 雙層感測能實現緊湊的順應性傳感器
雙層感測能實現緊湊的順應性傳感器
在人類皮膚內的緩慢適應(SA)受體中,SA-I(Merkel cell)和SA-II(Ruffini organ)在順應性感覺中起關鍵作用。前者以高分辨率測量施加在皮膚上的靜壓,而后者則能夠檢測皮膚的伸展。隨著可拉伸材料和微細加工技術的發展,報道了能夠檢測溫度以及靜態和動態力的柔性傳感器。由于順應性傳感器是一種重要的感測塊,因此需要對其進行開發并將其集成到人造皮膚上,以為假肢或機器人系統提供類似人的感覺。然而,已有的四種傳感機制(轉換為數字讀取的電信號)的傳感器外部組件(精密光學測量組件等)體積龐大,因此將這些傳感器用于需求緊湊的外形尺寸的應用中仍然面臨著巨大的挑戰。此外,順應性傳感設備復雜是因為其需要同時測量施加的壓力和變形信息兩個參數以檢測物體的順應性。在沒有耦合效應的情況下,將壓力和應變傳感器集成也是一項挑戰。如要開發可集成到人造皮膚或機器人系統中的順從性傳感器,則需要滿足以下要求:1)應該具有易于集成的緊湊型尺寸;2)不需要大型外部組件或集成系統中的重大結構更改;3)傳感器應該具有解耦可靠性能。
基于此,斯坦福大學的鮑哲南教授(通訊作者)團隊報道了一種仿生的、薄順應性傳感器。利用該傳感器可同時檢測人體皮膚中類似于SA-I和SA-II的壓力和應變,而無需任何笨重的外部組件且不會占用相當大的體積。為了模擬SA-I和SA-II的拉伸和壓力感應能力,研究人員將基于薄膜的應變傳感器(MBSS)耦合到壓力傳感器,以識別接觸的材料。實驗結果證實,該混合傳感器可以同時捕獲所接觸材料的表面變形和所施加的壓力。通過利用基于電阻和電容的傳感器,研究人員為MBSS開發了兩種不同的傳感方法。例如,當分別測試模量為75 GPa和20 kPa的材料時,電阻傳感器的靈敏度為11 Ω/N和104 Ω/ N。同樣,對于類似材料,電容式傳感器的靈敏度分別為80 fF/N(femtofarad Newton)和1280 fF/N。同時,還展示了通過減小薄膜的厚度可以調節傳感器的靈敏度,尤其是需要更高的分辨率時。此外,傳感器的薄型和小尺寸使其能夠應用于不同的應用中。首先,將傳感器集成到機械手的手指上,并能確定抓握物體的順應性。其次,通過構建陣列傳感器能夠繪制出由不同材料制成的物體的表面圖,對于檢測組織內部的不規則物體(如腫瘤)非常有用。
研究人員提出了一種雙層感測方法,以實現這種緊湊的順應性傳感器。其中,第一層由可拉伸薄膜組成以檢測被觸摸材料的表面變形,第二層由壓力傳感器組成。通過對齊和層壓柔性層可以制造傳感器陣列。應變傳感器(MBSS)由相對于柱狀結構上的圓形開口對齊的基于電容或電阻的應變傳感器組成。當MBSS與材料接觸時,它會隨著接觸壓力的增加而變形。同時,由壓力傳感器測量施加的壓力。結合MBSS和壓力傳感器的輸出,可以為每個對象計算出靈敏度(S,應變響應與壓力響應的比值),而S可以區分不同柔順性的材料(S較大即代表柔順性更高的材料)。
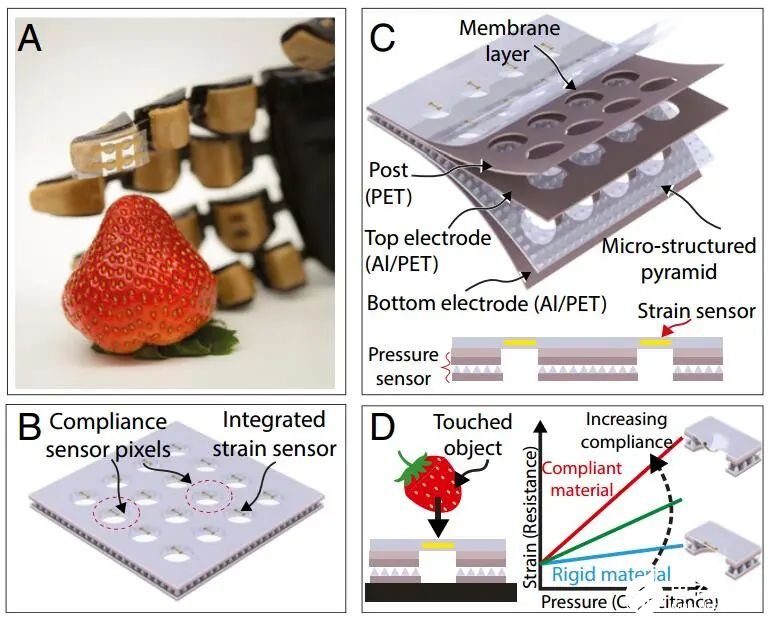
圖1、檢測材料的順應性
研究人員通過開發了有限元(FE)模型,以確定傳感器的重要幾何和材料特征以及對不同順應性的材料的響應。當半徑從0.5 mm增加到2 mm時,MBSS的撓度增加了4倍以上。通過將MBSS的模量從0.25 MPa變到2 MPa時,位移沒有顯著差異。當使用半徑為1 mm且厚度為50 μm的聚二甲基硅氧烷(PDMS)薄膜識別模量為0.25和1 MPa的材料時,其靈敏度幾乎提高了兩倍,而10 MPa的材料對徑向應變幾乎沒有響應。在小的變形狀態中,變形的增加會增加薄膜的曲率,從而導致電容的增加。進一步使薄膜變形,電極之間的間隙由于拉伸而增大,并主導了曲率效應,電容開始減小。
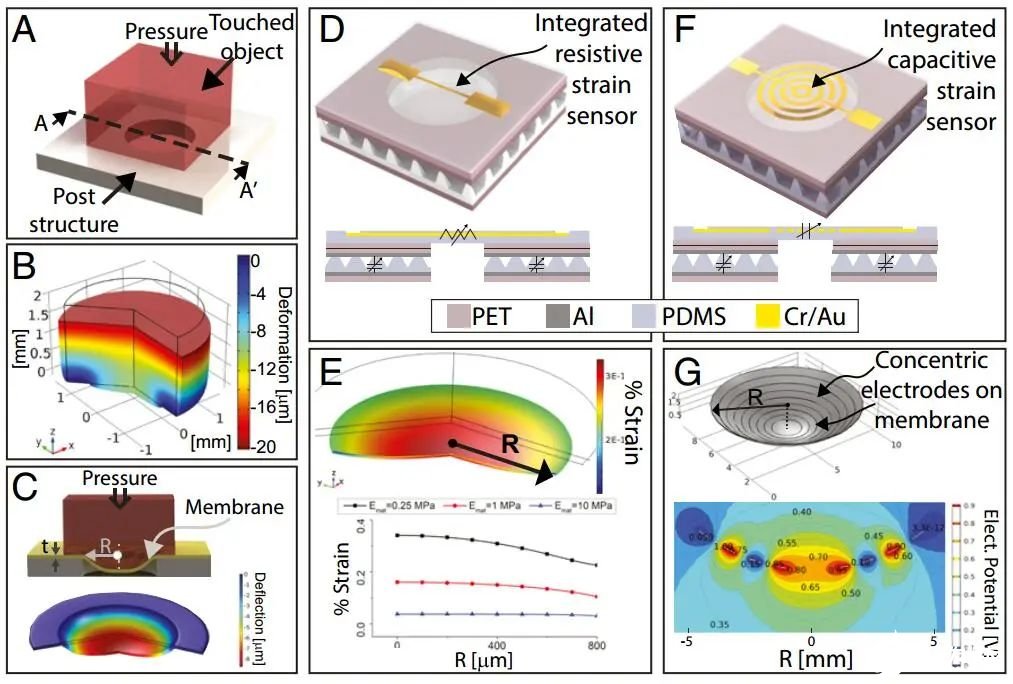
圖2、獨立式順應性感測單元的FE模型
研究人員利用了彈性體PDMS來產生具有不同模量的材料。同時,還測試了三種不同的PDMS比例,即PDMS(10: 1)、PDMS(25: 1)和PDMS(50: 1),厚度都為3 mm,通過單軸壓縮測試確定楊氏模量分別為2.02±0.18、0.39±0.038和0.0247±0.0017 MPa。當傳感器與更柔順的材料接觸時,傳感器的響應靈敏度更高。對于PDMS(50: 1)、PDMS(25: 1)、PDMS(10: 1)和玻璃測得的S值分別為104±7.8、75±6.1、47±2.4和11±0.94 Ω/N。對不同材料的順應性傳感器的測量,發現更順應性的材料產生了更高的S。通過測試相同厚度(3 mm)的各種物體,這些物體均支撐在剛性基板上,且根據材料的楊氏模量能夠顯示出S的顯著差異。因此,在材料尺寸未知的情況下,傳感器輸出S可用于根據其柔度進行分類。
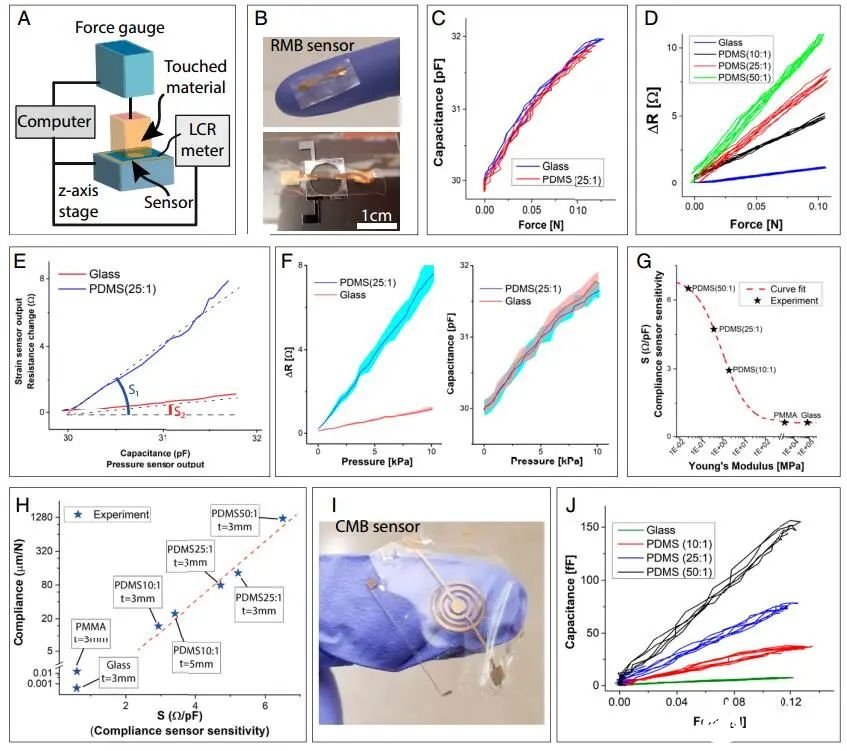
圖3、RMB和CMB傳感器的表征
最后,研究人員制備了一個獨立的感應單元,其由一個面積為1×1 cm2的RMB傳感器組成,并集成在機器人手指的一側。在機器人手指之間放置不同的材料,發現當電容達到最大極限時,機械手手指就會停止并重新開始沿相反方向移動,以釋放所抓取的材料。對于順應性材料,在類似的作用力下,最大電阻值會增加。該結果證明了該傳感器可用作機器人手指上的順應性傳感器的能力。此外,還開發了兩種不同的順應性映射器件,以顯示傳感器在假體應用中的適用性。對于這兩種測試,接觸更柔順材料的像素具有相對較高的S值。對于這兩種情況,順應性傳感器都能夠對材料的順應性進行分類,從而證明該器件具有潛在的假肢傳感器的功能。

責任編輯:pj
-
傳感器
+關注
關注
2550文章
51071瀏覽量
753331
發布評論請先 登錄
相關推薦
實現MCU與傳感器的通信方式
磁感傳感器工作方式及特點介紹AL-09AL-09R

磁性開關傳感器原理及應用是什么
磁致伸縮位移傳感器原理,適配性,精度

水位傳感器怎么測好壞
TDK |?緊湊、低功耗!CO?傳感器
中科微感MEMS氣體傳感器量產技術再次突破瓶頸,良品率接近98%

多感科技攜自研的光學傳感器芯片及產品亮相深圳傳感器展覽會
走進傳感器廠商能點科技

基于柔性無線IMU傳感器的稀疏傳感網絡

基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性







 工商網監
工商網監
評論