

如今掃地機器人越來越受歡迎,越多越多的家庭想購入一臺掃地機器人,掃地機器人儼然已經(jīng)成為一類“新興小家電”。為了效率更高、更節(jié)能地實現(xiàn)清掃全屋,掃地機器人的導(dǎo)航系統(tǒng)是必不可少的功能。所以,掃地機器人制造商會耗費大量精力為掃地機器人準(zhǔn)備一雙“金睛火眼”,讓掃地機器人“看”到世界,根據(jù)“眼”中世界去規(guī)劃路徑。
掃地機器人的導(dǎo)航系統(tǒng)是必不可少的功能。所以,掃地機器人制造商會耗費大量精力為掃地機器人準(zhǔn)備一雙“金睛火眼”,讓掃地機器人“看”到世界,根據(jù)“眼”中世界去規(guī)劃路徑。
就目前而言,市場上使用較為廣泛的掃地機器人導(dǎo)航技術(shù)有兩種,一種是激光導(dǎo)航,另一種是視覺導(dǎo)航,那么到底哪種更好呢?
激光導(dǎo)航:
搭載激光導(dǎo)航的掃地機器人如米家LDS掃拖機器人等,是通過LDS激光雷達(dá)掃描來判斷自己的位置。通過高速旋轉(zhuǎn)發(fā)射激光,再通過激光發(fā)射后觸及障礙物反射回來的時間判斷自己和障礙物之間的距離,從而判斷相對位置,實現(xiàn)定位。
這種導(dǎo)航方式的優(yōu)點是定位精度高,即使是無光環(huán)境也能精準(zhǔn)定位,激光導(dǎo)航憑借其精準(zhǔn)定位的優(yōu)勢,占據(jù)了掃地機器人導(dǎo)航產(chǎn)品大部分的市場份額。但它也有明顯的缺點,其主要傳感器多位于掃地機器人頂部,可視角度在垂直方向都很小,無法實現(xiàn)大范圍障礙物檢測。對于低于或略高于(高于機身,但會碰到激光雷達(dá)傳感器)機身的障礙物,例如柜底邊緣、近地處的電線等,掃地機器人避障效果欠佳。因此,掃地機被柜底卡住、被線體纏繞等問題時有發(fā)生。
視覺導(dǎo)航:
搭載視覺導(dǎo)航的掃地機器人如科沃斯DJ65等,是采用單目方案的視覺導(dǎo)航來實現(xiàn)定位的。此款掃地機器人的視覺傳感器安裝在頂部,通過復(fù)雜的算法讓機器人能夠通過感知由亮度不同的光點組成的光學(xué)圖像來進(jìn)行定位。這些光學(xué)影像從不同的角度看起來是各不相同的,通過不斷收集這些圖像信息,機器人可以在自身構(gòu)建的地圖上進(jìn)行定位,從而知道哪些位置已經(jīng)掃過、哪些地方需要清潔。
視覺導(dǎo)航的優(yōu)點是成本低,適用性強,借助大數(shù)據(jù)就能夠解決技術(shù)路線。但是視覺導(dǎo)航掃地機的問題也很明顯,視覺測距的前提是精準(zhǔn),在攝像頭獲取環(huán)境信息后要快速計算出距離,期間若是數(shù)據(jù)處理和算法跟不上,距離數(shù)據(jù)就會形成偏差。
因此,從技術(shù)實現(xiàn)的角度來說,視覺導(dǎo)航比激光導(dǎo)航無疑要難很多。正因如此,市場上很少有完全采用視覺導(dǎo)航系統(tǒng)的掃地機器人,更多的是激光導(dǎo)航+視覺傳感器或其他傳感器的融合方案。
從未來發(fā)展角度而言,目前無論行業(yè)發(fā)展還是產(chǎn)品用戶體驗,視覺導(dǎo)航的潛力是毋庸質(zhì)疑的。除了科沃斯、iRobot等掃地機器人行業(yè)頭雁外,國內(nèi)還有很多優(yōu)秀企業(yè)在視覺導(dǎo)航領(lǐng)域不斷“攻克”難題。如國內(nèi)立體視覺方案提供商INDEMIND便推出了面向掃地機器人的視覺導(dǎo)航定位解決方案。
據(jù)了解,INDEMIND視覺導(dǎo)航解決方案是采用雙目立體視覺架構(gòu),且方案成熟度較高,并與業(yè)內(nèi)諸多企業(yè)建立合作。該方案通過立體視覺技術(shù)與高精度Vi-SLAM算法,將本應(yīng)涉及超長產(chǎn)業(yè)鏈的掃地機定位、交互問題集中到一套解決方案中,快速為客戶相關(guān)產(chǎn)品提供高精度的導(dǎo)航定位、路徑規(guī)劃、智能避障、目標(biāo)跟隨、家居識別等核心功能。值得一提的是,該方案的導(dǎo)航精度已實現(xiàn)絕對定位精度<1%,姿態(tài)精度<1°的領(lǐng)先水平,足以媲美激光雷達(dá)。
此外,由于視覺方案的天然優(yōu)勢,INDEMIND視覺導(dǎo)航定位解決方案可將掃地機器人的導(dǎo)航定位成本控制在百元級,極大降低了廠商的研發(fā)、生產(chǎn)成本。
總的來說,與激光雷達(dá)方案相比,視覺導(dǎo)航是一個維度更高、成本更低、適用性更強的掃地機器人導(dǎo)航定位方案。未來,隨著算力的提升,算力成本的降低,視覺導(dǎo)航方案的成本可以進(jìn)一步下探;伴隨研究的深入,視覺導(dǎo)航所帶來的環(huán)境語義功能日趨完善,智能掃地機器人會變得更加可視化,更加聰明,價格也更加親民。lw
-
視覺導(dǎo)航
+關(guān)注
關(guān)注
0文章
31瀏覽量
8140 -
掃地機器人
+關(guān)注
關(guān)注
21文章
809瀏覽量
54341 -
激光導(dǎo)航
+關(guān)注
關(guān)注
0文章
48瀏覽量
5819
發(fā)布評論請先 登錄
鈞敏科技AM2355驅(qū)動芯片在掃地機器人中的應(yīng)用
恩智浦i.MX RT1052跨界MCU在掃地機器人中的應(yīng)用

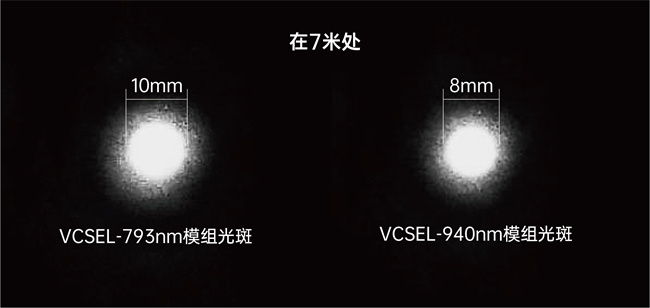
瑞識科技掃地機雷達(dá)導(dǎo)航用VCSEL模組出貨突破千萬顆
智能掃地機器人的工作原理和構(gòu)成
淺談掃地機器人用到的那些電子元器件!
大疆或明年中期推出高端掃地機器人
掃地機器人廠商iRobot將裁員16%
霍爾開關(guān)在掃地機器人中的應(yīng)用
掃地機器人的核心技術(shù)突破
愛普生SGPM01助力智能泳池清潔機器人導(dǎo)航方案
掃地機器人避障技術(shù)的發(fā)展史
供應(yīng) 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標(biāo)準(zhǔn)詳解及試驗方法

光耦知識分享‖探討光耦技術(shù)在掃地機器人的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論