 通過采用SPCE061A單片機和角度傳感器實現電動車蹺蹺板的設計
通過采用SPCE061A單片機和角度傳感器實現電動車蹺蹺板的設計
在多次全國電子設計大賽中,電動車的設計一直都是熱點,從歷屆的電動車設計作品來看,電動車的車體往往做得大而重,且常常需要依靠車體以外的模塊輔助才能完成,這對于車來說就不夠智能化了。本文中電動車設計所采用的方案,車體小巧靈活,不需借助任何的附加設備即可工作,而且對蹺蹺板的要求很低。
1、總方案設計
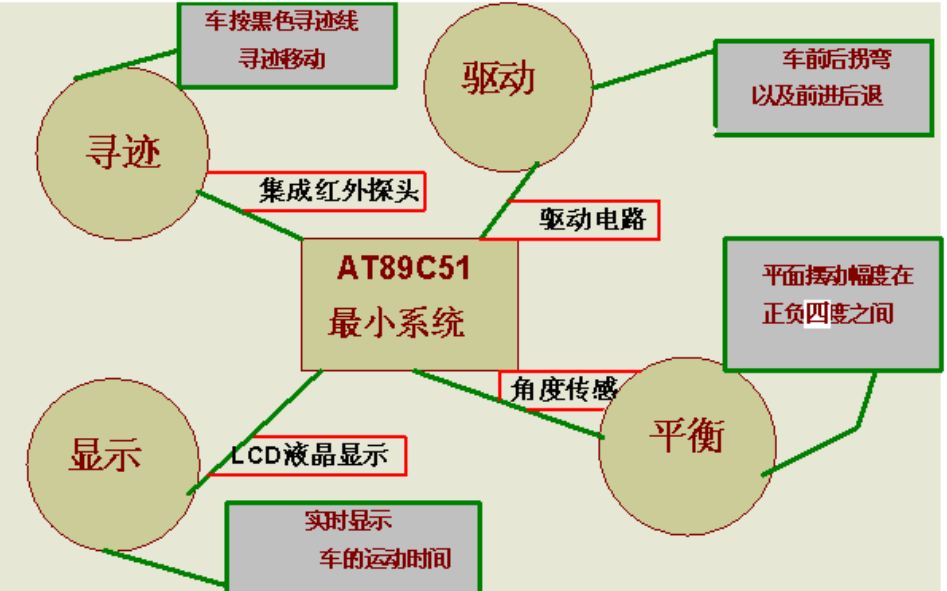
系統可以劃分為控制部分和信號檢測部分。其中,控制部分由控制器模塊、電源模塊、電機模塊、顯示模塊、語音模塊等模塊構成;信號檢測部分由平衡檢測模塊、引導模塊構成。采用單控制器,控制器和角度傳感器直接安裝在車體上,角度傳感器的角度信號傳送給控制器,控制器根據信號來判斷電動車當前的狀態,做出相應的反應(前進、后退、停車、平衡指示等)。采用單控制器使小車能夠更加靈活的行駛,避免了長信號線或者無線通信帶來的信號采集不準確問題。經過多次試驗,證明車體能夠輕松找到平衡點。系統方框圖如圖1所示。
該設計電動車蹺蹺板實物圖如圖2所示,從中可以看到,現在電動小車的狀態為平衡點附近,這是因為蹺蹺板的平衡是一種絕對的動態平衡,即平衡時,小車在板上平衡點做振動運動,因為這樣的運動幅度非常小,可以認為是一種偽靜態。
2、各模塊具體實現方案及硬件電路
2.1 車體設計及電機控制模塊
該設計采用的車體由鋁合金車架及兩個直流電機組成,具有堅固穩定的特點,并且直流電機帶有驅動電路及減速箱,減速箱的減速比為64:1。設計中使用L298搭建了驅動電路,經過調試車速可以分級控制。硬件電路圖如圖3所示。
2.2 控制器模塊
該設計采用凌陽公司的SPCE061A單片機,SPCE061A是16位結構的微控制器。該單片機具有驅動能力高和集成度高,易擴展,可靠性高,功耗低,結構簡單,中斷處理能力強等特點。SPCE061A的CPU時鐘為0.32~49.152 MHz,內置32 KB FLASH和2 KWords的SRAM,速度可以滿足電機控制對實時性的要求;SPCE061A還可以通過在線調試器:Probe和EZ Probe實現在線程序下載和調試,極大地提高開發效率;另外SPCE061A尤其適用于語音處理和識別等領域,可方便地用來實現聲音錄制、播放,只要調用庫函數即可實現音頻編程,可以實現語音播放功能,比別的單片機更有特色。因此選擇此方案。
2.3 電源模塊
該設計采用6節1.2 V可充電式鎳氫電池串聯共7.2 V給直流電機和傳感器供電,經過7805的電壓變換后為單片機供電。經過實驗驗證,采用此種供電方式后,只有一組電源,便于安裝,且直流電機工作良好,單片機、傳感器的性能穩定。電路原理圖見圖4。
2.4 引導模塊
該系統采用黑線引導法,在地面和蹺蹺板上均畫有黑線,用尋跡的方式引導電動車。尋跡采用RG149A光電對管。RG149A通過檢測反射信號的不同來區分黑白,信號經LM324整形后傳輸給控制器。LM324需外接一個滑動變阻器,以找到合適的阻值,使得輸出高低電平信號能被正確識別。經過反復試驗,尋線效果良好,在直線和彎道都能很準確地實現尋線,而且該管市面上容易購得。其硬件電路圖見圖5。
2.5 語音模塊
在語音模塊設計中直接使用凌陽61A板自帶語音模塊。正如前文介紹,61板具有強大的語音處理功能,擁有語音的MIC輸入端,自帶自動增益(AGC)控制,具有語音輸出接口,可外接喇叭。根據音頻處理模塊功能的強弱,在錄制語音時,需要選擇采樣率和音頻格式,同時還要注意音頻文件的大小。
2.6 顯示模塊
該系統設計采用凌陽公司生產的64×128液晶顯示屏模塊,該模塊自帶液晶顯示驅動,只需在程序中建立相應字庫即可實現顯示。因為在顯示模塊上的工作可以近似認為是一種實時性的,并且數據量大,這就需要在軟件的編寫上進行合理的安排,以使CPU及時響應和協調各功能子模塊的正常工作。
2.7 平衡模塊
該設計使用無觸點磁敏電位器自制重錘角度傳感器。在電位器上加一重錘,通過重錘的擺動角度帶來電位器角度的變化,以實現對角度的測量。該角度傳感器安裝在電動車上,當蹺蹺板處在非平衡狀態時,車體的傾斜角度反映在重錘的轉角上,再通過A/D轉換將角度信號采集到處理器中進行相關的處理。在本設計中,有三個關鍵角度值,即蹺蹺板上平衡區間的兩端點角度值和平衡區間中的實際中點值。小車在自動找平衡時,是根據平衡區間的端點值判斷自己是否處于平衡區,是則調用平衡區功能函數進行工作,直到最終找到真正平衡點。經過多次試驗論證,小車能夠快速準確地尋找到平衡點。原理圖及實物圖見圖6。
3、程序設計
軟件設計與工作流程圖如圖7所示。
4、理論分析與計算
4.1 角度傳感器原理
當電動車處于水平狀態時(此時蹺蹺板平衡),角度傳感器重錘成自然下垂狀態,此時得到一電壓值作為基準電壓;而當電動車處于非水平狀態時(此時蹺蹺板失衡),重錘會隨著蹺蹺板的傾斜角度而偏離原位置一定角度,從而產生電壓信號的變化,控制器根據電壓信號變化及趨勢來控制電機。
在本系統中當角度傳感器的工作電壓為3.3 V時,則應用角度傳感器關鍵值可以參照表1。
4.2 過程邏輯計算
在不加配重情況下,電動車從起始A出發到中心平衡點C的過程中,小車從A點快速前行至超過平衡點的下降點處,會檢測到傾斜角度電壓值有突然減小趨勢。此時,小車停止使角度傳感器穩定,之后小車根據傾角傳感器的電壓值倒車至平衡點附近,然后以小速度不斷調整尋找實際平衡點,直至平衡。
實際執行方案:先快速前行,當電壓信號(設為c)小于等于2.232 V時,快速倒車(只執行一次,用標志位判斷),此后的所有情況為:
當c≥2.253 V時,前進;
當c《2.232 V時,后退;
當2.232 V《c《2.253 V時,小車進入動態平衡區域。在動態平衡中蹺蹺板傾角在0°~5°變化(2.244 V≤c≤2.253 V),將此刻的電壓值與前一時刻的電壓值作比較,若前者大于等于后者,小車前行,否則小車停止;當蹺蹺板傾角在-5°~O°變化(2.232 V≤c≤2.238 0 V),將此刻的電壓值與前一時刻的電壓值作比較,若前者大于等于后者,小車停止,否則小車后退。當2.238 V《c《2.244 0 V即為實際中的平衡范圍,小車停止。
5、創新發揮與結果分析
5.1 創新發揮
該電動小車具有語音播報與語音識別功能。
(1)口令控制電動車開始行進,有無配重的兩種情況,通過不同的口令來實現。
(2)語音播報電動車工作狀態,例如到達平衡、到達B點等情況。
(3)語音提示加載第二塊配重和加載完畢。
同時,該小車具有同步顯示電動車的里程信息及速度等功能。通過RG149A光電對管掃描車輪上的8個孔來計算電動車行駛的距離。本系統的車輪周長為21.336 cm,設n為掃描的孔數,則掃描n孔行駛的距離為S=21.336/8*n(cm),再通過計時器得到電動車行駛時間,從而算得電動車的速度。將距離、時間、速度顯示在LCD屏上。
5.2 結果分析
第一階段時間測試結果如表2所示。
從測試結果可以看出,平衡點的尋找時間具有很大的隨機性,以至于時間超出了預計范圍。經過仔細觀察分析,問題出在車速等級之間變化過快上。這里提出兩套解決方案:一是加減速齒輪,但是在原來完整的車體上加減速齒輪機械上做起來比較困難,這個方案很快被否決了;第二套方案是不使用凌陽單片機自帶的PWM波,而是通過軟件自行制作占空比可調范圍更廣的方波,從而實現電機的無級變速。經過試驗,測試數據如表3所示。
由表2可看出,電動車已經可以在短時間內找到平衡點,因為采用無級變速,使得電動車在平衡點附近也能進行適當的速度調整,而不像之前在平衡區間只能始終采用一種速度。上板測試結果如表4所示。
平衡測試結果如表5所示。
從測試結果來看,本系統的性能接近預想狀態。
6、 結 語
電動車以凌陽SPCE061A作為電動車的控制核心,將無觸點磁敏電位器加重錘改造后自制成角度傳感器檢測平衡點,實現了電動車自動尋找蹺蹺板和板上平衡點自動尋找等功能。從測試結果可以看出,該設計達到預期效果。角度傳感器的自行設計是關鍵點所在,語音播報與語音識別功能和同步顯示電動車的里程信息及速度等功能是一大亮點。
責任編輯:gt
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083 -
單片機
+關注
關注
6035文章
44554瀏覽量
634660 -
電源模塊
+關注
關注
32文章
1701瀏覽量
92814
發布評論請先 登錄
相關推薦
電動車蹺蹺板求助
基于PTR8000+的電動車蹺蹺板控制系統
SPCE061A單片機硬件結構
基于SPCE061A單片機實現智能小車設計
基于SPCE061A單片機的圖形液晶模塊的驅動設計
基于SPCE061A單片機農牧區新能源智能噴灌系統設計與實現
如何使用AT89C51單片機設計電動車蹺蹺板的論文資料免費下載





 工商網監
工商網監
評論