") Velodyne Lidar提供精確、強(qiáng)大的移動繪圖
Velodyne Lidar提供精確、強(qiáng)大的移動繪圖
Velodyne Lidar提供精確、強(qiáng)大的移動繪圖。
據(jù)麥姆斯咨詢報道,Velodyne Lidar, Inc.近日宣布推出的NavVis VLX可穿戴式室內(nèi)移動繪圖系統(tǒng)配備Velodyne激光雷達(dá)傳感器,可提供高質(zhì)量3D測量數(shù)據(jù)捕獲。NavVis VLX專為在建筑工地和多層高樓等復(fù)雜的建筑環(huán)境中捕獲現(xiàn)實而設(shè)計。
每套NavVis VLX系統(tǒng)都使用兩臺Puck LITE傳感器來捕獲點云數(shù)據(jù),以創(chuàng)建建筑文檔,包括平面圖、3D模型和數(shù)字孿生(digital twin)。NavVis VLX將Velodyne圖像數(shù)據(jù)與NavVis同步定位與地圖構(gòu)建(SLAM)技術(shù)相結(jié)合,可通過移動設(shè)備提供測量級點云。其緊湊的通用設(shè)計使該系統(tǒng)能夠繪制小的、分散的和狹窄的空間,以及有著大量障礙和不平坦地形的環(huán)境。
NavVis首席技術(shù)官Georg Schroth表示:“Velodyne傳感器為我們的移動繪圖系統(tǒng)提供實時3D數(shù)據(jù)。這種寶貴的輸入已在開發(fā)業(yè)界領(lǐng)先的SLAM算法方面發(fā)揮重要作用,而這些算法能夠為我們的旗艦移動繪圖系統(tǒng)NavVis M6提供支持。現(xiàn)在,我們推出NavVis VLX,這款互補(bǔ)設(shè)備在緊湊的通用設(shè)計中采用了相同的突破性SLAM技術(shù)。我們非常高興Velodyne能參與我們的工作,為激光掃描專業(yè)人員提供能夠帶來測量級結(jié)果的快速、高效的建筑物掃描工具。”
Velodyne Lidar歐洲執(zhí)行董事Erich Smidt表示:“NavVis移動繪圖系統(tǒng)可捕獲實際建造文檔所需的數(shù)據(jù),例如3D模型和平面圖,以及用于企業(yè)制造設(shè)施的實際數(shù)字工廠。利益相關(guān)者可以檢查、記錄和共享有關(guān)建筑物和工廠的信息,以跟蹤里程碑,計劃搬遷,改善客戶和員工的體驗。NavVis VLX系統(tǒng)充分展示了企業(yè)如何借助Velodyne傳感器的性能、范圍和緊湊的外形構(gòu)建創(chuàng)新的系統(tǒng)。這款解決方案可滿足AEC公司、測量師和激光掃描專業(yè)人員的專業(yè)移動繪圖需求。”
Velodyne Puck LITE傳感器可提供高分辨率圖像,用于測量和分析室內(nèi)外環(huán)境。Puck LITE專為需要重量輕、體積小的傳感器的應(yīng)用而設(shè)計,為移動和無人飛行器(UAV)/無人機(jī)應(yīng)用提供出色的分辨率和性能。它提供完整的360度全景環(huán)境視圖以及實時3D數(shù)據(jù)。
關(guān)于Velodyne Lidar
Velodyne致力于為自動駕駛和駕駛輔助提供智能、強(qiáng)大的激光雷達(dá)解決方案。Velodyne總部位于加州圣何塞,以其突破性的激光雷達(dá)傳感器技術(shù)組合而聞名于世。2005年,Velodyne的創(chuàng)始人David Hall發(fā)明了實時環(huán)繞視圖激光雷達(dá)系統(tǒng),成為Velodyne Acoustics的組成部分。Hall先生的發(fā)明徹底改變了面向汽車、新出行方式、測繪、機(jī)器人和安防領(lǐng)域的感知和自主性。Velodyne的高性能產(chǎn)品系列包括廣泛的傳感解決方案,例如具有成本效益的Puck、多功能型Ultra Puck、自主駕駛高階型Alpha Prime、經(jīng)ADAS優(yōu)化的Velarray以及駕駛輔助用開創(chuàng)性軟件Vella。
關(guān)于NavVis
NavVis是全球領(lǐng)先的、面向企業(yè)的室內(nèi)空間智能技術(shù)和解決方案的提供商,深受寶馬(BMW)、戴姆勒(Daimler)、安聯(lián)(Allianz)、聯(lián)想和德國電信(Deutsche Telekom)等頂級公司的信賴。NavVis通過其強(qiáng)大的室內(nèi)數(shù)字孿生平臺(支持在空前的速度和規(guī)模下進(jìn)行精確繪圖、專為協(xié)作而設(shè)計的沉浸式3D可視化,以及開創(chuàng)人工智能定位技術(shù)的基于位置的應(yīng)用程序),幫助企業(yè)提高效率和優(yōu)化經(jīng)營績效。NavVis成立于2013年,總部位于慕尼黑,在紐約和上海設(shè)有辦事處。
-
傳感器
+關(guān)注
關(guān)注
2550文章
51046瀏覽量
753132 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3971瀏覽量
189837
原文標(biāo)題:Velodyne激光雷達(dá)應(yīng)用于NavVis VLX可穿戴式室內(nèi)移動繪圖系統(tǒng)
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦

LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
LiDAR激光點云數(shù)據(jù)處理軟件處理流程
lidar激光雷達(dá)掃描儀有什么用
lidar傳感器和ryyb哪個好
服務(wù)提供商數(shù)據(jù)在精確定位中的應(yīng)用
如何利用生成式人工智能進(jìn)行精確編碼
壁仞科技為中國移動呼和浩特智算中心提供強(qiáng)大算力
什么是LiDAR?LiDAR技術(shù)的新時代 前景廣闊未來可期
直接飛行時間(dToF) SiPM LiDAR 平臺SECO-測距儀-GEVK數(shù)據(jù)手冊

康謀分享|aiSim5激光雷達(dá)LiDAR模型驗證方法(二)

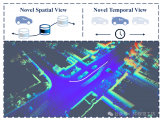
LiDAR4D:基于時空新穎的LiDAR視角合成框架
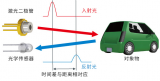
激光雷達(dá)LIDAR基本工作原理

Valeo為何堅守著LiDAR?
基于LiDAR點流的運(yùn)動事件檢測






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論