") 聊聊C2機器人的校零
聊聊C2機器人的校零
最近在校正C2機器人時遇到了一個小事故,機器人的EMT壞了,反復校正零點報校正超時.
今天我們就聊聊C2機器人的校零.
為什么要校零?
1.當機器人校正的時候,各個軸就可以運動到一個特定的機械位置,也就時所謂的機械零點。
2.一旦機器人運動到機械零點,各個軸上的絕對編碼盤的值就被保存下來了。
機器人零位校正后,可以用直角坐標系移動機器人或運行程序;同時機器人也知道軟限位的位置.
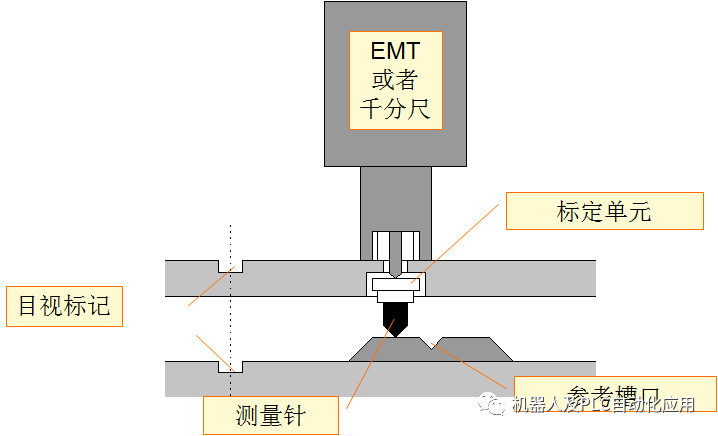
校零裝置:
1.EMT
2.千分表
控制運行過程示意:
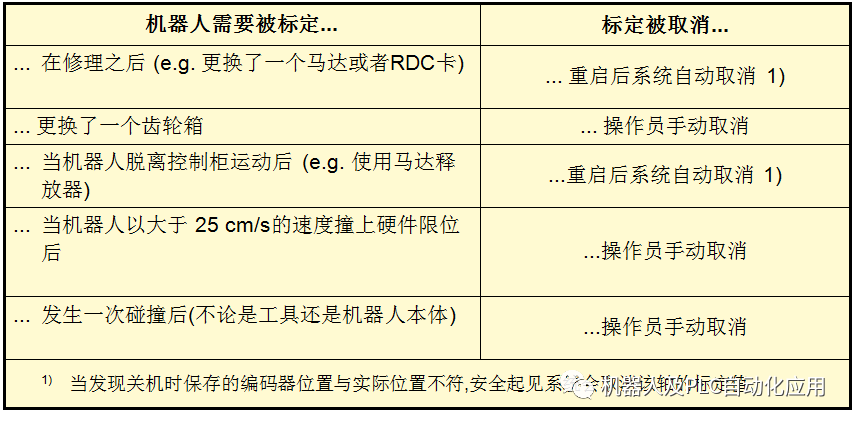
重新標定的情況:

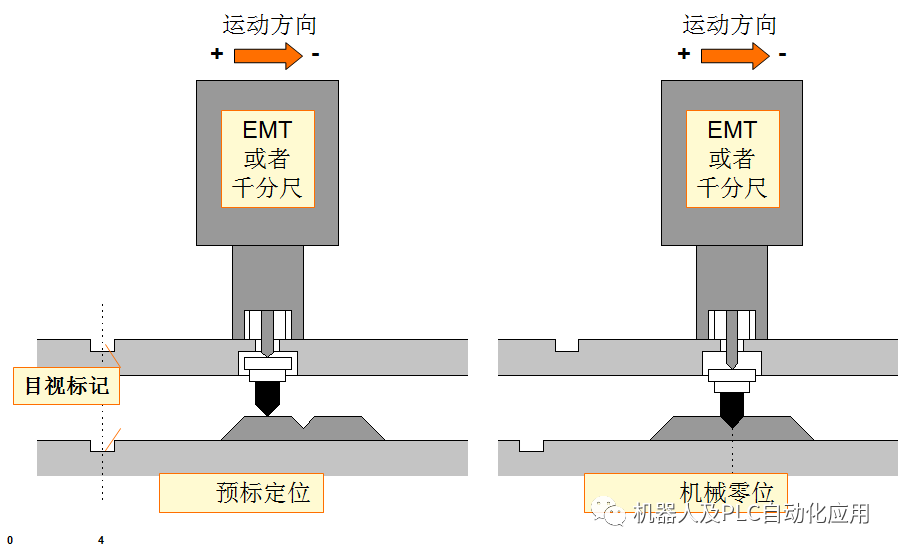
使用EMT標定:
?把需要標定的軸移動到預標定位 (如圖所示白線位置)
?使用軸坐標系移動機器人各軸
?每個軸的標定是獨立的

?從1軸開始往上標定
?每個軸總是從正向往負向運動
?僅僅在T1模式下!

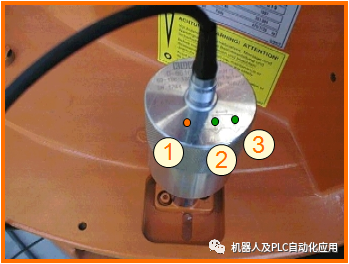
?摘掉標定單元的保護蓋
?接上EMT 并連上信號線(另一端連接到機器人底座上的連接盒接口 X32上)

?EMT上有三個指示燈:
1. 紅色 - 錯誤
2.綠色 - 下降沿
3. 綠色 - 上升沿
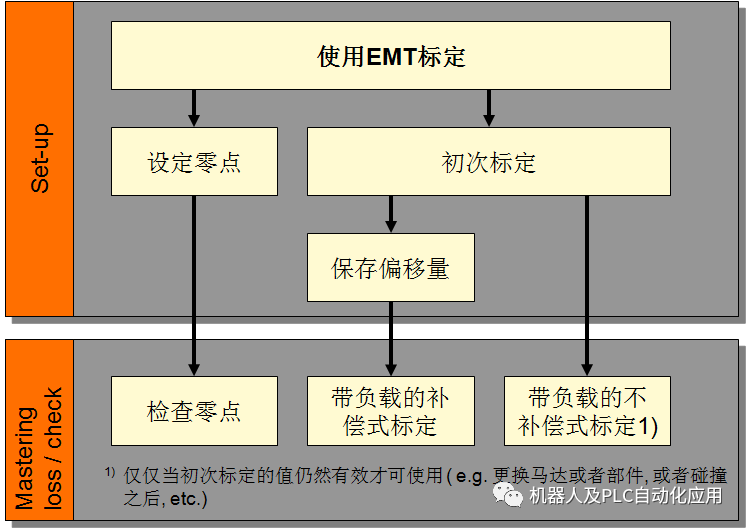
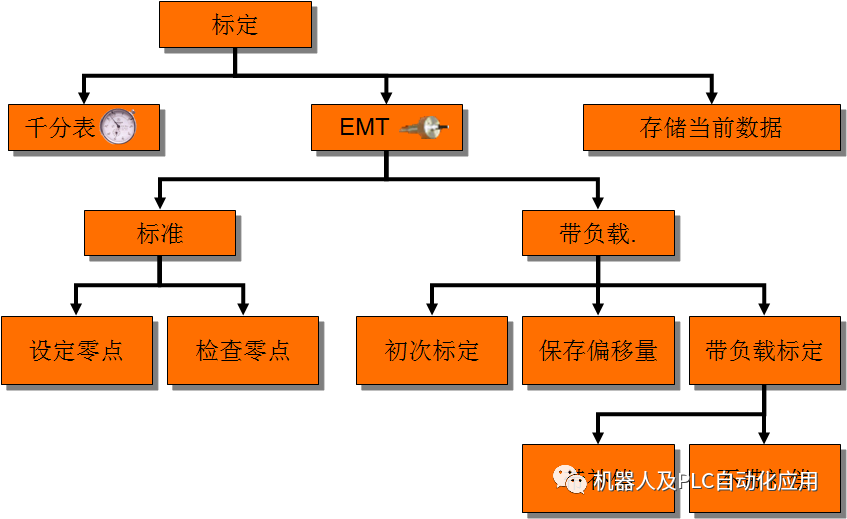
標定菜單:
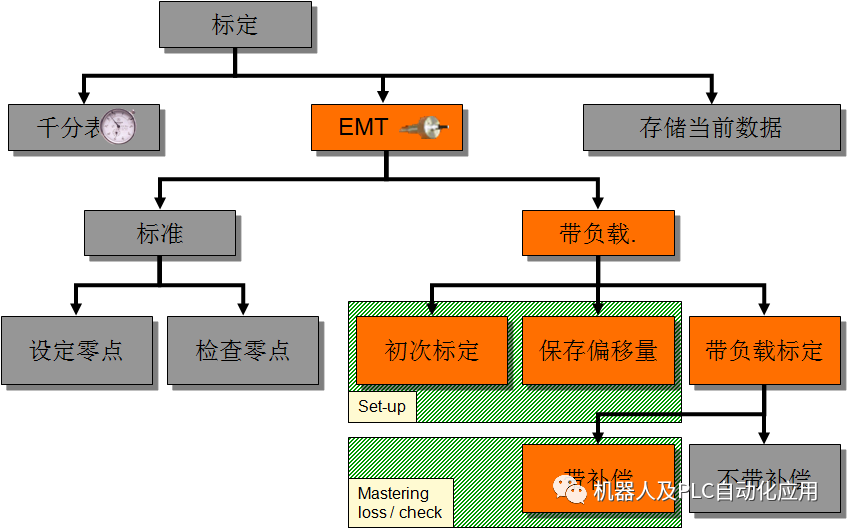
對于精確定位機器人的標定:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
機械
+關注
關注
8文章
1571瀏覽量
40525 -
自動校零
+關注
關注
0文章
2瀏覽量
5520
原文標題:KUKA-C2機器人-校零
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》 一書由甘一鳴、俞波、萬梓燊、劉少山老師共同編寫,其封面如圖1所示。
本書共由5部分組成,其結構和內容如圖2所示。
該書可作為高校和科研機構的教材,為學生和研究人員提供系統(tǒng)
發(fā)表于 12-20 19:17
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎模塊
,互聯(lián)網行業(yè)占成熟經濟體的GDP增長的21%,世界經濟正面向數字經濟轉型的大趨勢。具身智能機器人集成人工智能、高端制造、新材料等技術,其核心在于通過智能體與環(huán)境的動態(tài)互動實現(xiàn)智能行為。
在第2章“具身
發(fā)表于 12-19 22:26
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示,機器人的角色為迎賓機器人,開發(fā)板負責人賓客出現(xiàn)監(jiān)聽
發(fā)表于 12-02 14:55
開源項目!用ESP32做一個可愛的無用機器人
/Kawaii-Useless-Robot
也可以“可愛的無用機器人”打包下載所有3D打印文件。
項目鏈接:https://www.instructables.com/Kawaii-Useless-Robot-2024-Edition/
項目作者:tobychui
*附件:可愛的無用
發(fā)表于 09-03 09:34
開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,機器人啟
發(fā)表于 08-30 14:50
柔性機器人與剛性機器人區(qū)別與聯(lián)系
、伸縮和變形。其結構通常模仿生物體的柔性和彈性特征。 剛性機器人:由剛性材料(如金屬、硬質塑料等)制成,具有固定形狀和結構,無法輕易變形。 2.運動方式 柔性機器人:通過柔性驅動(如氣動、液壓、形狀記憶合金等)實現(xiàn)復雜的運動方

ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
,簡單快捷地調用合適的算法庫,以提高開發(fā)效率,加快開發(fā)進程。
(2) 開源免費,架構精簡
ROS系統(tǒng)是一個開源免費,架構精簡的機器人操作系統(tǒng)。ROS被設計為盡可能精簡,以便為ROS編寫的代碼可與其
發(fā)表于 07-09 11:38
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優(yōu)勢?薩科微AI大模型機器人由清華大學畢業(yè)的天才少年N博士和王博士團隊開發(fā),與同行相比具有許多優(yōu)勢:語言
發(fā)表于 07-05 08:52
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
、Zynq和攝像頭為硬件基礎,搭建了六自由度機器人視覺平臺。
(2)設計了基于 FPGA的視覺檢測方案。利用 西林提供的 HLS和CV庫對從攝像頭采集到的像素流進行實時處理,并設計了一套識別物塊坐標
發(fā)表于 05-29 16:17
基于飛凌嵌入式RK3568J核心板的工業(yè)機器人控制器應用方案
控制器作為工業(yè)機器人最為核心的零部件之一,對機器人的性能起著決定性的影響,在一定程度上直接影響著機器人的發(fā)展。那么機器人控制器的功能是如何實
發(fā)表于 05-11 09:40
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
大的吸力,有效清除各類污漬和顆粒物。同時,低噪音設計使得機器在工作時不會打擾到家庭成員的休息或工作。此外,無刷電機的壽命更長,減少了用戶的維護成本,提高了產品的性價比。
2.掃地機器人智能化程度的提升
發(fā)表于 05-05 15:03
DIY推薦!自制一個基于ESP32的沙畫機器人
了機器人底板,建模了懶人轉盤軸承和中央齒輪組合。
附上機器人組裝的剖面和爆炸視圖,好讓大家更詳細地了解它們如何組裝。
步驟2:3D打印
我用黑色Polymaker ABS打印了所有
發(fā)表于 04-15 15:09
AMR倉儲機器人如何賦能新零售?
AMR倉儲機器人在新零售領域的應用為其賦能,實現(xiàn)了以下幾個方面的重要功能: 提升倉儲效率和速度:新零售模式下,訂單量通常較大且多樣化,要求倉儲操作更加高效和靈活。AMR倉儲機器人可以自
2024機器人賽道強勢開局 多家上市公司布局機器人領域
2月26日,中威電子、華研精機、邁赫股份、信邦智能、豐立智能、蘭劍智能、天準科技等多家機器人相關企業(yè)出現(xiàn)20%漲停,克來機電、機器人、江蘇北人等機器人相關企業(yè)漲超10%。
【開源項目】Emo:基于樹莓派 4B DIY 能笑會動的桌面機器人
Emo是一款基于樹莓派4做的個人伴侶機器人,集時尚與創(chuàng)新于一身。它不僅僅是一款機器人,更是一個活生生的存在,與其他機器人不同,它擁有獨特的個性和情感。
硬件部分
樹莓派 4B
微雪 2
發(fā)表于 12-26 15:18





 工商網監(jiān)
工商網監(jiān)
評論