


今天分享創意電子IDY,使用16通道PCA9685驅動模塊和DS1302實時時鐘模塊來構建機械七段顯示時鐘,該時鐘使用28個舵機,使用Arduino Uno驅動。
1、所需材料
Arduino Uno
DS1302時鐘模塊
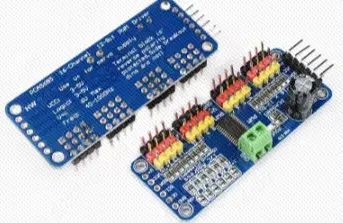
2 x PCA9685 16通道舵機驅動模塊
28 x 9g舵機
杜邦線
公頭排針
母排針排
3mm MDF
黑色噴漆
5V 5A電池
12V電源
還需要3D打印某些組件。如果沒有3D打印機并且喜歡做東西,那么絕對應該考慮購買一臺。如果不想購買也可以在網上打印。
2、3D打印組件
首先設計了一個單獨的7段顯示數字,該數字可以通過每個段的舵機來啟動。舵機在開啟時垂直移動每個段,在關閉時則向側面移動90度。
這些段設計為直接粘貼到標準舵機臂上,因此不需要其他硬件。
3D打印文件在文末獲取。
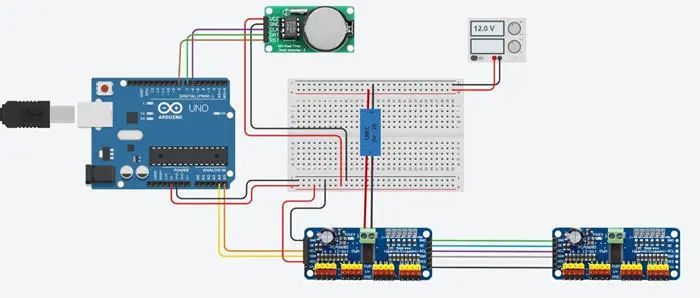
3、焊接電路
使用了兩個PCA9685 16通道PWM驅動器,這些驅動器允許您在每個板上控制多達16個伺服器,并通過I2C接口將多達62個板鏈接在一起,該接口僅在Arduino上使用兩個IO引腳。這意味著從理論上講,您只需兩個IO引腳即可獨立控制多達992個伺服器。我們將在兩個小時的數字中使用一個,在兩個分鐘的數字中使用一個。
要將兩者鏈接在一起,您需要首先在第一塊板的另一側添加一個引腳接頭,然后更改第二塊板上的地址,以便對其進行唯一標識。
這是通過橋接板右上方的小端子實現的。它們像撥碼開關一樣工作,使您可以為每個板設置不同的地址。您只需要在該項目的最右邊橋接一組終端。
在修改地址后,制作連接線將兩個模塊連接在一起,然后連接時鐘模塊和Arduino Uno,電路圖如下:
4、組裝時鐘顯示
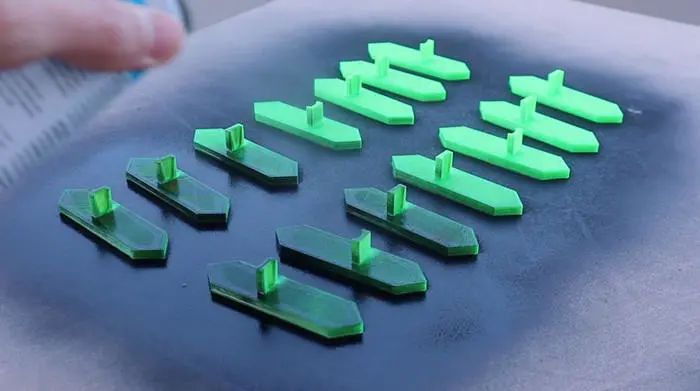
完成3D打印的線段后,您需要將線段的背面和側面噴涂成黑色以匹配背景,以使它們在轉開時不可見。如果將它們保留為綠色,則當將線段旋轉90度時,仍會沿可見細線著陸。同時噴涂點的背面和側面,以便從側面看不到它們。
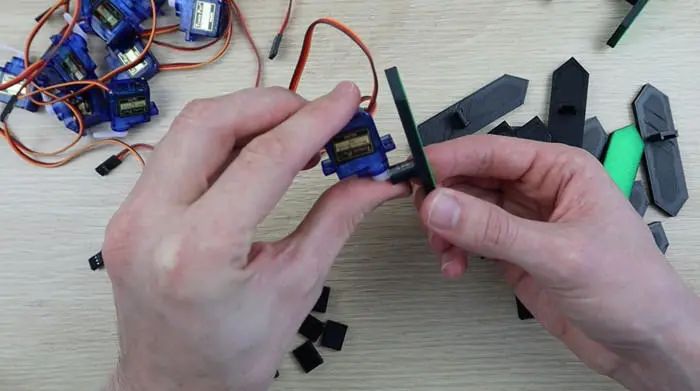
接下來,使用熱熔膠將線段粘貼到舵機臂上。最簡單的方法是將臂放到舵機上,然后將線段粘到舵機和臂組件上,這也使您可以檢查是否將其直接粘著。
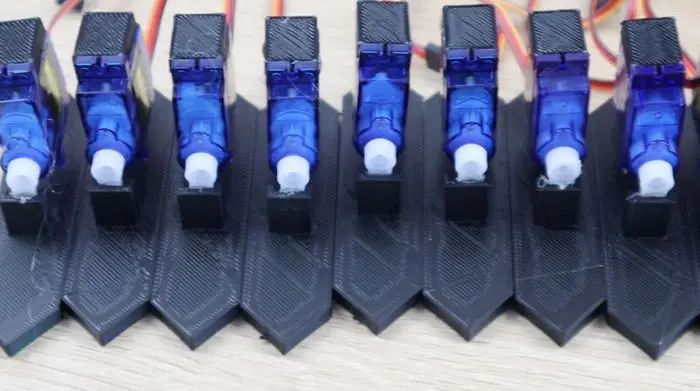
您還需要將小的3D打印間隔塊也粘貼到每個伺服器的底部,當將它們粘貼到背板上時,這些有助于伺服器直立。
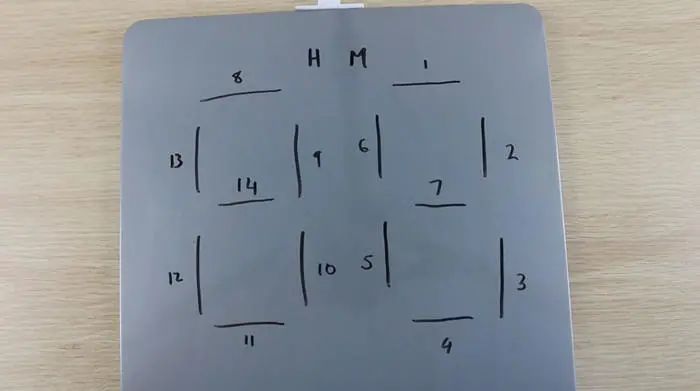
給每個段編號,以便在代碼中跟蹤它們。在小時和分鐘板上重復了此編號。
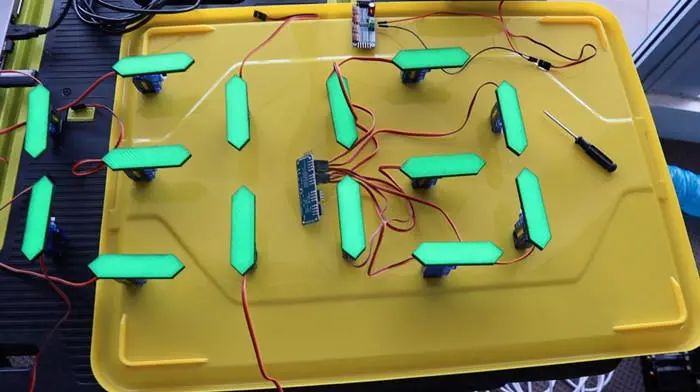
在將數字粘貼到背板上之前,將它們放在平坦的表面上進行測試。這樣一來,它們就可以移動,而不必擔心它們會沿錯誤的方向移動或移動得太遠而彼此碰撞,這可能會損壞各段或使舵機上的齒輪脫落。
一旦對數字的移動感到滿意,就可以接下來開始工作了。
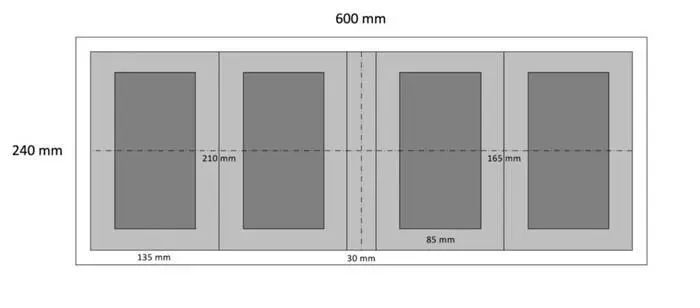
需要一個至少600mmx240mm的背板。淺灰色的大盒子是扇形塊移開時移動的區域,它們必須至少為210mmx135mm,以便相鄰的扇形塊不會當它們都向外移動到關閉位置時,請勿觸摸。內部較暗的矩形是組成每個數字外側的6個舵機的中心線。最后,在點的內數字之間留30mm。
測量并從一塊3mm MDF上切下后板,然后將其噴涂成黑色。

按照圖示在背板上標記段的位置,然后開始將它們粘貼到位。
數字完成后,您需要隱藏布線。在每個舵機附近的板子背面鉆孔,以使舵機電線穿過,需要事先對引線進行編號。在每一個上滴一小滴膠水以將它們固定在適當的位置。
使用雙面膠帶將四個電子板粘貼到時鐘的背面。 您也可以用螺釘安裝它們,只需確保螺釘不會完全穿過MDF到達另一側即可。
在下載軟件的最終版本之前,從舵機上拆下了機械臂,這樣就可以對豎立位置進行細微調整,而不必擔心它們會相互碰撞。一個好主意是從舵機上拆下臂并保持關閉,直到您為板子加電并且將伺服器全部置于“開”位置為止(顯示88:88)。這樣,您可以將它們放回原位,而不必擔心它們會相互碰撞和碰撞。
5、上傳程序
程序中使用了時鐘驅動庫和舵機驅動庫
6、DIY完成
現在可以使用你的機械段碼時鐘了。
責任編輯:pj
-
驅動
+關注
關注
12文章
1919瀏覽量
86995 -
時鐘模塊
+關注
關注
1文章
61瀏覽量
14609 -
3D打印機
+關注
關注
9文章
538瀏覽量
45267
發布評論請先 登錄
ULN2003 7通道SOP16封裝達林頓晶體管驅動器英文手冊
【CW32模塊使用】16路舵機驅動模塊

新品 | Atomic Motion Base v1.1:為ATOM主控系列設計的2路直流電機與4路舵機驅動底座


擴展電網應用中的模擬輸入通道(使用16通道、16位、1MSPS雙路同步采樣ADC)

ADS112C04 16位4通道2kSPS Δ-Σ ADC數據表
ADS112U04 16位4通道2kSPS Δ-Σ ADC數據表





 工商網監
工商網監

評論