") KUKA機器人電伺服焊鉗力的建立過程
KUKA機器人電伺服焊鉗力的建立過程
KUKA機器人組態(tài)電伺服焊鉗,使用軟件插件 "SERVOGUN.BASIC"
電機驅(qū)動簡圖:
X型焊鉗
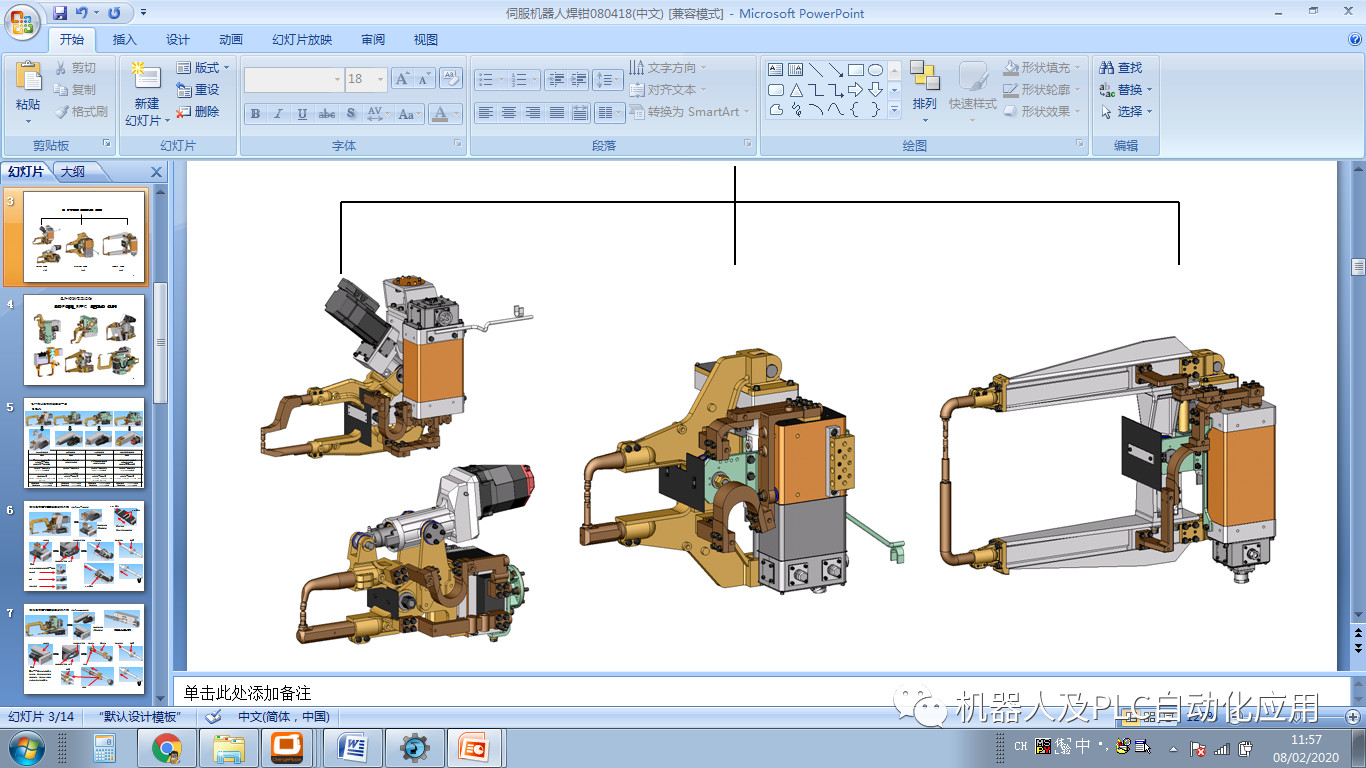
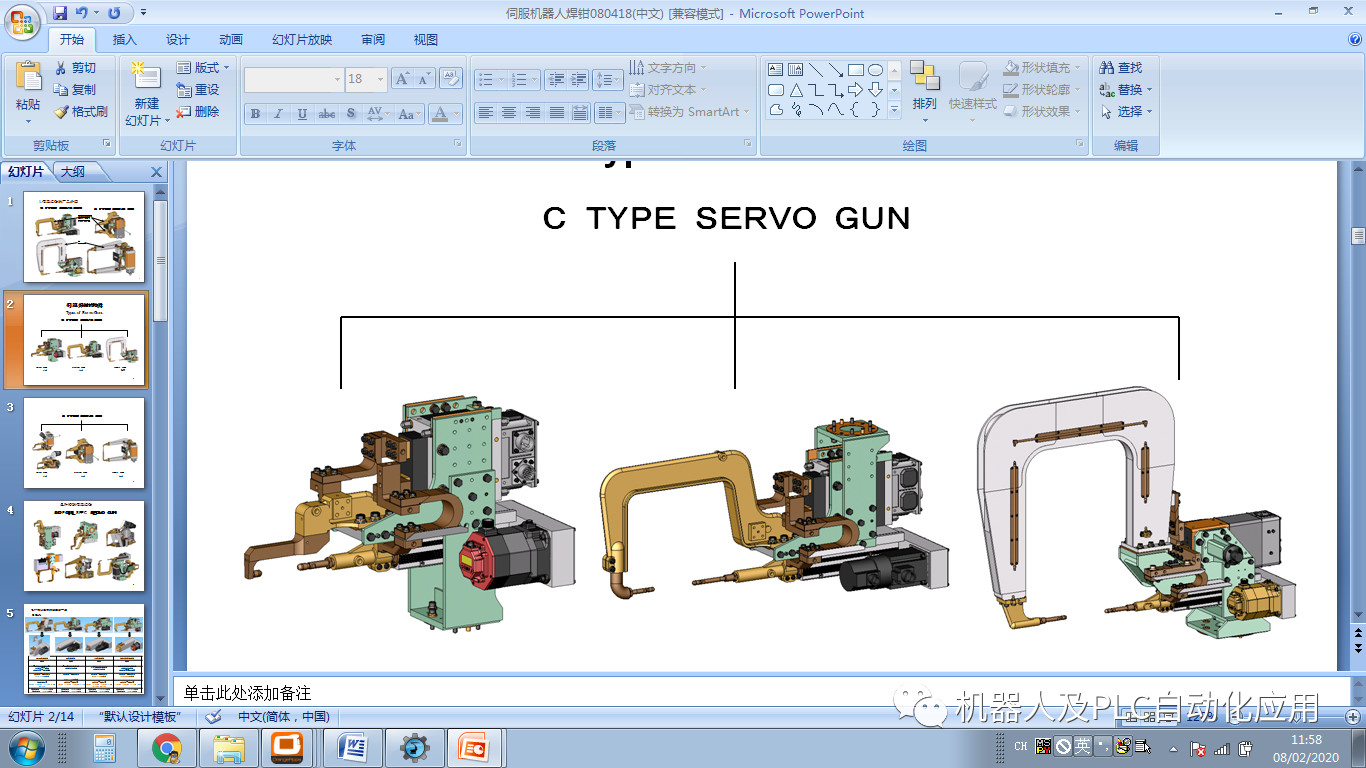
C型焊鉗
KUKA機器人常用控制變量:
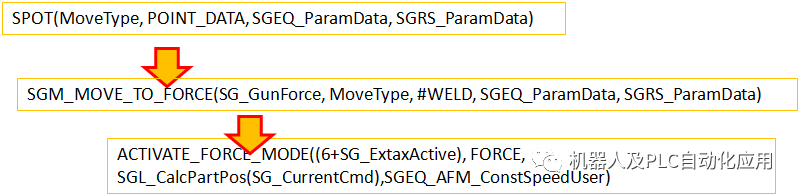
KUKA機器人控制力函數(shù):
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)

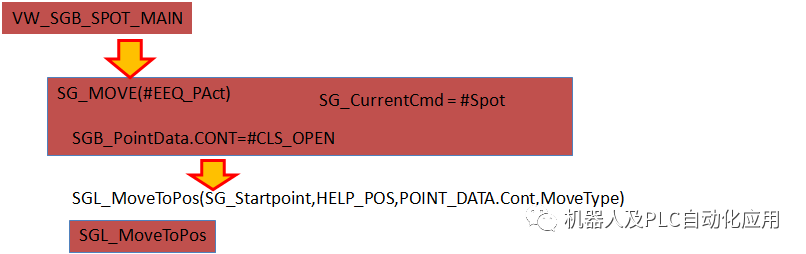
力的建立確定過程:
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P ;焊接點
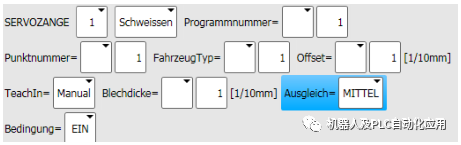
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnummer= 5154 FahrzeugTyp= 60 Offset= 1[1/10mm] TeachIn= Auto Ausgleich= MITTEL Bedingung=EINUSER焊接程序
VW_SGB_SPOT_MAIN(TRUE,#SG_PTP,P10,1,99,5154,60,1,TRUE,0,ServoGun[1].CompType,#MEDIUM,0,0,0)執(zhí)行后臺焊接程序
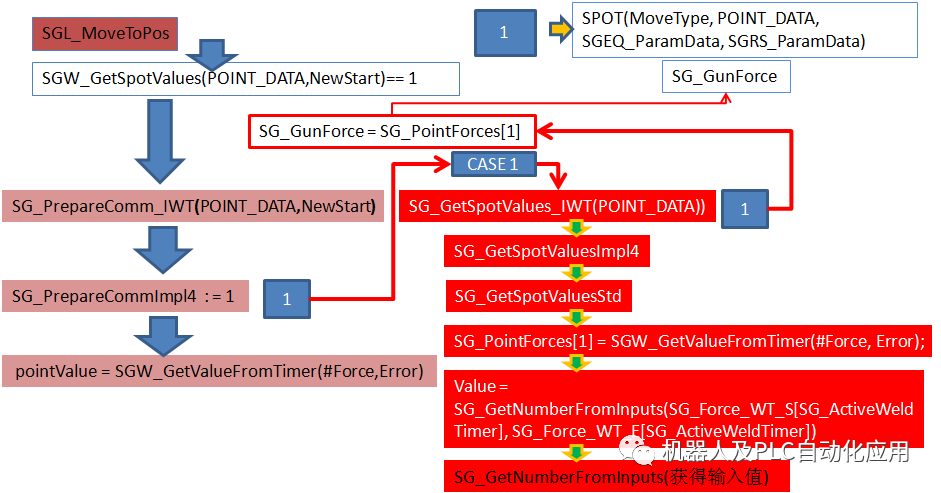
機器人的焊接控制器的通訊連接力的輸入點
SG_Force_WT_S[1]=793起始字節(jié)
SG_Force_WT_E[1]=800結(jié)束字節(jié)
SG_GunForce= SG_PointForces[1]傳遞力值
將工作力值給入系統(tǒng)函數(shù)'ACTIVATE_FORCE_MODE'中實現(xiàn)力的控制
-
機器人
+關(guān)注
關(guān)注
211文章
28466瀏覽量
207312 -
焊接
+關(guān)注
關(guān)注
38文章
3142瀏覽量
59832 -
伺服
+關(guān)注
關(guān)注
16文章
651瀏覽量
40984
原文標題:KUKA 機器人電伺服焊鉗力的建立過程
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
開源項目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動作的機器人—Tillu
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
伺服電機在機器人中的應(yīng)用有哪些
智能升級:機器人焊鉗修磨機VS傳統(tǒng)修磨機,效率與質(zhì)量的雙重飛躍
國產(chǎn)可編程硅振在機器人伺服系統(tǒng)中的應(yīng)用,替換SiTime

伺服控制機器人的控制方式有哪些
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
六維力傳感器——人形機器人的力覺

工業(yè)機器人仿真軟件有哪些
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論