

功能:--力矩報警--
例:
TECH2_ Koll_Ueb Betriebsart =Lernen Stop Bereich = 1 Offset = 5 EIN
------------
VW_USR_R (#USR_ADV,204,1,2,1,5,1,2,TRUE)
P1=1 P1=1 測量力矩 P1=2 -激活使用力矩監(jiān)控
P2=2改變個軸的力矩范圍
P3=1使用的數(shù)組
P4=5偏差補償值
P5=1
P6=2
P7=TRUE
ADC : 預先執(zhí)行
CASE 204
IF(PAR7==TRUE)THEN
WHILE((PAR4<1) OR (PAR4>40)) --檢查P4的補償值-是否在(1-40)之間
MLD(29,#QuitMsg);
ENDWHILE
ENDIF
MAIN: 到達位置后停止
CASE 204 ;
Index=PAR3-P3=1使用的數(shù)組
KOLL_DAT[1]={A1 8,A2 19,A315,A4 9,A5 12,A6 13}
IF(PAR7==TRUE)THEN
WHILE(PAR2<1) OR (PAR2>2) -檢查P2值得設置范圍
MLD(30,#QuitMsg)
ENDWHILE
;
SWITCH PAR1 -P1=1
CASE 1
IF PAR2==1 THEN - P2 =1 初始化力矩值得范圍-
FOR i=1 to 6
$TORQ_DIFF[i]=0
ENDFOR
Koll_dat[Index].A1=0
Koll_dat[Index].A2=0
Koll_dat[Index].A3=0
Koll_dat[Index].A4=0
Koll_dat[Index].A5=0
Koll_dat[Index].A6=0
ENDIF
IF PAR2==2 THEN 改變個軸的力矩范圍
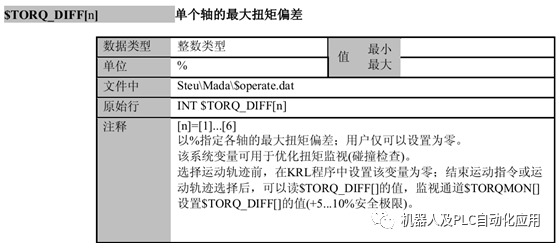
IF($TORQ_DIFF[1])>(Koll_dat[Index].A1)THEN
$TORQ_DIFF[1] A1軸的最大扭矩偏差
Koll_dat[Index].A1=$TORQ_DIFF[1]+PAR4 算出新的A1軸的力矩
ENDIF
IF($TORQ_DIFF[2])>(Koll_dat[Index].A2)THEN
$TORQ_DIFF[2] A2軸的最大扭矩偏差
Koll_dat[Index].A2=$TORQ_DIFF[2]+PAR4
ENDIF
IF($TORQ_DIFF[3])>(Koll_dat[Index].A3)THEN
Koll_dat[Index].A3=$TORQ_DIFF[3]+PAR4
ENDIF
IF($TORQ_DIFF[4])>(Koll_dat[Index].A4)THEN
Koll_dat[Index].A4=$TORQ_DIFF[4]+PAR4
ENDIF
IF($TORQ_DIFF[5])>(Koll_dat[Index].A5)THEN
Koll_dat[Index].A5=$TORQ_DIFF[5]+PAR4
ENDIF
IF($TORQ_DIFF[6])>(Koll_dat[Index].A6)THEN
Koll_dat[Index].A6=$TORQ_DIFF[6]+PAR4
ENDIF
ENDIF
CASE 2 P1=2 -激活使用力矩監(jiān)控-
IF PAR2==1 THEN P2=1 使用原有參數(shù)改變程序模式時的力矩監(jiān)控范圍-
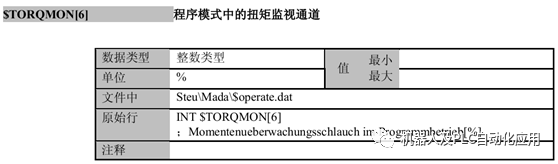
$TORQMON[1]=Koll_dat[Index].A1
-$TORQMON[1]程序模式中對1軸的力矩監(jiān)控范圍通道-
$TORQMON[2]=Koll_dat[Index].A2
$TORQMON[3]=Koll_dat[Index].A3
$TORQMON[4]=Koll_dat[Index].A4
$TORQMON[5]=Koll_dat[Index].A5
$TORQMON[6]=Koll_dat[Index].A6
ENDIF
IF PAR2==2 THEN P2=2 直接給力矩監(jiān)控范圍為200
FOR i=1 to 6
$TORQMON[i]=(200-KOLL_RED) -KOLL_RED=0
ENDFOR
ENDIF
DEFAULT
MLD(20,#QuitMsg) -如果P1等于除了1和2 的其他值提示錯誤-
ENDSWITCH
ENDIF
-------------------------------------------------
常用力矩變量:
-
力矩
+關注
關注
0文章
29瀏覽量
9886 -
User
+關注
關注
1文章
27瀏覽量
11014 -
過載
+關注
關注
2文章
110瀏覽量
20299
原文標題:抓手USER:TECH2_ Koll_Ueb 過載報警設置
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
伺服電機過載燒毀這3個參數(shù)調試細節(jié)
有方科技多款明星產品亮相IoT Tech Expo
過載保護器怎么調節(jié)
SDK_RTOS1.0.4版本,執(zhí)行user2的程序時,擦除user1時程序就死掉了,為什么?
什么是電機過載?它有哪些過載保護方法?
OTA時,由USER2.BIN更新USER1.BIN出錯,無法啟動怎么解決?
使用sys_reboot命令重啟進入user2程序不正常的原因?
如何在user_init()中設置默認波特率?
請問ESP8266_NONOS_SDK_V2.0 的user1.bin和user2.bin是一樣的嗎?
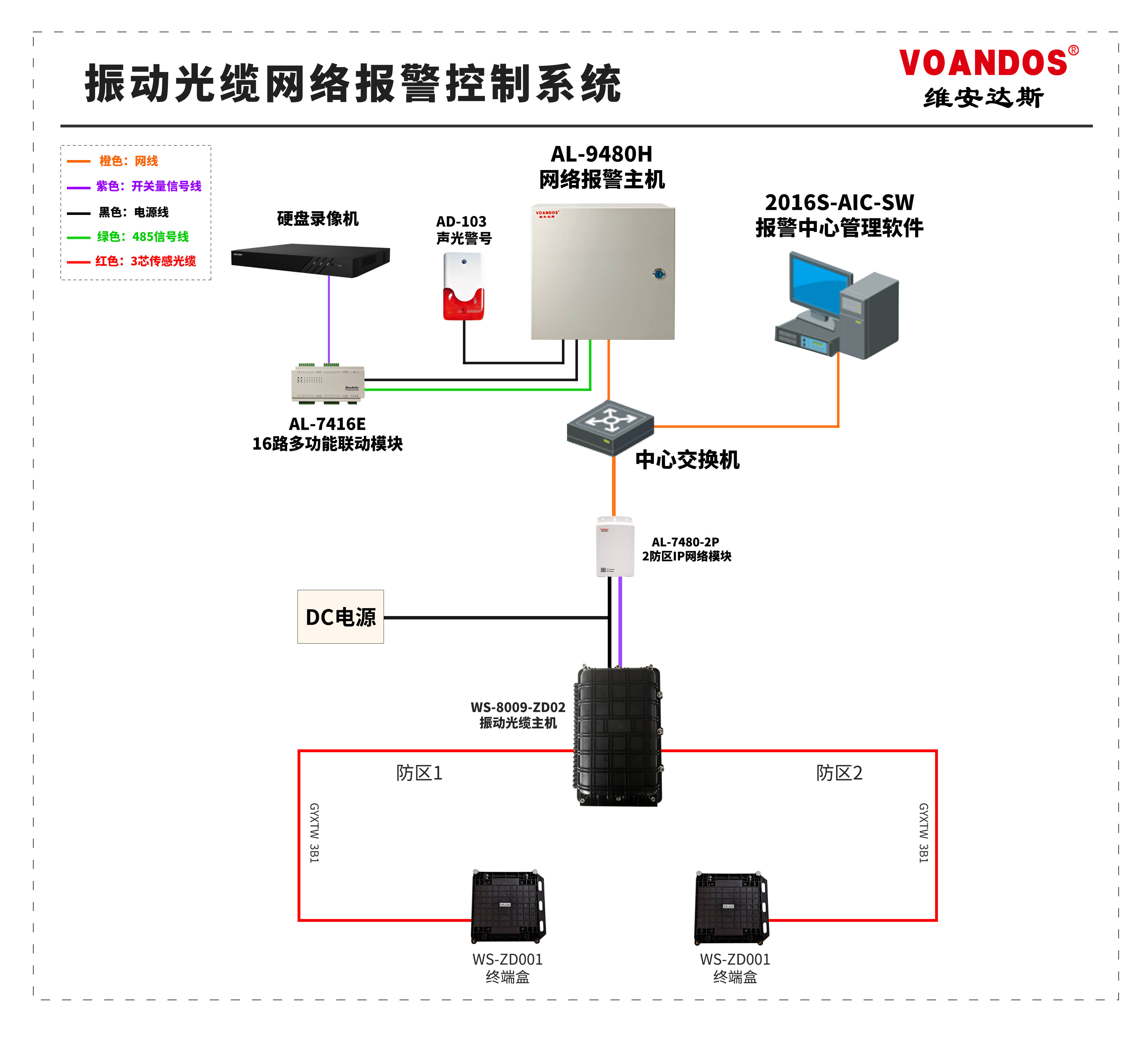
AL-9480H+SW軟件振動光纜2防區(qū)網絡報警控制系統(tǒng)





 工商網監(jiān)
工商網監(jiān)

評論