

表層程序:
KLIN VB=8[mm/s] Genau=2[mm]ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
軌跡程序
1: FB PSPS = M30 & M32 & M39 & E41 & E45& E56 & E74 & E77 & E80
SPS程序
內(nèi)部程序:
VW_MPARA_ACT=P6_D 點號轉(zhuǎn)存
Act_P1 =P6 存儲點
Act_P2 =P6 存儲點
VW(#MPARA,TRUE)執(zhí)行后臺 輔助程序
SPS_FERTIG=FALSE
TRIGGERWHEN DISTANCE=1 DELAY=0 DO SPS_TRIG(10006) PRIO=-1 執(zhí)行SPS程序
LIN P6C_DIS 執(zhí)行工藝直線軌跡
$ADVANCE=1 激活預(yù)執(zhí)行
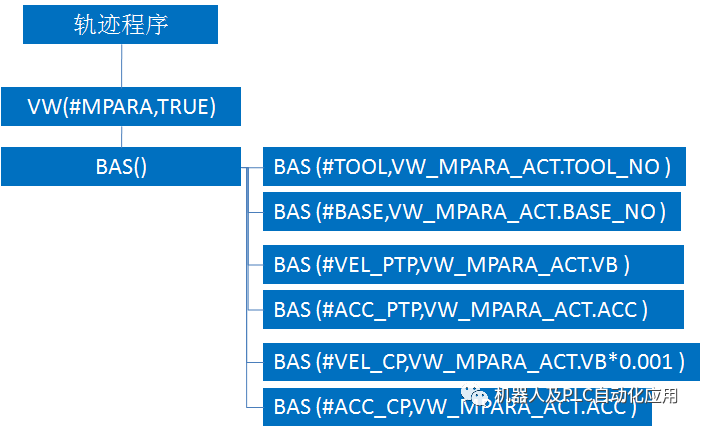
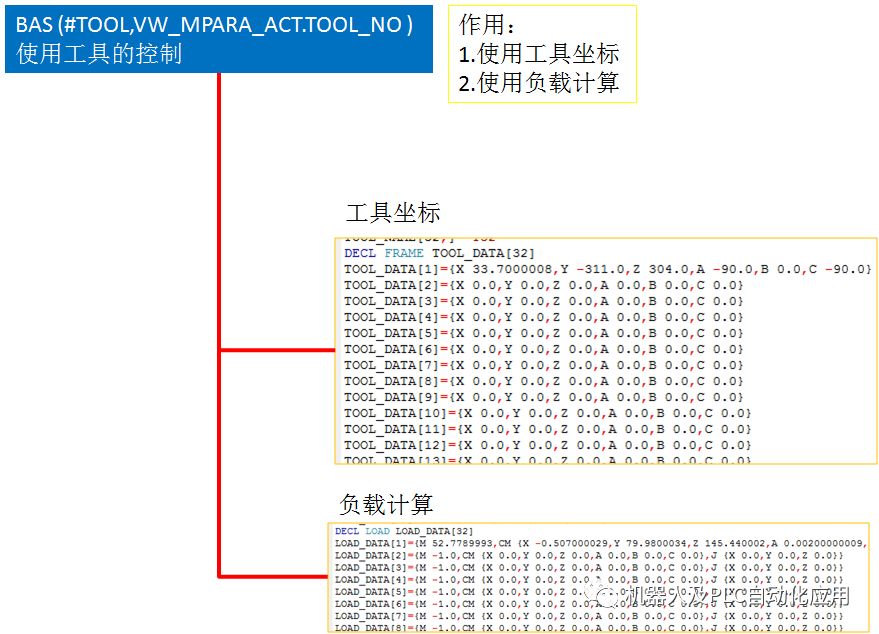
DEF TOOL (TOOL_NO:IN )
INT TOOL_NO 聲明: 整數(shù)形式變量TOOL_NO
IF (TOOL_NO==0) THEN 如果工具號 為 0
$TOOL=$NULLFRAME 對工具坐標(biāo) 進行清零
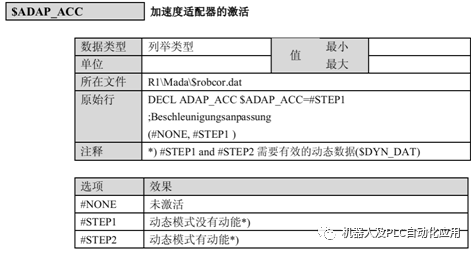
IF $ADAP_ACC《》#NONE THEN 加速度適配器的激活 = #STEP2
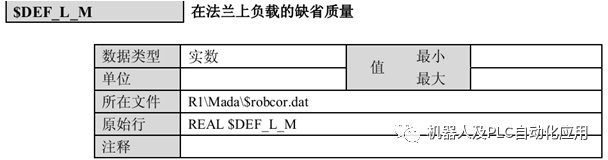
$LOAD.M=$DEF_L_M 載荷質(zhì)量 機器人自身值
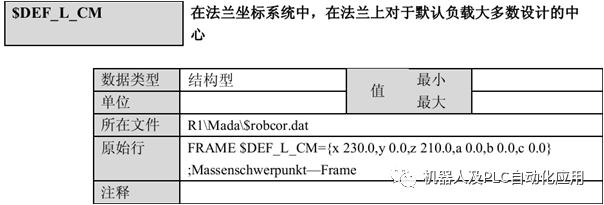
$LOAD.CM=$DEF_L_CM 載荷重心
$LOAD.J=$DEF_L_J 載荷 慣性
ENDIF
ELSE -------如果有工具號
CONTINUE
$TOOL=TOOL_DATA[TOOL_NO] 使用工具庫對應(yīng)的號里的工具信息
IF $ADAP_ACC《》#NONE THEN加速度適配器的激活 = #STEP2
IF LOAD_DATA[TOOL_NO].M《0 THEN 負載庫里的重量值為小于0
$LOAD.M=$DEF_L_M 使用機器人自身計算值
$LOAD.CM=$DEF_L_CM
$LOAD.J=$DEF_L_J
ELSE---------負載庫里的重量值有數(shù)
$LOAD.M=LOAD_DATA[TOOL_NO].M CONFIG.dat里計算值質(zhì)量
$LOAD.CM=LOAD_DATA[TOOL_NO].CMCONFIG.dat里計算值重心
$LOAD.J=LOAD_DATA[TOOL_NO].JCONFIG.dat里計算值慣性
IF (($LOAD.M《》0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0) AND ($LOAD.J.Z==0)) THEN如果有重量,但重心 是0,0,0就用機器人自身值
$LOAD.J=$DEF_L_J載荷重心
ENDIF
ENDIF
ENDIF
ENDIF
CONTINUE
$ACT_TOOL=TOOL_NO 激活的工具號
END
$LOAD預(yù)先運行中當(dāng)前有效的載荷數(shù)據(jù)
該結(jié)構(gòu)包含輸入到機器人控制器中并分配給當(dāng)前工具的有效載荷數(shù)據(jù)。參考坐標(biāo)系是FLANGE坐標(biāo)系。
$LOAD={M 重量 , CM重心, J慣性}
M質(zhì)量類型:REAL;單位:公斤
CM 重心 FRAME
X,Y,Z:重心相對于法蘭的位置
A,B,C:主慣性軸相對于法蘭的方向
J慣性: Type: INERTIA
X,Y,Z:圍繞相對于法蘭旋轉(zhuǎn)了A,B和C的坐標(biāo)系軸的慣性矩。
DEF BASE (BASE_NO:IN )
INT BASE_NO 聲明: 整數(shù)形式變量BASE_NO
IF (BASE_NO==0) THEN 如果給的BASE號是0
CONTINUE
$BASE=$WORLD就使用全球坐標(biāo)作為$BASE坐標(biāo)值
ELSE 如果給的BASE號不 是0
CONTINUE
$BASE=BASE_DATA[BASE_NO]將CONFIG.dat里的BASE庫值 寫入BASE坐標(biāo)里
ENDIF
CONTINUE
$ACT_BASE=BASE_NO ; 顯示當(dāng)前使用的BASE號
CONTINUE
$ACT_EX_AX=-1 外部軸使用的BASE號
責(zé)任編輯:pj
-
機器人
+關(guān)注
關(guān)注
213文章
29563瀏覽量
211919 -
適配器
+關(guān)注
關(guān)注
9文章
2042瀏覽量
69416 -
SPS
+關(guān)注
關(guān)注
1文章
71瀏覽量
10713
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論