") 采用極點(diǎn)配置法實(shí)現(xiàn)倒立擺系統(tǒng)的設(shè)計(jì)
采用極點(diǎn)配置法實(shí)現(xiàn)倒立擺系統(tǒng)的設(shè)計(jì)
1 引言
倒立擺是研究控制理論的典型實(shí)驗(yàn)平臺。由于倒立擺系統(tǒng)本身所具有的高階次、不穩(wěn)定、多變量、非線性和強(qiáng)耦合特性,許多現(xiàn)代控制理論的研究人員一直將它視為典型的研究對象,不斷從中發(fā)掘出新的控制策略和控制方法。控制器的設(shè)計(jì)是倒立擺系統(tǒng)的核心內(nèi)容,因?yàn)榈沽[是一個(gè)絕對不穩(wěn)定的系統(tǒng),為使其保持穩(wěn)定,并且可以承受一定的干擾,采用極點(diǎn)配置法設(shè)計(jì)用于直線型一級倒立擺系統(tǒng)的控制器。
2 數(shù)學(xué)模型的建立
因?yàn)榈沽[系統(tǒng)本身是一個(gè)自不穩(wěn)定的系統(tǒng),因此實(shí)驗(yàn)建模存在一定的困難。然而,經(jīng)過謹(jǐn)慎的假設(shè),忽略掉一些次要因素,就能使倒立擺系統(tǒng)成為一個(gè)典型的運(yùn)動的剛體系統(tǒng),使之在慣性坐標(biāo)系內(nèi)應(yīng)用經(jīng)典力學(xué)理論就能建立系統(tǒng)的動力學(xué)方程。下面采用牛頓一歐拉方法建立直線型一級倒立擺系統(tǒng)的數(shù)學(xué)模型。
2.1 微分方程的推導(dǎo)
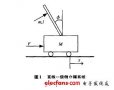
在忽略空氣阻力和各種摩擦后,可將直線一級倒立擺系統(tǒng)抽象成小車和勻質(zhì)桿組成的系統(tǒng),如圖l所示。
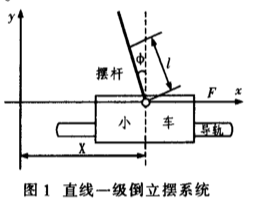
假設(shè)M為小車質(zhì)量;m為擺桿質(zhì)量;b為小車摩擦系數(shù);
l為擺桿轉(zhuǎn)動軸心到桿質(zhì)心的長度;I為擺桿慣量:F為加在小車上的力;x為小車位置;φ為擺桿與垂直向上方向的夾角;
θ擺桿與垂直向下方向的夾角圖2示出系統(tǒng)中小車和擺桿的受力分析圖。其中,N和P為小車與擺桿相互作用力的水平和垂直方向分量腳。值得注意的是:在實(shí)際倒立擺系統(tǒng)中檢測和執(zhí)行裝置的正負(fù)方向已確定,因而矢量方向定義如圖2所示,圖示方向?yàn)槭噶空较颉?/p>
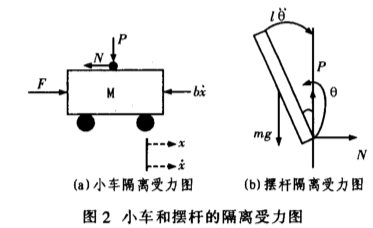
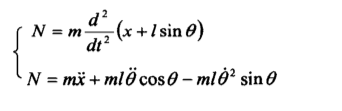
分析小車水平方向所受的合力,可得方程為:
MX=F—bi—N
由擺桿水平方向的受力進(jìn)行分析,可得:
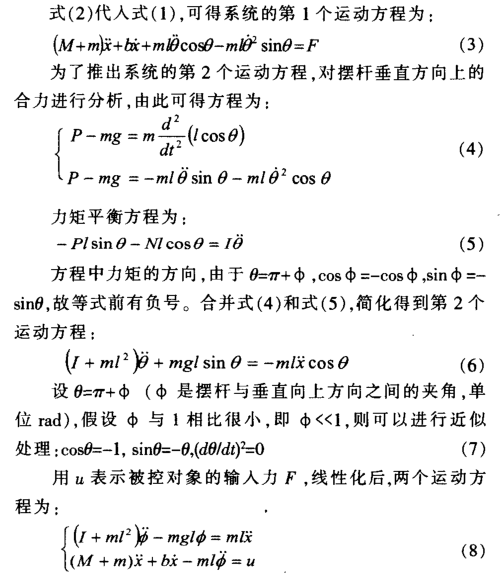
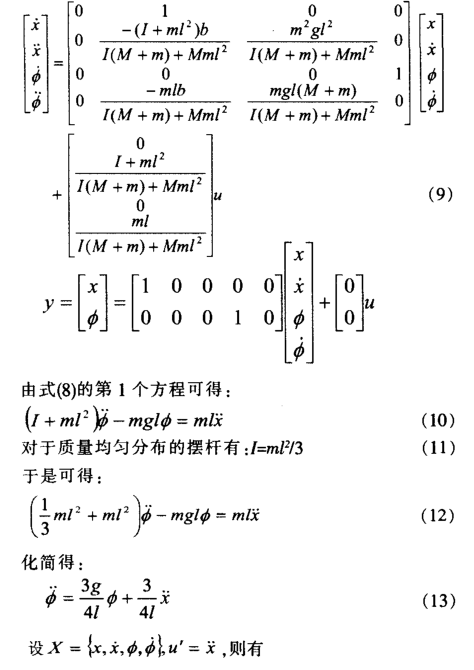
2.2 狀態(tài)空間方程
由方程組(8)對x,φ解代數(shù)方程,整理后得:
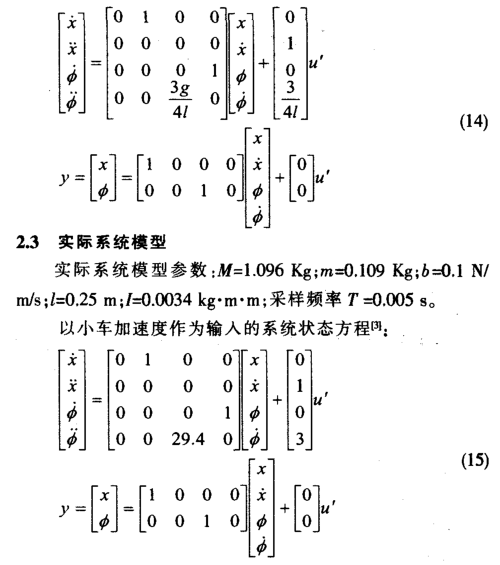
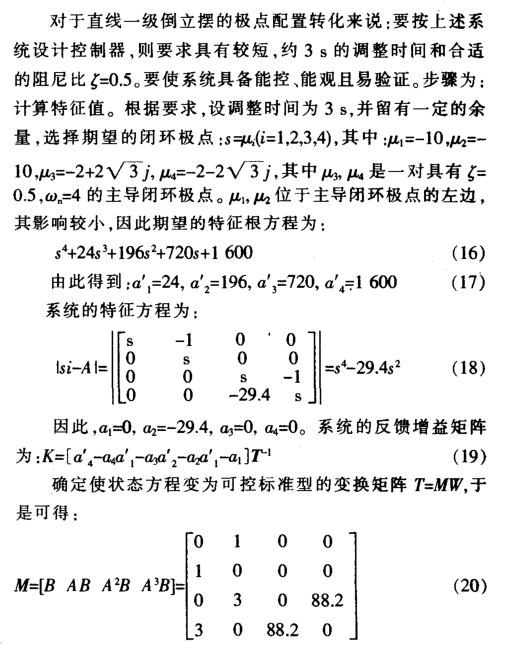
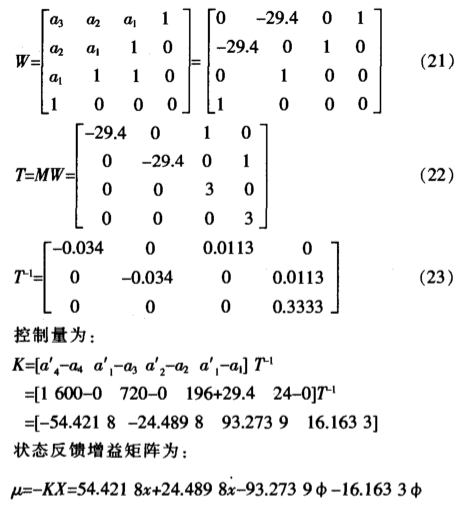
3、 狀態(tài)空間極點(diǎn)配置
4 、仿真驗(yàn)證
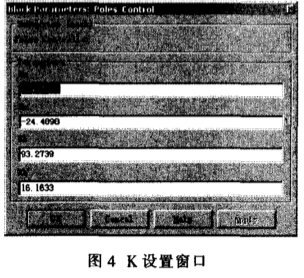
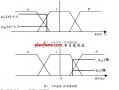
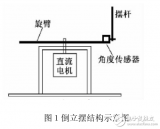
建立直線一級倒立擺的仿真模型如圖3所示。“GLlIPState—Space”為直線一級倒立擺的狀態(tài)空間模型。雙擊圖3中的“Poles Control”模塊,打開圖4中的設(shè)置窗口。
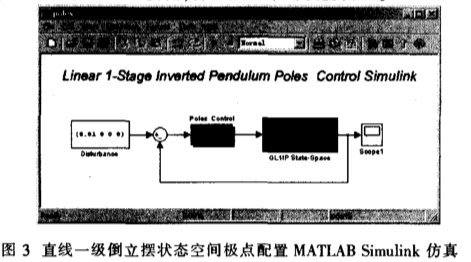
把計(jì)算得到的K值輸入到上面的窗口。可得圖4所示的仿真運(yùn)行結(jié)果。
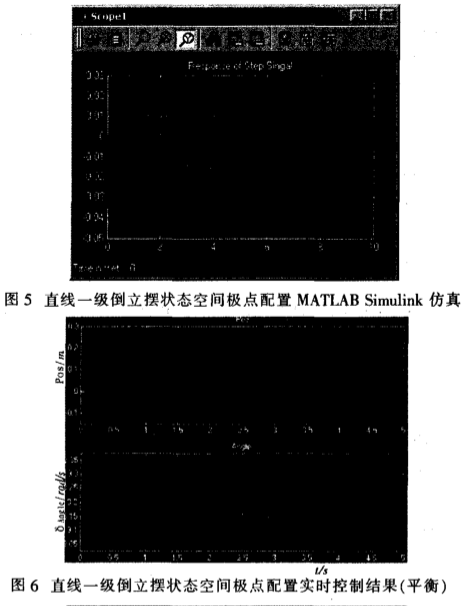
由圖5可見,在存在干擾的情況下,系統(tǒng)在3 s內(nèi)基本上可以恢復(fù)到新的平衡位置。
5、 實(shí)時(shí)控制
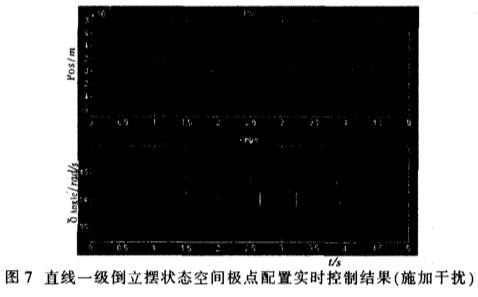
將仿真得到的K參數(shù)輸入到實(shí)際系統(tǒng)的控制模塊中,可得圖6所示實(shí)時(shí)控制曲線。在給定倒立擺干擾后,系統(tǒng)響應(yīng)圖7所示。
6、 結(jié)語
采用極點(diǎn)配置法設(shè)計(jì)的用于直線型一級倒立擺系統(tǒng)的控制器,可使系統(tǒng)在很小的振動范圍內(nèi)保持平衡,小車振動幅值約為4×10-3m,擺桿振動幅值約0.05 rad,系統(tǒng)穩(wěn)定時(shí)間約3 s。
責(zé)任編輯:gt
-
仿真
+關(guān)注
關(guān)注
50文章
4155瀏覽量
134486 -
計(jì)算
+關(guān)注
關(guān)注
2文章
452瀏覽量
38955
發(fā)布評論請先 登錄
相關(guān)推薦
【IntoRobot Neutron試用體驗(yàn)】使用Neutron實(shí)現(xiàn)倒立擺的初步倒立
關(guān)于倒立擺的問題描述
基于單片機(jī)實(shí)現(xiàn)對二級倒立擺的控制
基于狀態(tài)反饋控制的倒立擺系統(tǒng)分析和設(shè)計(jì)
環(huán)形倒立擺
倒立擺的非線性穩(wěn)定控制實(shí)現(xiàn)

智能控制在倒立擺控制系統(tǒng)中的應(yīng)用
倒立擺系統(tǒng)的自擺起和穩(wěn)定控制
倒立擺系統(tǒng)的智能控制算法研究

簡易環(huán)形倒立擺控制系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)
倒立擺控制系統(tǒng)的原理及其應(yīng)用介紹
倒立擺是什么_倒立擺有什么用
采用16位結(jié)構(gòu)的微控制器實(shí)現(xiàn)二級倒立擺系統(tǒng)的設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論