 帶你來剖析機器人的坐標系吧!
帶你來剖析機器人的坐標系吧!
機器人的坐標系,你知道多少 ?真的會使用坐標系嗎?下面我來帶你來剖析機器人的坐標系吧!(以ABB機器人舉例說明)
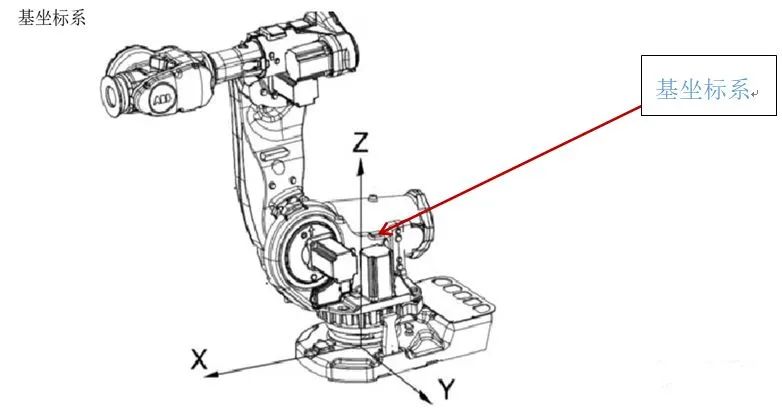
1. 基坐標系
基坐標系是以機器人安裝基座為基
準、用來描述機器人本體運動的直角坐標系。
任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
坐標系遵守右手準則:
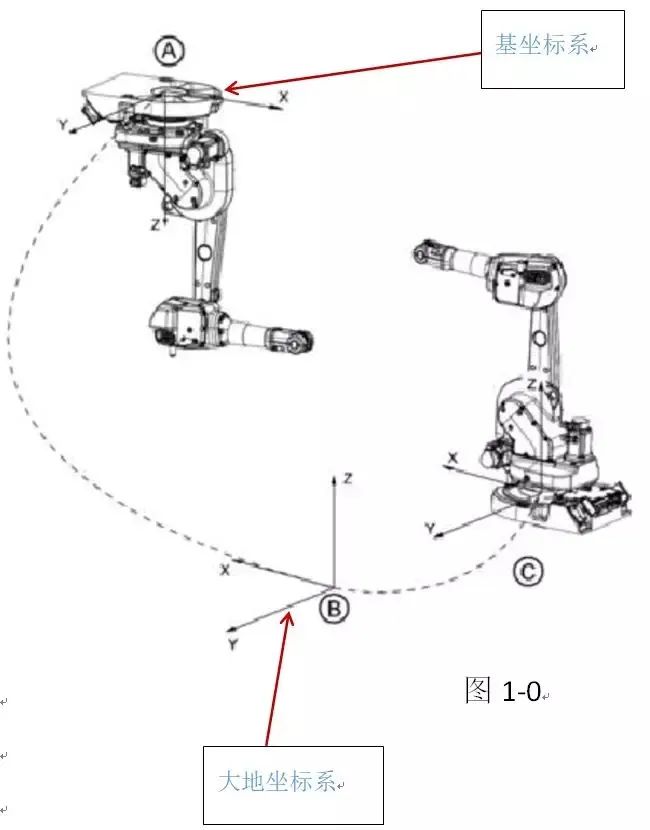
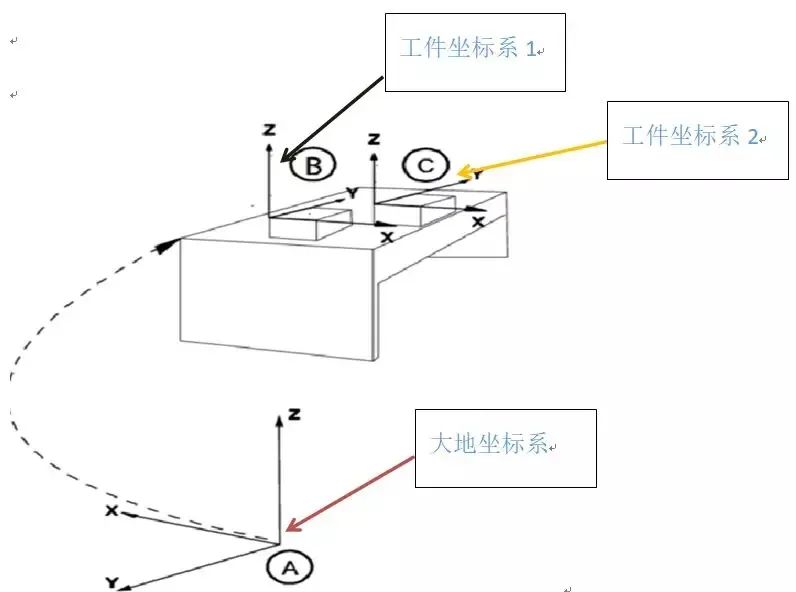
2. 大地坐標系
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合:
(1)機器人倒裝。
如圖1-0,倒裝機器人的基坐標與大地坐標Z軸的方向是相反,機器人可以倒過來,但是大地卻不可以倒過來。
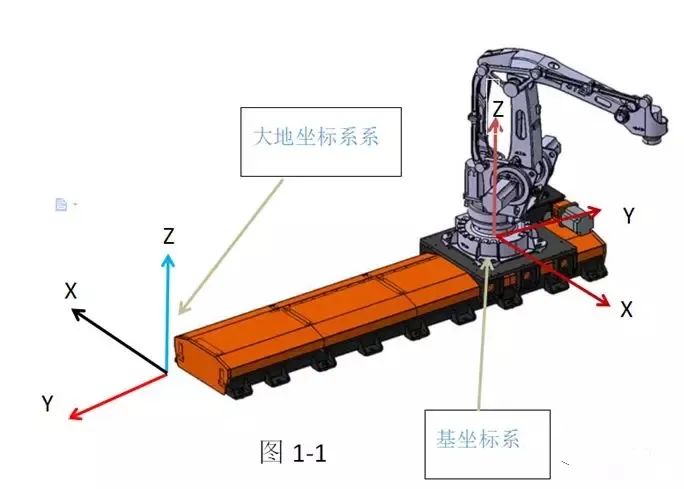
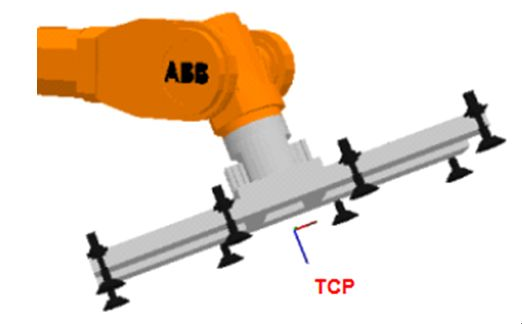
(2)帶外部軸的機器人。如圖1-1,大地坐標系固定好位置,而基坐標系卻可以隨著機器人整體的移動而移動。
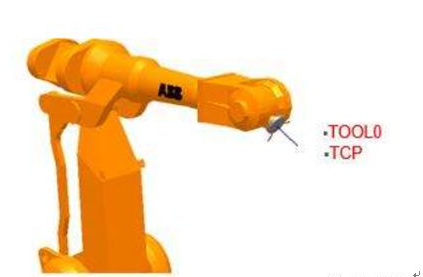
3. 工具坐標系
工具坐標系:是以工具中心點作為零點,機器人的軌跡參照工具中心點,不再是機器人手腕中心點Tool0(如圖1-2)了,而是新的工具中心點(如圖1-3)。
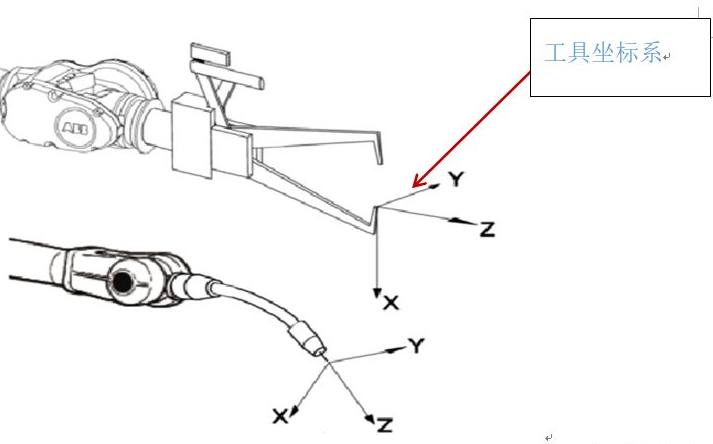
例如:焊接的時候,我們所使用的工具是焊槍,所以可把工具坐標移植為焊槍的頂點。而用吸盤吸工件時使用的是吸盤,所以我們可以把工具坐標移植為吸盤的表面(如圖1-5)。
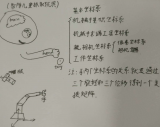
4. 工件坐標系
工件坐標系:工件坐標系是以工件為基準的直角坐標系,可用來描述TCP運動的坐標系。
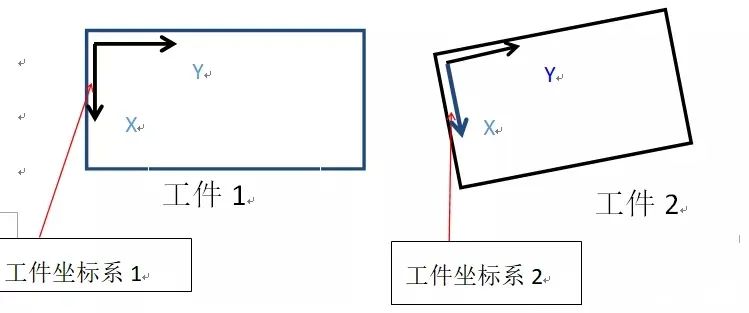
充分利用工件坐標系能讓我們編程達到事半功倍的效果。
例如:機器人加工工件1,軌跡編程已經編好,另外有工件2,軌跡不需要重復編程只要把工件坐標系1改為工件坐標系2即可。
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
三維空間
+關注
關注
0文章
17瀏覽量
7482
原文標題:機器人4大坐標系講解,別在搞混了!
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
深度剖析:MT6816 磁編碼 IC 在機器人焊接變位機中的應用
abb機器人工具坐標系問題
Al大模型機器人
abb機器人常用指令大全
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
GNSS仿真測試之三種常用坐標系與轉換
2024機器人賽道強勢開局 多家上市公司布局機器人領域
arcmap如何設置地理坐標系
應用衛星通信領域的一個坐標轉換過程—機體坐標系與ENU坐標系的轉換






 工商網監
工商網監
評論