 基于無線通信技術和定位技術實現車輛監控系統的設計
基于無線通信技術和定位技術實現車輛監控系統的設計
車輛監控系統是融合了全球衛星定位技術、地理信息技術和無線通信技術于一體的綜合系統。該系統將移動車輛接收到GPS數據(經緯度、高度、時間、速度等)進行解析,并實時地通過無線通信信道上傳至監控中心。監控中心在電子地圖上對被監控車輛的參數進行顯示監控和查詢,同時利用無線通信鏈路向移動終端發送控制和消息。該系統適用于不同的監控場合,經濟效益和社會效益明顯,可廣泛地應用于客運、銀行、公安、物流行業、車輛自動導航、公交智能交通管理等領域。
1、 GPS與GPRS
全球定位系統(Global Positioning System,GPS)是美國從上世紀70年代開始研制的具有在海、陸、空全方位實時三維導航與定位能力的新一代衛星導航與定位系統,由于能為用戶目標提供全天候、高精度、連續實時的導航、定位和授時,已被廣泛應用于地面移動目標的跟蹤定位。
隨著移動GPRS業務的開展,利用GPRS來進行GPS數據傳輸優勢明顯。GPRS(General Packet Radio Service,通用分組無線業務)是一種以分組交換技術為基礎,采用IP數據網絡協議,傳輸高速、低速數據及信令的高效數據傳輸網絡。相對于傳統的遠程傳輸方式來說,GPRS數據傳輸具有突出的優點。一方面,GPRS資費比較便宜,可以采用多種資費方案。對于大數據量業務的用戶可以采用包月的方式,對于小數據量業務的用戶可以根據通信的數據量和提供的服務質量進行計費。另一方面,在GPRS網中,用戶只需與網絡建立一次連接,就可長時間的保持這種連接,并只在傳輸數據時才占用信道并被計費,保持時不占用信道不計費。這樣,數據采集點不用頻繁建立連接,也不必支付傳輸間隙時的費用,而且GPRS能夠較好地支持頻繁、少量突發型的數據業務。此外,GPRS網絡接入速度快,提供了與現有數據網的無縫連接。由于GPRS網本身是一個分組型數據網,支持TCP/IP,X.25等協議,可以直接與分組數據網(IP網或X.25網)互通,接入速度快于電路型數據業務。
2、 系統組成和功能
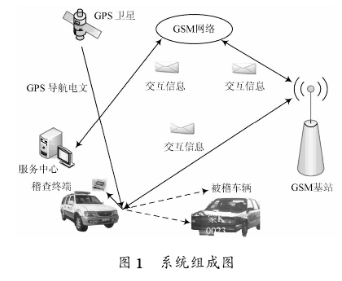
整個基于GPS/GPRS車輛監控系統由車載移動終端、通信網絡和監控中心組成。其系統組成如圖1所示。
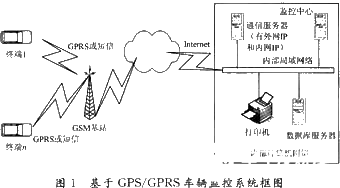
移動車輛配備的GPS接收機用以獲取自己當前的位置、時間等信息,通過GPRS或短信的方式上傳到中心通信服務服務器。在監控中心站,通訊服務器接收各監控目標的位置信息,并通過通信控制器送往中心服務器在電子地圖中顯示,對當前受監控車輛所在的位置、車速及行進方向進行實時監控,并可以通過網絡對車載終端進行控制,實現移動車輛與監控中心的雙向數據傳輸,完成對車輛運行狀態、安全狀態、技術狀態的監控。
3、 車載移動監控終端的設計和實現
根據系統結構框架,車載終端實現的主要功能有移動監控功能,當接收到監控中心的監控命令后,自動地根據要求將位置信息通過GPRS或SMS發送到監控中心;車體控制功能,根據接收的控制命令實現對車體的控制,比如點火線等端口的監測、斷電/油路;安防功能,當汽車遇到特殊情況,如遇劫等,可以通過按鈕發送SMS向監控中心報警。
3.1 系統組成的硬件框圖
車載移動終端由主控處理器、GPRS通信模塊、GPS模塊等組成,其結構框圖如圖2所示。根據車載設備低功耗的要求,主控芯片上我們選用了SAMSUNG公司的S3C44B0X。S3C44B0X采用ARM7TDMI內核,并提供豐富的內置部件,包括:8 kB cache、內部SRAM、LCD控制器、帶自動握手的2通道UART、I/O端口、8通道10位ADC、PLL倍頻器等,他的低功耗精簡和出色的全靜態設計特別適合用于對成本和功耗敏感的應用。
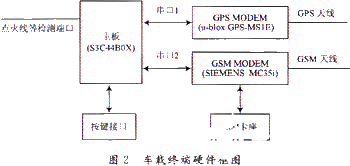
GPRS模塊是整個系統的通信基礎,我們采用SI-MENS的MC35i。MC35i是新一代GSM/GPRS雙模模塊,支持GSM900/GSM1800雙頻和GRPS Class 8/ClassB。MC35i體積小巧,功耗低,能提供數據、語音、短信、傳真功能,可廣泛用于遙感測量記錄傳輸、遠程信息處理、電話。GPRS模塊通過串行口UART2與主控芯片通信。
GPS接收單元我們采用μ-blox的GPS-MS1E,他具有高捕獲和靈敏度、超低功耗、體積小等優點,主控芯片對GPS的控制主要是通過串行口UART1接收GPS定位信息。
用戶按鍵與SC44B0的相應的I/O口連接以便控制器狀態變化。同時系統還預留了豐富的外圍接口,可靈活外接各種數據采集子系統,具有較大的可擴展性。
3.2 系統軟件設計
由于車載終端需要完成與GPS模塊、GPRS模塊、其他I/O模塊的交互和監控,單一的任務無法完成,因此需要實時操作系統的支持。在嵌入式操作系統上選用美國著名RTOS廠商ATI公司的Nucleus PLUS。他是在嵌入式實時多任務操作系統Nucleus基礎,為實時嵌入式應用而設計的一個搶先式多任務操作系統內核。Nucleus PLUS對CPU的支持能力比較強,支持當前流行的大多數RISC,CISC,DSP處理器。其95%的代碼是用ANSI C寫成的,非常便于移植并支持大多數類型的處理器。Nucleus PLUS提供了任務控制、任務通信、任務同步、內存管理、可編程的定時器、標準的輸入/輸出設備接口等系統服務。
按功能上將系統應用軟件分為9個模塊,每個模塊由一個主任務和若干個子任務組成,任務內部采用有限狀態機的方式進行切換,任務之間采用消息管道(pipe)進行通信,每個模塊都定義了自己的消息接受管道。各個模塊之間的關系如圖3所示。
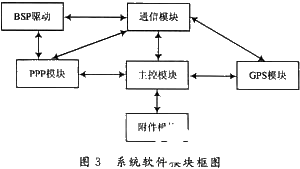
(1) 主控模塊是系統的核心模塊,負責系統的控制,以消息分發的方式與其他模塊交互,并控制其運行狀態達到總體控制系統運行的目的。根據系統工作時處理的不同任務將主控模塊劃分為啟動上電、正常工作、處理SMS數據、處理GPRS數據和退出下電五個狀態。主控模塊的任務名為SyscMain,他有自己的消息接收管道pipe[SY-SC],他循環地從此管道中接收和處理消息,并根據消息體的內容在主控模塊的不同的狀態之間轉移切換,同時通過向其他模塊的消息管道發送消息來控制他們的運行狀態,另一方面其他模塊通過消息管道向主控通知其自身的運行狀態和接受的數據,以接受主控模塊的監控。
(2) GPS模塊主要負責GPS數據的接收和解析。由于GPS輸出數據采用NMEA-0183格式,輸出數據為多種格式,在本系統中,僅選擇了取其中的一種數據格式:GPRMC(推薦最小數據量的GPS信息),其格式為(見表1):
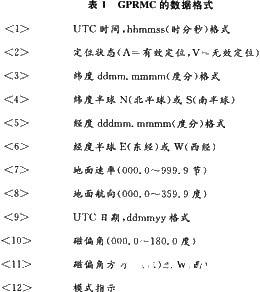
當GPS輸出數據為有效定位數據時,提取相應的信息(經緯度、高度、速度等),同時轉換UTC時間為本地時間,封裝為系統自定義的GPS DATA數據格式發送到通信任務模塊。
(3) PPP模塊負責GPRS的底層PPP連接和PPP數據包的處理。點對點協議(PPP)為在點對點連接上傳輸多協議數據包提供了一個標準方法。在TCP/IP協議集中他是一種用來同步調制連接的數據鏈路層協議。該模塊實現負責TCP/IP協議棧低層的PPP協議的連接和釋放,以及相應收到的PPP數據幀的處理與上層的TCP/IP層交互。主要包括PPP協議數據幀的封裝方式、初始化的LCP協議的協商、PAP密碼驗證和NCP協議的協商過程的處理。該模塊由外掛模塊Nucleus NET提供支持。
(4) 通信模塊(GPRS模塊)負責與監控中心系統通信,完成GPRS數據的收發和短消息的收發。CPU對GPRS的控制主要是通過UART2發送AT命令實現。GSM AT指令集是由諾基亞、愛立信、摩托羅拉和HP等廠家共同為GSM系統研制的,提供了一種移動平臺與數據終端設備之間的通用接口,并被加入到GSM 07.05標準以及之后的GSM 07.07標準。用戶可以通過AT指令實現呼叫控制、短消息SMS、電話本、數據業務、補充業務、傳真等方面的控制。
為滿足用戶進行GPRS數據通信的要求,NucleusNET作為外掛模塊能與Nucleus PLUS無縫結合從而實現其網絡互聯功能。Nucleus NET通常使用TCP/UDP協議的客戶/服務器運行模式,完成建立連接、發送數據及接收數據的工作。
TCP/IP的建立過程中,首先調用Nucleus NET提供的NU_init函數初始化GPRS網絡,通過相應的設置AT指令來完成,包括檢測是否連接到網絡(AT+CREG),通信信號強弱(AT+CSQ)以及SIM卡的PIN值是否輸入(AT+CPIN)等。然后用PPP撥號方式撥入GPRS網絡,完成底層的數據鏈路層的連接,這部分由上述的PPP模塊來完成。接著調用Nu_Socket函數為他的通信分配一個套接字,然后調用NU_Connect函數與監控中心服務器建立連接成功后,就可以進行GPRS數據的發送NUSend.和接受NU_Reev.
在監控中心服務器和移動終端上的數據傳輸協議上,為了兼容GPRS和GSM短消息這兩種通信方式,系統自定義了如圖所示的通信幀結構,其中協議幀最大長度為140 B,包括幀控制字節。

其中固定使用字母“A”作為幀頭;幀類型用來表示該幀的具體含義,當為下行通信幀(監控中心服務器→終端)時表示為監控中心對終端的控制命令類型,比如設定定時報位命令、設定超速報警命令、終端配置命令等。當為上行通信幀(終端→監控中心服務器)時該字節省略;幀長為該幀體字段的長度;幀長的反為幀長字段按位取反的結果;幀體是個串類型,依據幀類型的不同表示不同的含義,當該幀為上行通信幀時,幀體的內容為系統自定義的GPS數據;幀序號從0開始到255后歸0,用來對幀順序進行判斷;校驗和為幀類型、幀長、幀長的反、幀序號、幀體幾個字段各字節按字節異或的結果,用來判斷該幀的正確性。
另一方面,用戶還可以通過按鍵發送SMS來上報監控中心。主控芯片利用串口向GSM Modem收發一系列的GSM 07.05標準所定義的AT命令集,就能達到控制收發SMS的目的。根據GSMGSM 07.05標準,對SMS的控制共有3種接入協議:Block Mode;基于AT命令的TextMode;基于AT命令的PDU Mode。本系統采用PDU模式對短信息正文經過十六進制編碼后傳送。PDU模式下可以采用3種編碼方式來對發送的內容進行編碼,他們是7 b,8 b和UCS2編碼。7 b編碼用于發送普通的ASCII字符,他將一串7 b的字符(最高位為0)編碼成8 b的數據,每8個字符可“壓縮”成7個;8 b編碼通常用于發送數據消息;而UCS2編碼用于發送Unicode字符。發送SMS的具體過程為:
①首先發送AT以測試GSM Modem連接是否正常,等待GSM Modem返回OK;
②發送ATE0設置GSM Modem取消回顯模式,等待返回OK;
③發送AT+CMGF=0設置發送短信時選用PDU格式編碼,等待返回OK;
④接下來為正式發送SMS,先調用PDU編碼函數對接收到GPS數據GPS_DATA進行編碼,并根據通信協議封裝為上行通信幀格式,然后發送指令。
AT+CMGS=監控中心短消息號碼+回車符(0x0d,0x0a)+上行通信幀數據+回車符(0x0d,0x0a),等待返回OK。
上述的每個步驟完成后都必須加上回車符號(0x0d,0x0a)以使GSM Modem區別為不同的AT指令,而且都必須等待相應的應答,若失敗(回應ERROR),需重新發送該AT指令。
(5) 附件模塊負責終端硬件設備的檢測,并通知主控模塊,實現應用程序對終端硬件的控制。
CPU對其他外圍接口的控制主要通過通用I/O口實現開關(電平)輸入/輸出,同時通過外部中斷的方式實現了與點火信號、車用防盜報警器、緊急報警(SOS)等的接口。
4、 結 語
使用GPRS作為GPS車輛綜合監控調度管理系統的無線傳輸手段,具有費用低、無需線纜施工及安全可靠、維護方便的特點,是一種經濟可行、技術先進的系統構建方案,這將使車輛監控系統具有更為廣闊的應用前景。本文設計的基于GPS/GPRS的車載移動終端已投入實際運行,工作穩定,能夠較精確地完成車輛監控,操作簡單方便。
責任編輯:gt
-
無線通信
+關注
關注
58文章
4564瀏覽量
143496 -
監控系統
+關注
關注
21文章
3904瀏覽量
174419 -
gpa
+關注
關注
0文章
7瀏覽量
4692
發布評論請先 登錄
相關推薦
高速公路GPS車輛動態監控技術研究
測量與控制用無線通信技術介紹及目錄
基于ZigBee技術的PLC無線監控系統設計
無線通信技術
創新的無線技術,《無線通信特刊》帶你跨越設計鴻溝
運用無線通信技術GIS技術和GPS定位技術的車輛監控系統
RFID技術和自組網無線通信技術,對企業人員身份識別、實時定位解決方案
基于PXA270術和GSM無線通信技術實現移動智能車輛稽查系統的設計
巍泰技術TurMass?無線通信與UWB信標定位系統的融合應用,物聯網定位技術的新里程碑





 工商網監
工商網監
評論