 VASS05機器人2.20系統ProConOS_IO接口解析
VASS05機器人2.20系統ProConOS_IO接口解析
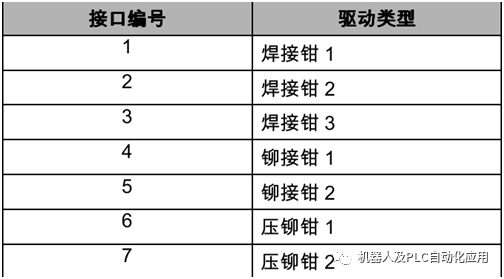
生成文件使用的接口:
接口1
接口2
接口3
接口4
接口5
接口6
接口7
2.選擇激活ProConOS_IO,激活軟件后開始進行尋找設備IO激活外部軸E1.
IO區域 焊鉗1從705開始 焊鉗2從865開始, 焊鉗3從1025開始.
鉚鉗1 從1185開始, 鉚鉗2 從1265 開始. 壓鉚鉗1從 1345開始
壓鉚鉗2 從1425開始.
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28501瀏覽量
207484 -
接口
+關注
關注
33文章
8639瀏覽量
151385
原文標題:VASS05機器人2.20系統ProConOS_IO接口解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主
發表于 01-04 19:22
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
閱讀《具身智能機器人系統》第10-13章,我對具身智能機器人的工程實踐有了全新認識。第10章從實時性角度剖析了機器人計算加速問題。機器人定位
發表于 01-04 01:15
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
,能夠利用\"思維鏈\"的技術將復雜任務分解為多個子任務,以漸進的方式解決問題。這不僅提高了任務的成功率,也顯著增強了系統的魯棒性,使得機器人可以更高效地應對復雜環境和多樣化需求
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
感謝
感謝電子發燒友網社區給予《具身智能機器人系統》試讀機會。在這知識的盛宴中,我感受到社區的關懷與支持。定不負期望,認真研讀,分享所學,回饋社區。
一、本書大綱
《具身智能機器人系統
發表于 12-28 21:12
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
了解具身智能機器人相關的知識,我感到十分榮幸和幸運。
全書簡介
本書以循序漸進的方式展開,通過對具身智能機器人技術的全方位解析,幫助讀者系統化地學習這一領域的核心知識。
首先在第一部
發表于 12-27 14:50
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
提供了對機器人環境和動作的統一和詳細的理解。只有在這些過程之后,數據才能有效地用于訓練 EAI 系統。
目前,應用 Sim2Real 技術的主要障礙是“現實差距”,即模擬環境與現實世界之間的差異,包括物理
發表于 12-24 00:33
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》 一書由甘一鳴、俞波、萬梓燊、劉少山老師共同編寫,其封面如圖1所示。
本書共由5部分組成,其結構和內容如圖2所示。
該書可作為高校和科研機構的教材,為學生和研究人員提供系統
發表于 12-20 19:17
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
、谷歌的RT系列等前沿產品中展露鋒芒。這些突破性成果標志著AI正從虛擬世界邁向物理世界的深度交互。
而研讀《具身智能機器人系統》前六章,我對具身智能(Embodied Artificial
發表于 12-19 22:26
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
本帖最后由 Tronlong創龍科技 于 2024-7-19 17:18 編輯
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它
發表于 07-09 11:38
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
abb機器人的io通信和信號設置過程
引言 ABB機器人作為工業自動化領域的重要設備,其IO通信和信號設置是實現機器人與外部設備進行數據交換和控制的關鍵。本文將詳細介紹ABB機器人的IO
機器人舵機:關鍵要素解析與選擇指南
在機器人技術日新月異的今天,舵機作為機器人的核心部件之一,扮演著至關重要的角色。它的性能直接關系到機器人的運動控制、穩定性以及精度等方面。那么,在選擇和使用機器人舵機時,我們需要關注哪






 工商網監
工商網監
評論