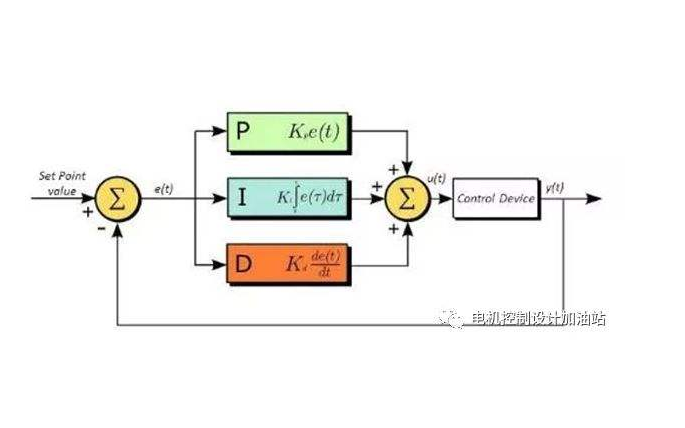
下面我從兩個例子來說明PID分別作為控制器使用和信號跟隨器的使用。
PID作為控制器——水箱液位控制
這里水箱的液位我們假設沒有延遲,設計一個PID控制器來控制液位,誤差e為目標液位和輸出量為液位之差。u為執行器輸出,這里是閥門開度,大于0為注水,小于0為放水。具體代碼不在此贅述。
剛開始的時候,把液位設置到5米,2秒后實際液位基本到達5米。在50s的時候,把目標液位設置為2米,液位下降,2秒后穩定到2米。說明PID完成了它原始的使命——作為控制器使用。
PID作為信號跟隨器——傾角傳感器的設計
這里傾角傳感器的設計就不涉及到任何控制了。我們的目標是測量角度,硬件選用加速度計和陀螺儀構成。為了方便,我們只測量單軸角度,這里用2軸微電子加速度計和1軸微電子陀螺儀。
陀螺儀的輸出量是角速度,角速度積分就是角度,這不是用陀螺儀就能解決了嗎?為什么還要加速度計呢?是因為陀螺儀輸出的角速度包含有各種噪聲,積分得到的角度會隨著時間誤差越來越大。具體的可以看下面的圖像分析。
上面左圖是以1度/秒的角速度運動10秒,右圖在角速度1度/秒的基礎上加了±0.5度/秒的隨機噪聲,可以發現在10秒后角度值為106度(圖可能看不清),這是因為角度值的獲取是通過角速度積分得到的,存在累計誤差。而加速度計具備良好的穩定性,測量的偏移也很小,最重要的是它測量的角度沒有累計誤差。
θacc是加速度計測量的傾角。定義當測量角為0時,az沿著重力方向豎直向下,和重力加速度的關系是az=g*cos(θacc),ax垂直于az,和重力加速度的關系是az=g*sin(θacc)。這就是加速度計測量傾角的原理。
那既然加速度計沒有累計誤差,測量比陀螺儀更好,用加速度計就夠了嘛,為什么一定要用陀螺儀呢?因為加速度計測量的物理量是比力,而非加速度,加速度是通過比力計算得到的。加速度計不能分辨出是地球引力還是運動外力。所以在被測量物體運動的時候將無法得到準確的傾角。這個時候陀螺儀就起作用了,因為陀螺儀對運動加速度不敏感。
陀螺儀短時間內計算的角度很準確,但時間長了會產生累計誤差,加速度計長時間內的穩定彌補了陀螺儀的短缺。加速度計在運動的情況下測量有誤差,陀螺儀對運動不敏感。
所以可以用兩者的互補關系,來設計一個傾角傳感器。那這里面怎么用到PID的性質呢?
我們把加速度求得的角度θacc作為目標量,我們把陀螺儀積分角度θgyro作為輸出量。讓陀螺儀角度跟隨著加速度角度。設計PI跟隨器,調節參數,讓陀螺儀積分角度θgyro慢慢跟隨加速度計算的角度θacc。下圖是計算周期為50ms時,kp=0.2,ki=0.005時的效果圖像。角速度噪聲±0.5度/秒。加速度受到運動的影響,角度噪聲為±2度。
在0秒時以角速度10度/秒運動2秒,在2秒時角速度以-10度/秒運動4秒。下面是6s到10s的放大圖。
真實角度(藍色)為-21度,陀螺儀積分角度(紫色)漂移了2度左右,加速度計計算角度(綠)噪聲為±2度,組合角度(紅,即陀螺儀積分角度跟隨加速度計計算角度的結果)保持在真實角度附近,誤差不到1度,說明PID完成了它的本質工作——作為信號跟隨器使用。
-
傳感器
+關注
關注
2567文章
53068瀏覽量
768142 -
陀螺儀
+關注
關注
44文章
850瀏覽量
100069 -
PID
+關注
關注
37文章
1482瀏覽量
88195
發布評論請先 登錄
詳細分析stm32f10x.h
詳細分析了VTIM和VMIN的功能
PID到底是什么

PID調節到底是什么?PID調節和PID控制原理的詳細資料說明
徹底搞懂PID到底是啥
PID到底是什么





 工商網監
工商網監

評論