 VW大眾標準中BAS()程序的使用淺談
VW大眾標準中BAS()程序的使用淺談
表層程序:
KLIN VB=8[mm/s] Genau=2[mm]ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
軌跡程序
1: FB PSPS = M30 & M32 & M39 & E41 & E45& E56 & E74 & E77 & E80
SPS程序
內部程序:
VW_MPARA_ACT=P6_D點號轉存
Act_P1 =P6 存儲點
Act_P2 =P6 存儲點
VW(#MPARA,TRUE)執行后臺 輔助程序
SPS_FERTIG=FALSE
TRIGGERWHEN DISTANCE=1 DELAY=0 DO SPS_TRIG(10006) PRIO=-1執行SPS程序
LIN P6C_DIS 執行工藝直線軌跡
$ADVANCE=1 激活預執行
---------------------------------------------------


DEF TOOL (TOOL_NO:IN )
INT TOOL_NO 聲明: 整數形式變量TOOL_NO
IF (TOOL_NO==0) THEN 如果工具號 為 0
$TOOL=$NULLFRAME 對工具坐標 進行清零
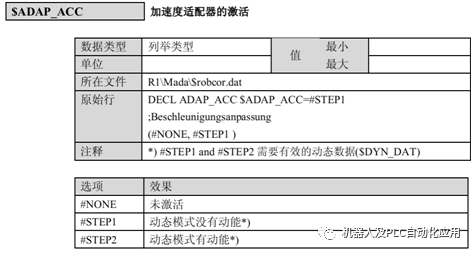
IF $ADAP_ACC<>#NONE THEN加速度適配器的激活 = #STEP2
$LOAD.M=$DEF_L_M 載荷質量機器人自身值
$LOAD.CM=$DEF_L_CM 載荷重心
$LOAD.J=$DEF_L_J 載荷 慣性
ENDIF
ELSE -------如果有工具號
CONTINUE
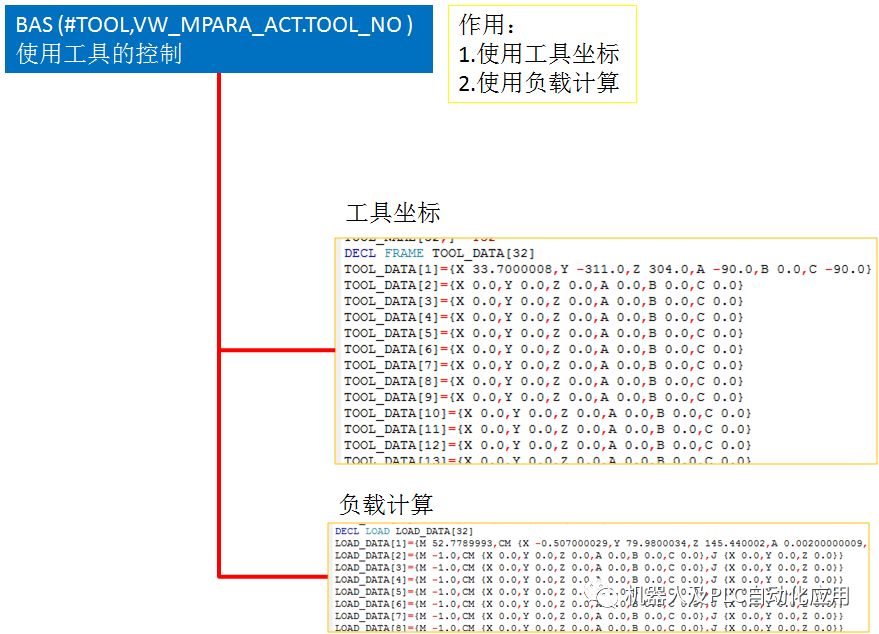
$TOOL=TOOL_DATA[TOOL_NO] 使用工具庫對應的號里的工具信息
IF $ADAP_ACC<>#NONE THEN加速度適配器的激活 = #STEP2
IF LOAD_DATA[TOOL_NO].M<0 THEN?負載庫里的重量值為小于0
$LOAD.M=$DEF_L_M 使用機器人自身計算值
$LOAD.CM=$DEF_L_CM
$LOAD.J=$DEF_L_J
ELSE---------負載庫里的重量值有數
$LOAD.M=LOAD_DATA[TOOL_NO].MCONFIG.dat里計算值質量
$LOAD.CM=LOAD_DATA[TOOL_NO].CMCONFIG.dat里計算值重心
$LOAD.J=LOAD_DATA[TOOL_NO].JCONFIG.dat里計算值慣性
IF (($LOAD.M<>0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0) AND ($LOAD.J.Z==0)) THEN如果有重量,但重心 是0,0,0就用機器人自身值
$LOAD.J=$DEF_L_J載荷重心
ENDIF
ENDIF
ENDIF
ENDIF
CONTINUE
$ACT_TOOL=TOOL_NO 激活的工具號
END
$LOAD預先運行中當前有效的載荷數據
該結構包含輸入到機器人控制器中并分配給當前工具的有效載荷數據。參考坐標系是FLANGE坐標系。
$LOAD={M 重量 , CM重心, J慣性}
M質量類型:REAL;單位:公斤
CM 重心 FRAME
X,Y,Z:重心相對于法蘭的位置
A,B,C:主慣性軸相對于法蘭的方向
J慣性:Type: INERTIA
X,Y,Z:圍繞相對于法蘭旋轉了A,B和C的坐標系軸的慣性矩。




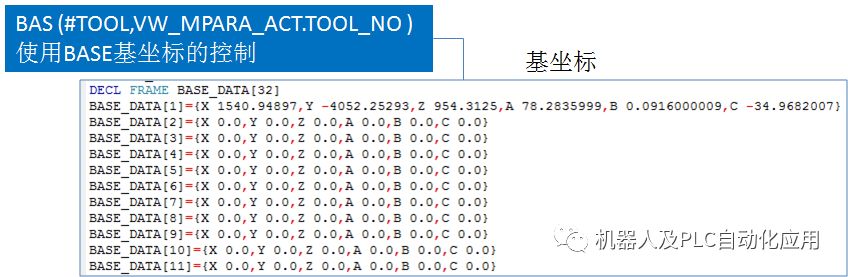
DEF BASE (BASE_NO:IN )
INT BASE_NO 聲明: 整數形式變量BASE_NO
IF (BASE_NO==0) THEN如果給的BASE號是0
CONTINUE
$BASE=$WORLD就使用全球坐標作為$BASE坐標值
ELSE 如果給的BASE號不 是0
CONTINUE
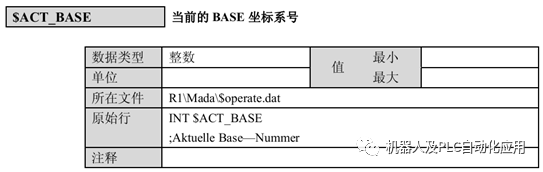
$BASE=BASE_DATA[BASE_NO]將CONFIG.dat里的BASE庫值 寫入BASE坐標里
ENDIF
CONTINUE
$ACT_BASE=BASE_NO ; 顯示當前使用的BASE號
CONTINUE
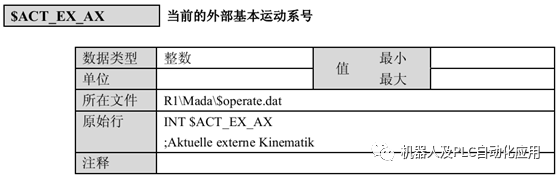
$ACT_EX_AX=-1 外部軸使用的BASE號
END
-
存儲
+關注
關注
13文章
4326瀏覽量
85939 -
程序
+關注
關注
117文章
3791瀏覽量
81153 -
變量
+關注
關注
0文章
613瀏覽量
28404
原文標題:VW大眾標準中BAS()程序的使用淺談
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
上汽大眾途昂榮獲中汽數據“2024年耐腐蝕卓越車型”
PD快充芯片U8722BAS可減少非必要能效損耗

基于氮化鎵的電源芯片U8722BAS具有更低成本效益
Soundcheck 自動比對程序 標準品比對
TLE9879QXA40_eSL-BAS-EVAL未找到軟件包的原因?
淺談能耗監測管理系統在產業園區中的應用與分析

淺談IT隔離電源系統在醫院電氣設計中的應用
淺談消防應急照明和疏散指示系統在地鐵中的設計應用
淺談配電節能技術在醫院建筑中的應用







 工商網監
工商網監
評論