 機器人主氣缸C50氣管連接說明
機器人主氣缸C50氣管連接說明
這次焊鉗的氣管接錯,沒有造成焊鉗故障報警,但是在焊鉗進行夾緊時出現卡頓現象。在作機器人E1軸移動時報拉拽故障。下面讓我們分析一下氣路。
伺服焊的第七軸(MQB)隨動:
機器人運動過程中焊槍可以定位速度可在5% 到100 %之間變化機器人監控運動過程。
(FESTO伺服焊鉗控制器)
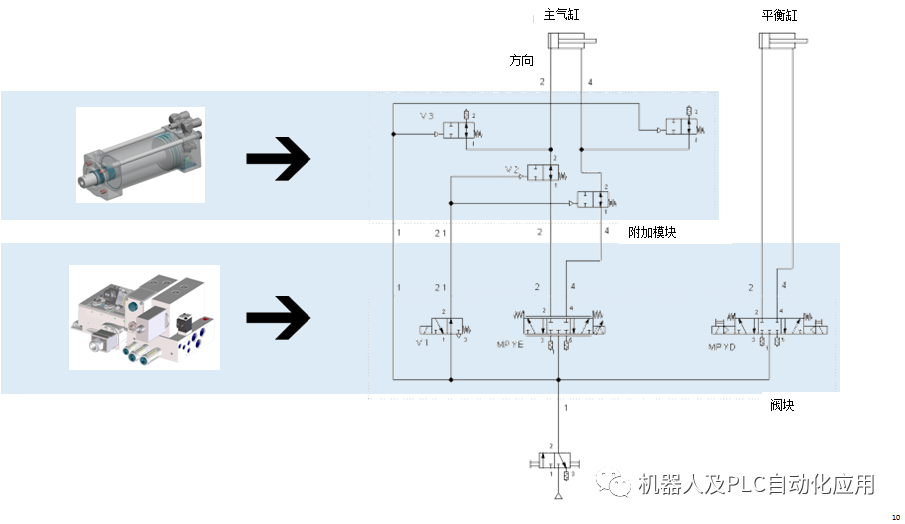
(氣伺服焊鉗氣路圖, 圖中的MSEB閥與實際工作原理相反)
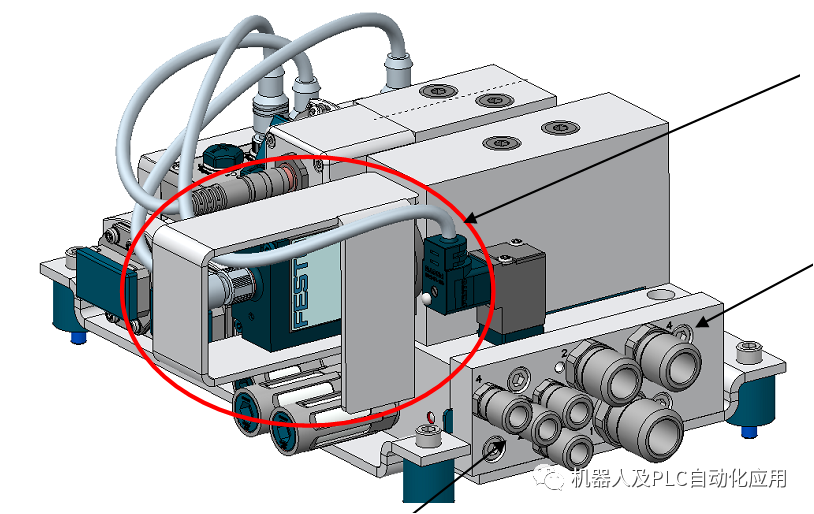
主氣缸(C50)氣管連接說明圖:
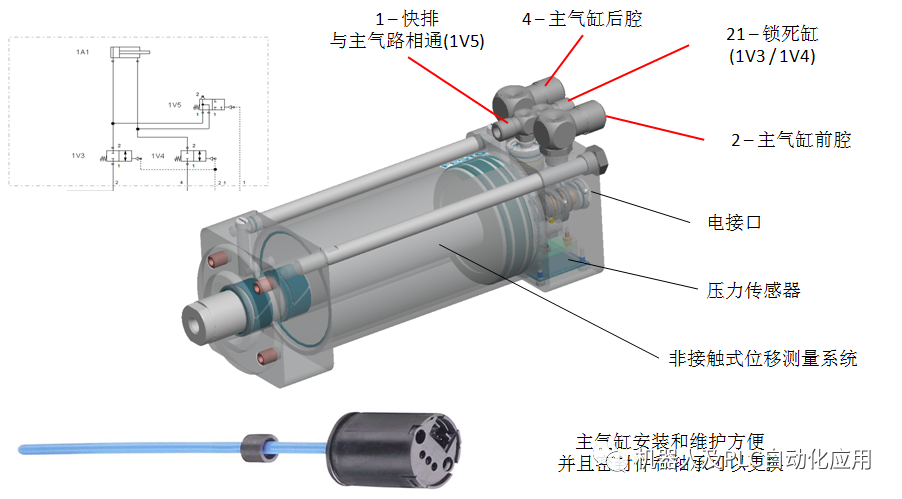
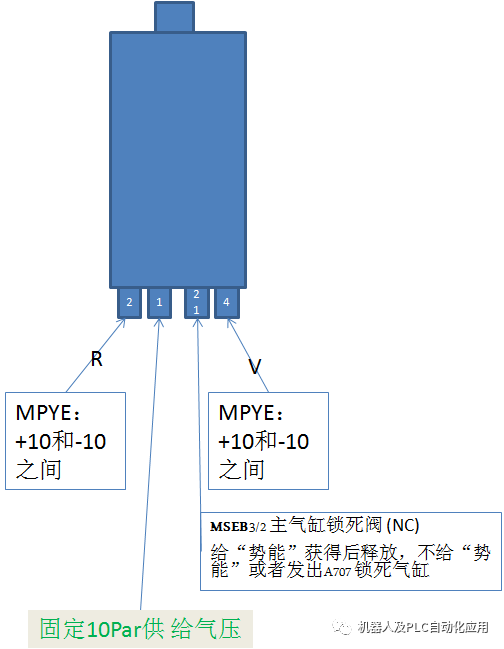
MSEB:控制鎖死閥,給主氣缸21的解鎖壓力不大
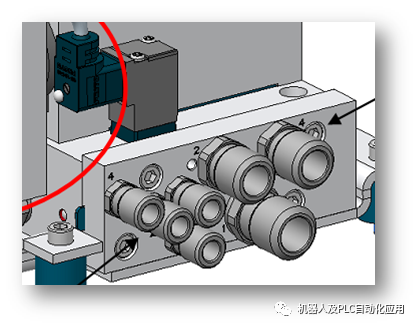
注意:閥座出氣口的標號1/21是接到主氣缸上的1/21的。
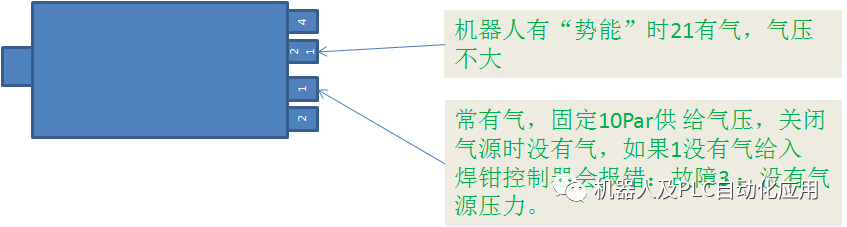
1.機器人有“勢能”時21有氣,氣壓不大(由MSEB閥控制)。
2.主氣缸1號管是常有氣,氣壓很大,為10PAR氣源的壓力。
故障3 :沒有氣源壓力。
主氣缸氣壓連續4秒內小于1bar(注意:氣源供給沒有監控)。如果兩邊氣腔內氣壓大于3bar,則該錯誤將自動消除。
沒有E705焊鉗準備就緒,E783壓力過低, E784普通故障。
1.檢查氣源供給。檢查氣管連接。
2.檢查主氣缸附加塊(隔斷閥)。
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
監控
+關注
關注
6文章
2204瀏覽量
55171
發布評論請先 登錄
相關推薦
復合機器人在3c電子行業的應用
時代在發展科技在進步,復合機器人在3C電子行業中的應用已經變得越來越廣泛,它們以高效、精確和靈活的特點,為3C電子產品的生產帶來了顯著的變革。以下是對復合機器人在3
BD工業級除草機器人連接器
高顏“實力派”:BD系列工業級連接器為除草機器人帶來高端連接新方案 ? 電動除草機器人,以其更智能、高效率、無環境污染的特質,堪稱除草界的“高大上”。作為一款電驅的

氣缸磁性開關怎么接線
氣缸磁性開關是一種用于檢測氣缸活塞位置的傳感器,廣泛應用于自動化設備、機器人、氣動控制系統等領域。 一、氣缸磁性開關的工作原理 氣缸磁性開關
柔性機器人和剛性機器人有什么區別?
則由剛性桿及其關節連接構成,運動自由度相對較少。控制方式:柔性機器人通常采用基于力和視覺感知的控制系統,而剛性機器人則主要采用編程控制。應用領域:柔性機器人主要應用

機器人主控器的主控芯片在功能上與什么相似
本文將深入探討機器人主控器的主控芯片,分析其在功能上與其他技術產品的相似之處。 一、引言 隨著科技的不斷進步,機器人技術在各個領域得到了廣泛應用。機器人主控器作為機器人系統的大腦,其性
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
配電房掛軌巡檢機器人
晟機器人推出B3系列升降云臺軌道機器人將改變傳統的人工巡檢模式,實現智能升級,為配電房的安全穩定運行保駕護航。 一、巡檢機器人產品概述 B3系列升降云臺軌道機器人主要由軌道、
DIY推薦!自制一個基于ESP32的沙畫機器人
插座
帶有滑輪的400毫米GT2同步帶
步驟1:Fusion 360
我設計這個動態沙畫機器人時非常輕薄,打印后高度不到3英寸(7.62 厘米)!有很多重疊的零件,主要集中在大尺寸的Theta齒輪連接
發表于 04-15 15:09
YM20包膠款工業級連接器解決AGV搬運機器人電源連接需求
級連接器來承擔電源連接的角色。YM20包膠款連接器用于AGV搬運機器人對于AGV搬運機器人,需要用到更可靠和更適應車載與車間環境的工業級

EPSON助力智能泳池清潔機器人導航
與家用掃地機器人相同的部分是目前泳池清潔機器人主要還是隨機式行走,沒有加入路徑規劃部分,清潔效率較低,未來將很快步入規劃式時代。不同的部分是泳池內的環境與家用掃地機

工業機器人連接解決方案
工業機器人工業機器人是一種自動化機器,可以在工業環境中執行各種任務,例如搬運、焊接、裝配、檢測等。它們通常由機械臂、控制器、傳感器等部分組成,可以通過編程和自動化技術實現高效、精準的生產。工業

機器人的前世今生
機器人主要是用于代替人工作的,首先它是一個機器。對于傳統的機器,被使用者設計制造出來后,它的工作步驟、路徑都是確定的。機器的設計也是根據它所應用的工作而進行的。
發表于 12-29 14:54
?557次閱讀

淺談服務機器人主要市場及驅動來源
當提高生產率和降低成本成為服務機器人的共同特征時,針對市場特定問題或需求,人們希望每個服務機器人系統能提供獨一無二的、有競爭力的解決方案。
發表于 12-25 09:45
?226次閱讀





 工商網監
工商網監
評論