 安富利手勢識別平臺又進化了
安富利手勢識別平臺又進化了
安富利手勢識別平臺又進化了,在樹莓派上,安富利實現了攝像頭和毫米波雷達融合的手勢識別方案。攝像頭負責識別靜態手勢,攝像頭讀取的圖像,經過openCV和機器學習分類器后,完成手勢識別,最后輸出1,2,3,4 等結果。后期借助于TensorFlow架構將Hand Tracking GPU整合進融合平臺。毫米波雷達負責動態手勢的識別, 相對于攝像頭,毫米波雷達可以更好的保護客戶隱私,而且算法簡單不需要GPU以及神經網絡的支持,因此反應更快功耗更低。目前安富利借助于英飛凌BGT60TR13芯片,實現了揮手,旋轉手勢以及揉搓手指等6種手勢識別。關于毫米波雷達的手勢控制具體內容和演示視頻可參考往期文章《利用毫米波完成精細化手勢識別》。
硬件平臺
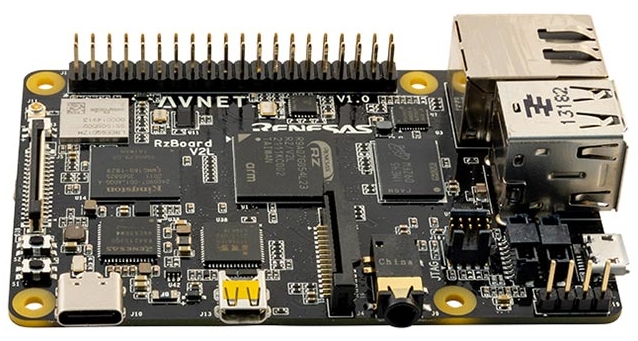
攝像頭負責采集圖像,在樹莓派上借助于Python開發環境,實現了手勢提取和識別。利用攝像頭完成手勢識別,目前有很多架構和開源代碼可以參考,目前比較火熱甚至被玩壞的 Hand Tracking GPU,這款應用基于TensorFlow 目前已經開源,小伙伴們可以盡情的玩起來了。
英飛凌60GHz雷達處理芯片BGT60TR13,5GHz的掃頻帶寬,在FMCW工作模式中,可以實現3cm的距離分辨率,可以識別精細的手勢。安富利目前的手勢識別算法運行在60GHz的毫米波雷達平臺上,掃頻帶寬為3GHz,目前已經實現旋轉,左右揮手,上下揮手以及揉搓手指等手勢識別。樹莓派作為中央處理器,接收來自攝像頭和毫米波雷達的傳感器數據,并完成手勢識別并顯示在顯示屏上,方案如圖 1所示。
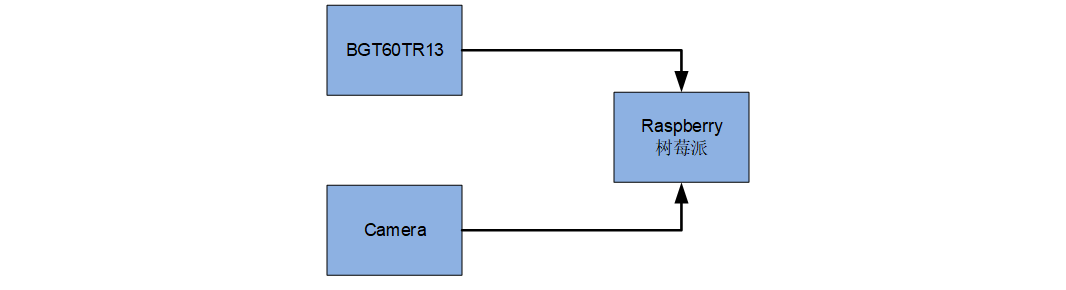
圖 1安富利手勢識別平臺
軟件流程 安富利北京實驗室目前已經完成一整套代碼開發,方便客戶做二次開發。具體功能如圖 2所示,在毫米波雷達方向上信號流為2-D FFT變換, 基于硬件加速的峰值搜索,恒虛警算法篩選潛在目標,基于相差比較方法計算角度波達方向角,以及在SDK環境下的手勢分類識別,最后將手勢識別結果顯示在GUI上。在攝像頭方向上,借助于openCV完成攝像頭采集,輪廓提取并借助于scikit-learn庫函數中的SVC分類器完成手勢分類。
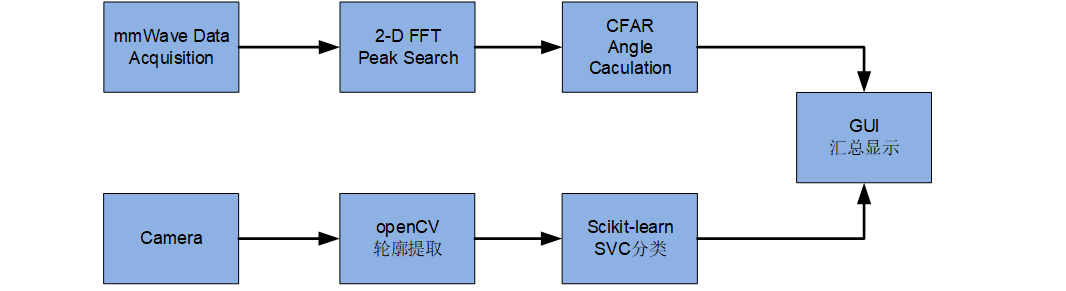
圖 2 軟件功能框圖
演示效果截圖
在截圖中,第一排顯示的是基于攝像頭的手勢識別,簡單演示了識別1,2,3,4,5。第二排,主要是演示了基于毫米波雷達的手勢識別,能夠識別左揮手,右揮手,順時針旋轉手勢,逆時針旋轉手勢。以及包括揉搓手指的微多普勒手勢,包括接近雷達和遠離雷達。
-
芯片
+關注
關注
455文章
50732瀏覽量
423253 -
手勢識別
+關注
關注
8文章
225瀏覽量
47786 -
毫米波雷達
+關注
關注
107文章
1043瀏覽量
64349
原文標題:手勢識別,可以玩起來了
文章出處:【微信號:AvnetAsia,微信公眾號:安富利】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
安富利榮獲安森美“2024年度智能感知參考設計創新獎”
安富利榮獲TE 2024年度最佳分銷商獎
安富利榮獲2024年度金旗獎企業社會責任金獎
安富利攬獲英飛凌多項大獎
安富利榮獲Nordic年度最佳分銷商獎
安富利榮獲第六屆金輯獎“最佳技術實踐應用獎”
安富利榮獲恩智浦多項榮譽
安富利與合作伙伴共筑綠色未來
安富利推出新品牌Tria?以整合嵌入式計算選項
安富利BMS方案,蓄力綠色儲能未來

安富利中國在汽車芯片產業的影響力與角色
產業鏈創新、人才先行,安富利積極推動基于先進計算平臺的產學研融合

獲安森美頒獎,展現安富利新領域新價值

彌堅彌真!安富利獲Amphenol ACS最佳支持獎






 工商網監
工商網監
評論